
用于控制自动驾驶车辆的方法和装置.pdf

岚风****55


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于控制自动驾驶车辆的方法和装置.pdf
本发明涉及一种借助车辆控制中心(2)控制自动驾驶车辆(1)的方法和装置,其中,在车辆侧采集的传感器信号(S)被传输给该车辆控制中心(2)并且借助该车辆控制中心(2)依据该传感器信号(S)对车辆(1)进行控制。本发明规定,在车辆侧为相应的传感器信号(S)提供时间戳,其中,在收到相应传感器信号(S)时在车辆控制中心(2)内检查该时间戳,并且当传感器信号(S)的时间戳超过预先规定的的第一时效时,将其以带标记的形式显示给该车辆控制中心(2)的远程操作者以指示信号延迟,并且对时间戳超过预先规定的第二时效的传感器信号

自动驾驶车辆和用于自动驾驶车辆的控制方法.pdf
本发明提供了一种自动驾驶车辆和一种用于自动驾驶车辆的控制方法。该自动驾驶车辆包括用户检测监测装置和起动控制装置。用户检测监测装置在自动驾驶车辆停在目的地之后检测离开自动驾驶车辆的用户作为下车用户并且监测下车用户。起动控制装置在检测到下车用户之后、满足起动条件之前保持自动驾驶车辆的停止状态,并且在满足起动条件的情况下允许自动驾驶车辆的起动。所述起动条件是以下条件之一:指示下车用户至少移出自动驾驶车辆周围的移动判定区域的条件;和指示下车用户存在于移动判定区域中但在同一位置停留持续特定时长或更长时间的条件。

控制自动驾驶车辆的方法、装置、设备和自动驾驶车辆.pdf
本公开公开了一种控制自动驾驶车辆的方法、装置、设备、介质、产品和自动驾驶车辆,涉及人工智能领域,尤其涉及自动驾驶领域。控制自动驾驶车辆的方法包括:响应于接收到目标行驶需求数据,控制当前车辆行驶至与第一位置数据对应的第一位置,其中,目标行驶需求数据包括第一位置数据和第二位置数据;响应于确定当前行驶需求数据与目标行驶需求数据相关联,控制当前车辆基于目标行驶需求数据行驶至与第二位置数据对应的第二位置。
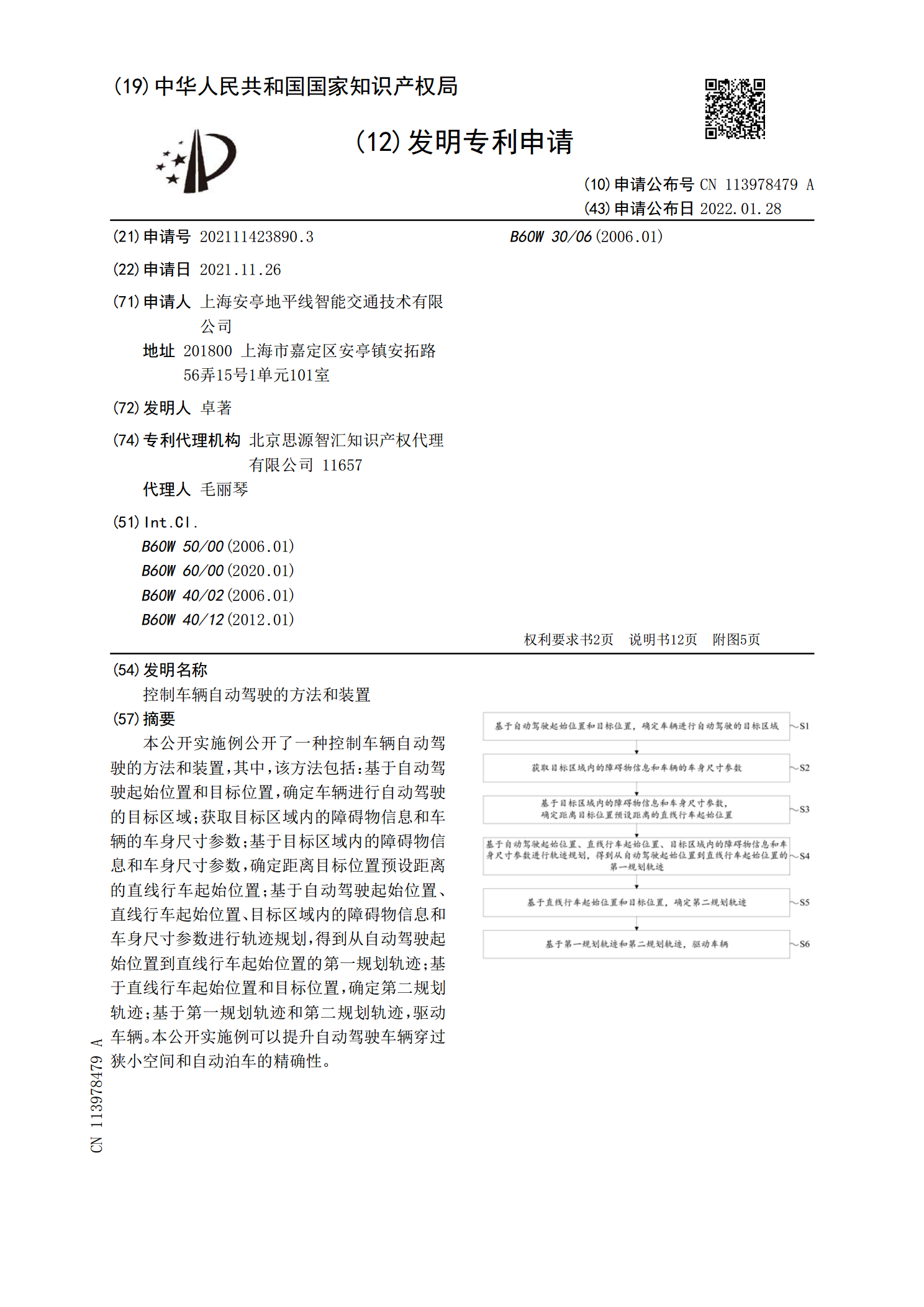
控制车辆自动驾驶的方法和装置.pdf
本公开实施例公开了一种控制车辆自动驾驶的方法和装置,其中,该方法包括:基于自动驾驶起始位置和目标位置,确定车辆进行自动驾驶的目标区域;获取目标区域内的障碍物信息和车辆的车身尺寸参数;基于目标区域内的障碍物信息和车身尺寸参数,确定距离目标位置预设距离的直线行车起始位置;基于自动驾驶起始位置、直线行车起始位置、目标区域内的障碍物信息和车身尺寸参数进行轨迹规划,得到从自动驾驶起始位置到直线行车起始位置的第一规划轨迹;基于直线行车起始位置和目标位置,确定第二规划轨迹;基于第一规划轨迹和第二规划轨迹,驱动车辆。本公
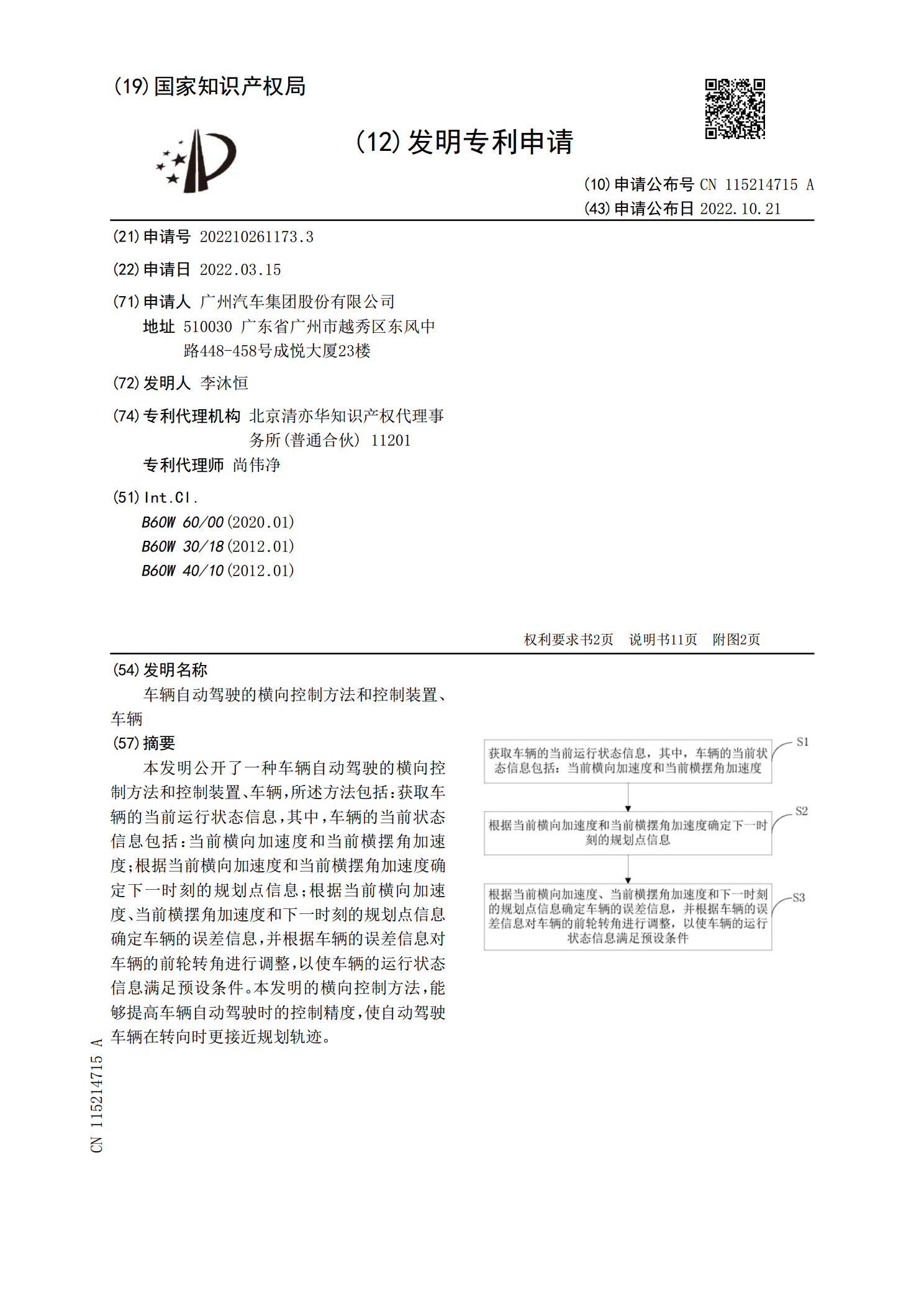
车辆自动驾驶的横向控制方法和控制装置、车辆.pdf
本发明公开了一种车辆自动驾驶的横向控制方法和控制装置、车辆,所述方法包括:获取车辆的当前运行状态信息,其中,车辆的当前状态信息包括:当前横向加速度和当前横摆角加速度;根据当前横向加速度和当前横摆角加速度确定下一时刻的规划点信息;根据当前横向加速度、当前横摆角加速度和下一时刻的规划点信息确定车辆的误差信息,并根据车辆的误差信息对车辆的前轮转角进行调整,以使车辆的运行状态信息满足预设条件。本发明的横向控制方法,能够提高车辆自动驾驶时的控制精度,使自动驾驶车辆在转向时更接近规划轨迹。