
用于操作车辆辅助系统的方法和装置以及车辆.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于操作车辆辅助系统的方法和装置以及车辆.pdf
本发明涉及一种用于操作车辆(1)的辅助系统的方法和装置,其中,检测车辆(1)将要行驶经过的侧向静止物体和侧向动态物体以作为侧向边界物(B),其中,检测出车辆(1)距相应侧向边界物(B)的相应侧向距离,其中,确定相应侧向动态物体的速度,且至少对相应侧向动态物体根据其类型进行分类。在车辆(1)的控制单元中存有如下特性曲线组,其特性曲线(K1‑K5)分别配属于依据侧向边界物预先设定的环境状况,其中,借助针对相应环境状况的相应特性曲线(K1‑K5)来预先确定:在相对于侧向边界物的不同侧向距离下,车辆(1)应该以多
用于控制车辆的装置和方法以及车辆的雷达系统.pdf
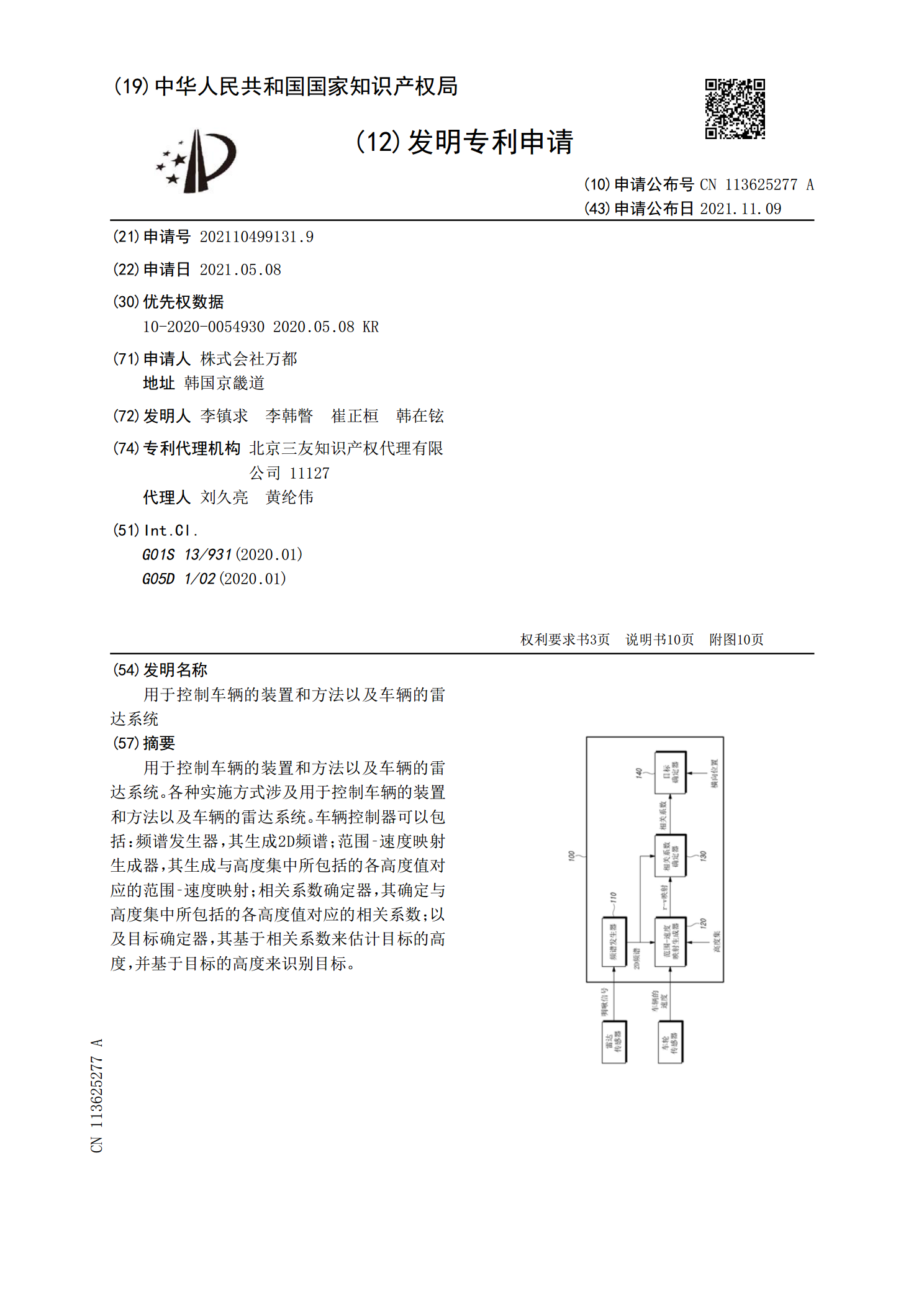
用于控制车辆的装置和方法以及车辆的雷达系统。各种实施方式涉及用于控制车辆的装置和方法以及车辆的雷达系统。车辆控制器可以包括:频谱发生器,其生成2D频谱;范围‑速度映射生成器,其生成与高度集中所包括的各高度值对应的范围‑速度映射;相关系数确定器,其确定与高度集中所包括的各高度值对应的相关系数;以及目标确定器,其基于相关系数来估计目标的高度,并基于目标的高度来识别目标。
用于车辆辅助驾驶的控制方法、装置、系统、介质和车辆.pdf
本发明涉及车辆的控制技术,具体地涉及一种用于车辆辅助驾驶的控制方法、装置、系统、存储介质和车辆。所述方法包括下述步骤:接收影像调取命令,该影像调取命令包括第一命令和第二命令;在接收到第一命令的情况下,调取车辆的盲区影像;在接收到第二命令的情况下,关闭车辆的盲区影像。本发明提出的用于车辆辅助驾驶的控制方案使得驾驶员在驾驶过程中能够全面掌握车辆侧边的盲区情况,从而提高驾驶安全性能,降低安全隐患。

用于运行车辆的辅助系统的方法、用于实施该方法的装置和车辆.pdf
本发明涉及一种用于运行车辆(1)的辅助系统的方法。根据本发明规定,在车辆(1)的自主行驶运行中,在下面的情况下借助于控制单元与所确定的通行高度无关地防止在障碍物的下方通行:障碍物被确定为由作业机械(2)承载的、伸入车辆(1)的行驶路线中或正在运动到该行驶路线中的载荷(4)。本发明还涉及用于实施该方法的装置和具有这种装置的车辆(1)。
用于处理车辆轮胎的方法、装置和系统以及车辆轮胎.pdf
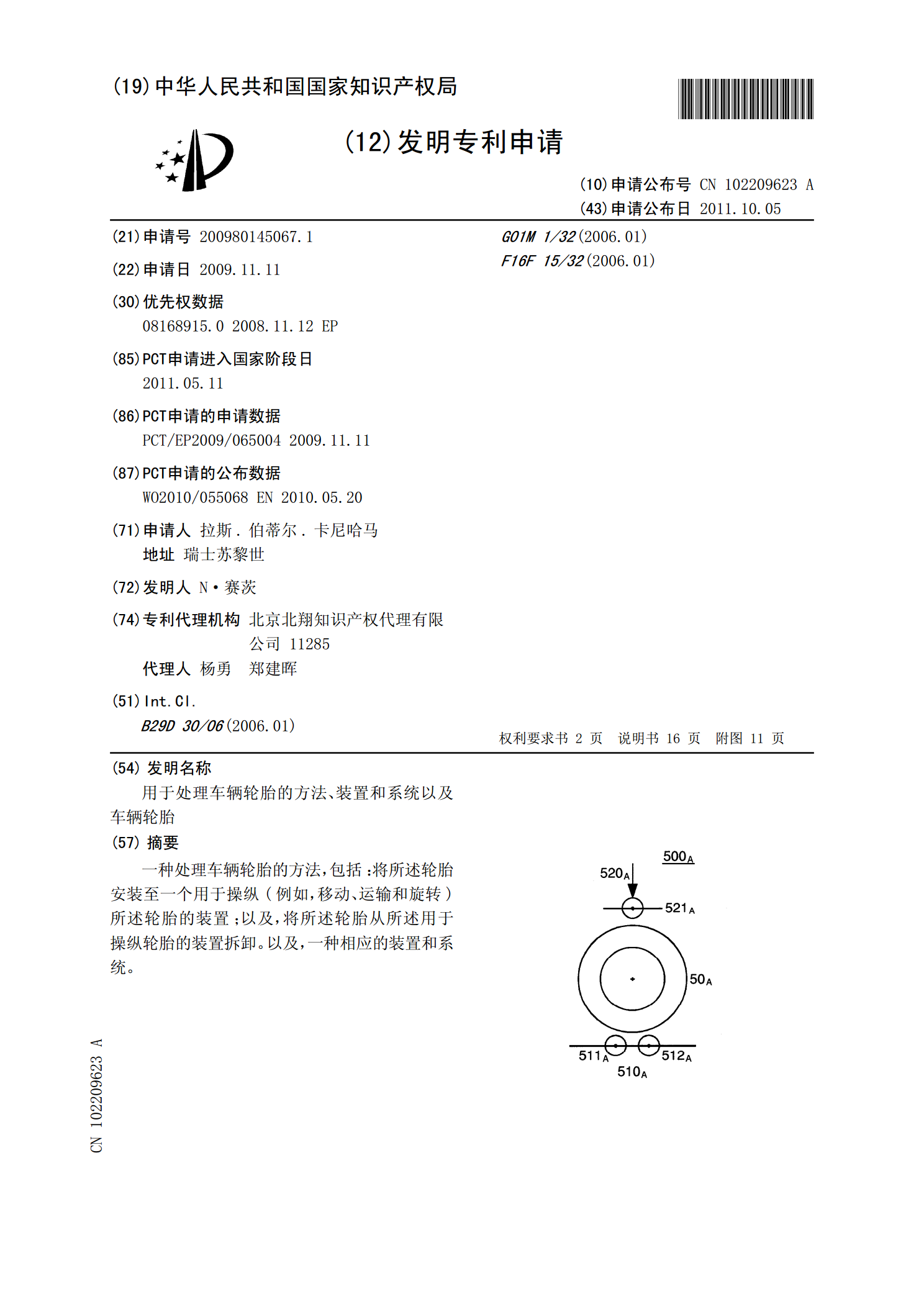
一种处理车辆轮胎的方法,包括:将所述轮胎安装至一个用于操纵(例如,移动、运输和旋转)所述轮胎的装置;以及,将所述轮胎从所述用于操纵轮胎的装置拆卸。以及,一种相应的装置和系统。