
用于在自动驾驶操作中调整车辆运动的方法和执行该方法的装置.pdf

Jo****63

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于在自动驾驶操作中调整车辆运动的方法和执行该方法的装置.pdf
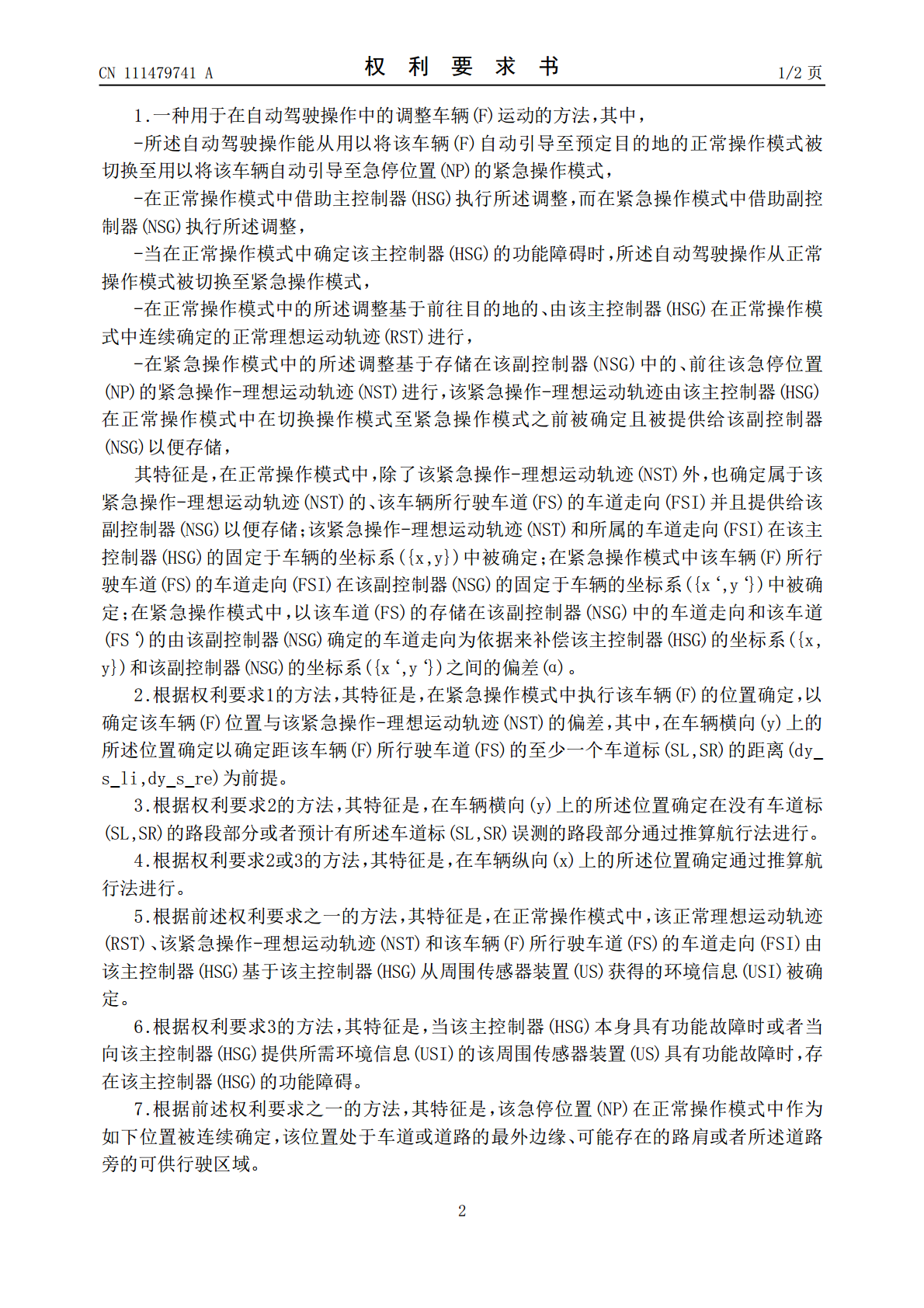
本发明涉及一种用于在自动驾驶操作、尤其高度自动化驾驶操作中调整车辆(F)运动的方法,其中,当确定主控制器(HGS)的功能障碍时,自动驾驶操作从车辆(F)借助主控制器(HGS)沿正常理想运动轨迹(RST)被自动引导至预定目的地的正常操作模式被切换至车辆(F)借助副控制器(NGS)沿紧急操作‑理想运动轨迹(NBS)被自动引导至急停位置(NP)的紧急操作模式。正常操作模式中,在固定于车辆的主控制器(HGS)坐标系({x,y})中连续确定正常理想运动轨迹(RST)、紧急操作‑理想运动轨迹(NBS)和车辆(F)所行
用于调节车辆运动的方法和用于执行该方法的装置.pdf
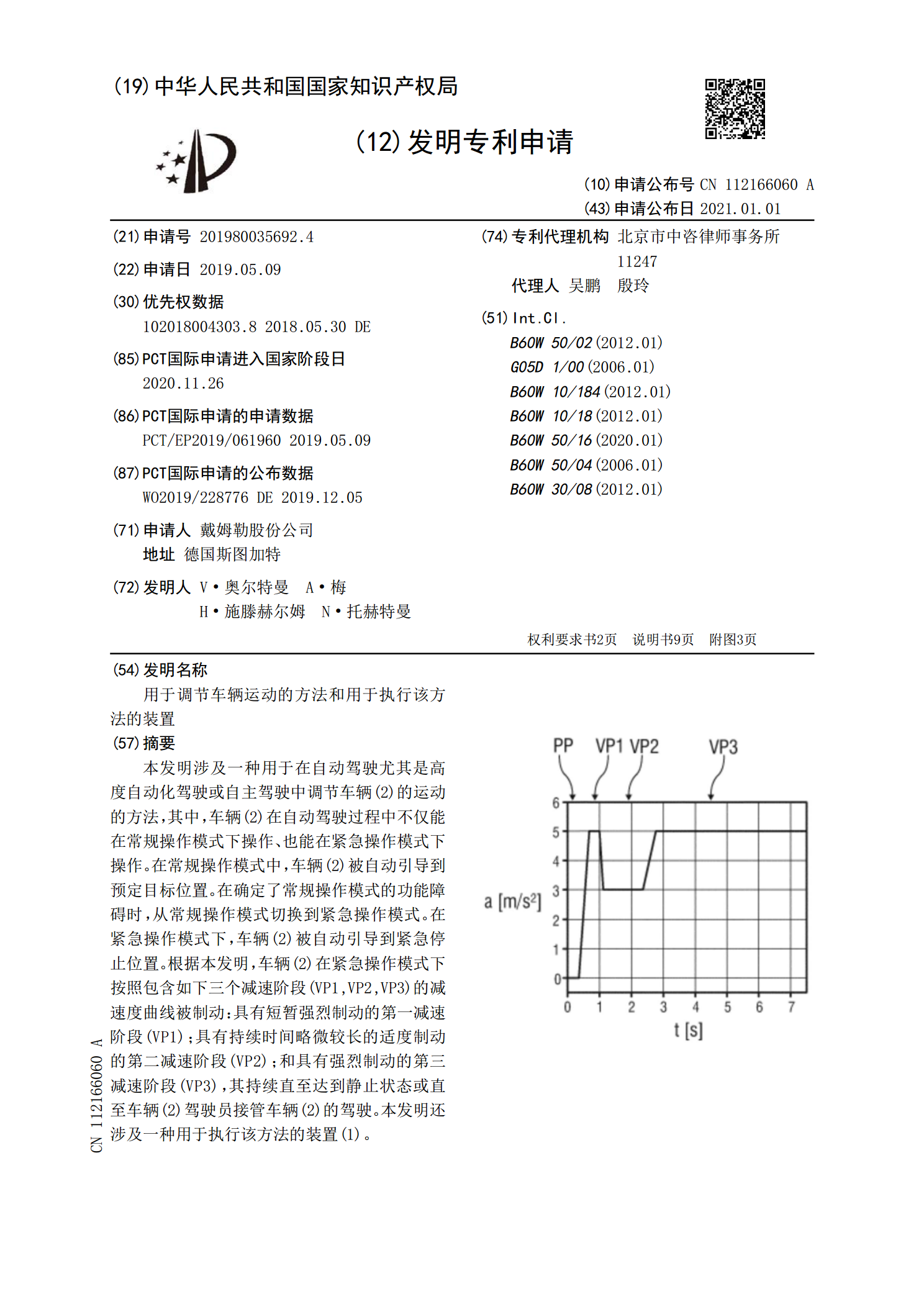
本发明涉及一种用于在自动驾驶尤其是高度自动化驾驶或自主驾驶中调节车辆(2)的运动的方法,其中,车辆(2)在自动驾驶过程中不仅能在常规操作模式下操作、也能在紧急操作模式下操作。在常规操作模式中,车辆(2)被自动引导到预定目标位置。在确定了常规操作模式的功能障碍时,从常规操作模式切换到紧急操作模式。在紧急操作模式下,车辆(2)被自动引导到紧急停止位置。根据本发明,车辆(2)在紧急操作模式下按照包含如下三个减速阶段(VP1,VP2,VP3)的减速度曲线被制动:具有短暂强烈制动的第一减速阶段(VP1);具有持续时

用于控制车辆的为执行自动驾驶而设立的车辆系统的方法及用于执行该方法的装置.pdf
本发明涉及一种用于控制车辆(1)的为执行自动驾驶而设立的车辆系统(9)的方法,其中,所述车辆(1)被定位,并且其中,所述车辆系统(9)根据定位结果被许用以激活。根据本发明,使用至少两种不同的定位方法(LML,LMG)定位该车辆(1),其中,所述至少两种定位方法(LML,LMG)包括至少一种基于地标的定位方法(LML)和基于至少一个全球导航卫星系统的定位方法(LMG)。仅当用每种所用的定位方法(LML,LMG)均确认车辆(1)处在针对自动驾驶被许用的路线段(FS)时,车辆系统(9)才被允许激活。本发明还涉及

用于控制自动驾驶车辆的方法和装置.pdf
本发明涉及一种借助车辆控制中心(2)控制自动驾驶车辆(1)的方法和装置,其中,在车辆侧采集的传感器信号(S)被传输给该车辆控制中心(2)并且借助该车辆控制中心(2)依据该传感器信号(S)对车辆(1)进行控制。本发明规定,在车辆侧为相应的传感器信号(S)提供时间戳,其中,在收到相应传感器信号(S)时在车辆控制中心(2)内检查该时间戳,并且当传感器信号(S)的时间戳超过预先规定的的第一时效时,将其以带标记的形式显示给该车辆控制中心(2)的远程操作者以指示信号延迟,并且对时间戳超过预先规定的第二时效的传感器信号

用于运行车辆的辅助系统的方法、用于实施该方法的装置和车辆.pdf
本发明涉及一种用于运行车辆(1)的辅助系统的方法。根据本发明规定,在车辆(1)的自主行驶运行中,在下面的情况下借助于控制单元与所确定的通行高度无关地防止在障碍物的下方通行:障碍物被确定为由作业机械(2)承载的、伸入车辆(1)的行驶路线中或正在运动到该行驶路线中的载荷(4)。本发明还涉及用于实施该方法的装置和具有这种装置的车辆(1)。