
雷达信号处理方法和雷达信号处理装置.pdf

佳晨****ng

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达信号处理方法和雷达信号处理装置.pdf
一种雷达信号处理方法和装置,方法包括:获取多路RX信号,对多路RX信号中的每一路RX信号进行距离维谱分析和多普勒维谱分析,得到RD图(S310);根据目标跟踪先验信息,对每一路RX信号的RD图进行相干处理,对多路RX信号的相干处理后的RD图进行相干叠加(S320);根据多路RX信号相干叠加后的RD图,进行目标检测(S330);方法基于目标跟踪先验信息对多路RX信号的RDmap进行相干处理进而进行相干叠加,可以提高RX信号的合并增益,即相干处理和相干叠加能够使得叠加的接收信号相位尽可能符合相干条件,使得叠

雷达信号处理装置、雷达装置及雷达信号处理方法.pdf
碰撞判定部(404)在车辆(1000)与物体(1001)之间的多普勒速度分量变化了第1基准值为止时、或车辆(1000)移动至与第1基准值对应的距离(R)时,判定车辆(1000)是否相对于物体(1001)发生碰撞。

雷达装置、信号处理装置和信号处理方法.pdf
为了提供一种TDMAFMCWMIMO雷达装置,其能够补偿移动目标的多普勒相移,并提高估计方位的精度。[解决方案]提供了一种雷达装置,该雷达装置:以参考时间为中心以天线元件的编号前后对称的方式依次切换而允许所述发送天线执行发送;并且由在参考时间之前由所述接收天线接收的第一拍频信号和在所述参考时间之后接收的第二拍频信号合成在参考时间的拍频信号。

雷达装置和雷达信号处理方法.pdf
提供了一种雷达装置和一种雷达信号处理方法。所述雷达装置包括:多个发射天线;多个非均匀且线性部署的接收天线;传感器信号处理器,其被配置成在顺序驱动多个发射天线的同时根据虚拟天线基于从接收天线布置输入的信号来计算目标距离‑多普勒数据;以及目标位置计算器,其被配置成基于布置映射数据来计算目标的位置数据,所述布置映射数据是通过参考天线配置相关信息重新布置从传感器信号处理器输出的虚拟天线特定距离‑多普勒数据而获得的。
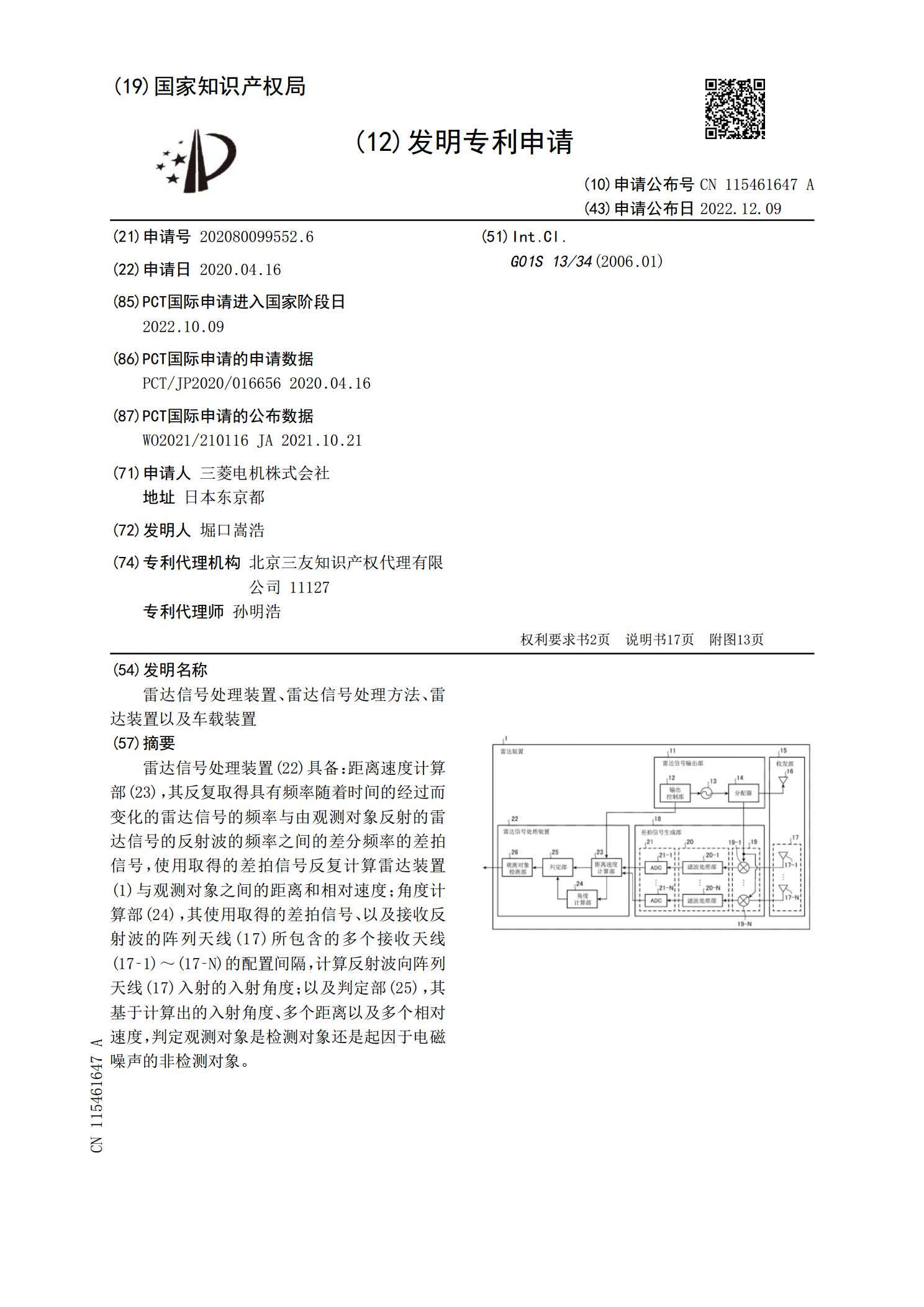
雷达信号处理装置、雷达信号处理方法、雷达装置以及车载装置.pdf
雷达信号处理装置(22)具备:距离速度计算部(23),其反复取得具有频率随着时间的经过而变化的雷达信号的频率与由观测对象反射的雷达信号的反射波的频率之间的差分频率的差拍信号,使用取得的差拍信号反复计算雷达装置(1)与观测对象之间的距离和相对速度;角度计算部(24),其使用取得的差拍信号、以及接收反射波的阵列天线(17)所包含的多个接收天线(17?1)~(17?N)的配置间隔,计算反射波向阵列天线(17)入射的入射角度;以及判定部(25),其基于计算出的入射角度、多个距离以及多个相对速度,判定观测对象是检测