
用于运行车辆的自动驾驶系统或辅助驾驶系统的方法及车辆.pdf

努力****爱静


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于运行车辆的自动驾驶系统或辅助驾驶系统的方法及车辆.pdf
本发明涉及一种用于运行车辆的自动驾驶系统或辅助驾驶系统的方法,包括以下步骤:接收传感器数据并对其进行处理,以识别出在本车当前车道中紧邻于本车前方的车辆(S01),判断所识别出的、紧邻于本车前方的车辆是否为具有装载功能的车辆(S02),如果判断所识别出的、紧邻于本车前方的车辆为具有装载功能的车辆,则根据本车与该紧邻于本车前方的车辆间的距离来设定自动驾驶系统或驾驶辅助系统的感知模块处理模式。本发明还涉及一种具有用于执行该方法的控制装置的车辆。
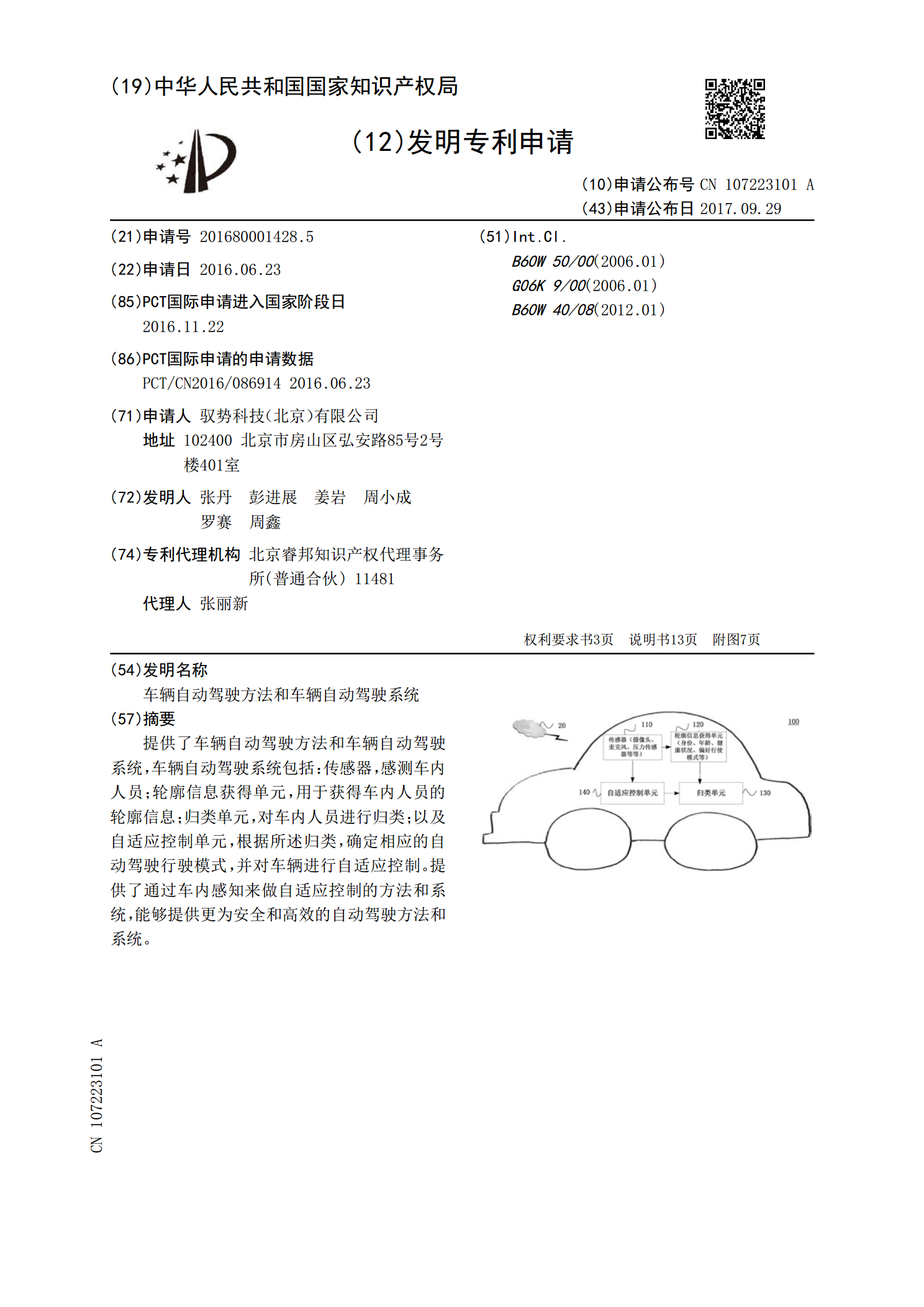
车辆自动驾驶方法和车辆自动驾驶系统.pdf
提供了车辆自动驾驶方法和车辆自动驾驶系统,车辆自动驾驶系统包括:传感器,感测车内人员;轮廓信息获得单元,用于获得车内人员的轮廓信息;归类单元,对车内人员进行归类;以及自适应控制单元,根据所述归类,确定相应的自动驾驶行驶模式,并对车辆进行自适应控制。提供了通过车内感知来做自适应控制的方法和系统,能够提供更为安全和高效的自动驾驶方法和系统。
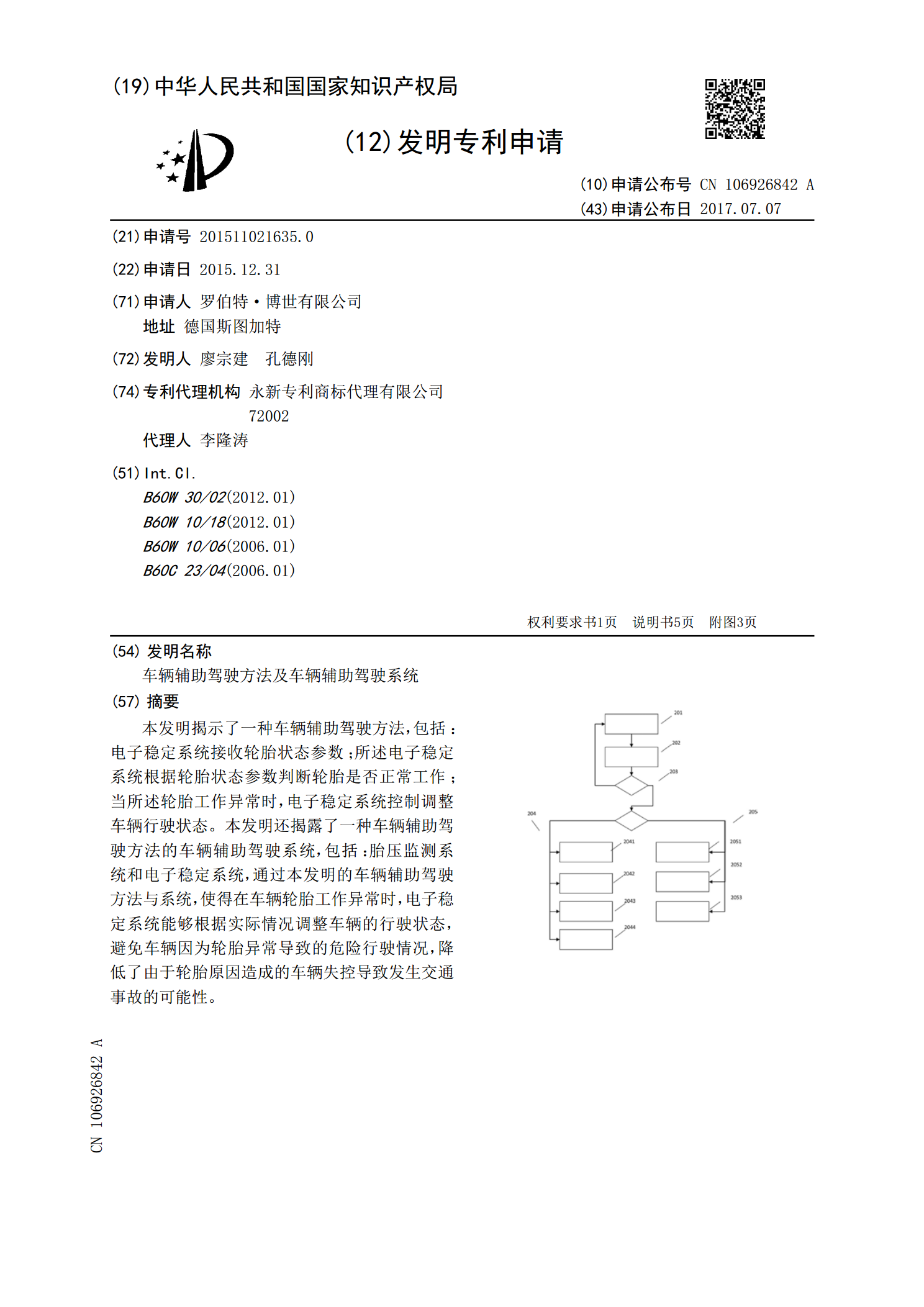
车辆辅助驾驶方法及车辆辅助驾驶系统.pdf
本发明揭示了一种车辆辅助驾驶方法,包括:电子稳定系统接收轮胎状态参数;所述电子稳定系统根据轮胎状态参数判断轮胎是否正常工作;当所述轮胎工作异常时,电子稳定系统控制调整车辆行驶状态。本发明还揭露了一种车辆辅助驾驶方法的车辆辅助驾驶系统,包括:胎压监测系统和电子稳定系统,通过本发明的车辆辅助驾驶方法与系统,使得在车辆轮胎工作异常时,电子稳定系统能够根据实际情况调整车辆的行驶状态,避免车辆因为轮胎异常导致的危险行驶情况,降低了由于轮胎原因造成的车辆失控导致发生交通事故的可能性。

用于车辆的驾驶辅助系统.pdf
本发明涉及一种用于车辆(11)的驾驶辅助系统。为此,所述驾驶辅助系统具有传感器数据,所述传感器数据根据监控所述车辆(11)的环境(15)而被提供。此外,所述驾驶辅助系统还具有用于处理所述传感器数据的处理单元和用于呈现经处理的传感器数据的显示装置(20)。根据本发明,借助所述显示装置(20)来将所述车辆(11)的环境(15)呈现为光带(21)。此外,根据本发明,通过所述光带(21)上的区段(22,23,24)来将所述车辆(11)的环境(15)中的物体(12,13,14)成像,其中所述区段(22,23,24)
用于车辆辅助驾驶的控制方法、装置、系统、介质和车辆.pdf
本发明涉及车辆的控制技术,具体地涉及一种用于车辆辅助驾驶的控制方法、装置、系统、存储介质和车辆。所述方法包括下述步骤:接收影像调取命令,该影像调取命令包括第一命令和第二命令;在接收到第一命令的情况下,调取车辆的盲区影像;在接收到第二命令的情况下,关闭车辆的盲区影像。本发明提出的用于车辆辅助驾驶的控制方案使得驾驶员在驾驶过程中能够全面掌握车辆侧边的盲区情况,从而提高驾驶安全性能,降低安全隐患。