
移动机器人摆臂履带驱动装置.pdf

书生****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

移动机器人摆臂履带驱动装置.pdf
一种移动机器人摆臂履带驱动装置,包括:中空轴谐波减速机、履带驱动结构和摆臂驱动结构,履带驱动结构的驱动轴设置于中空轴谐波减速机内,摆臂驱动结构设置于中空轴谐波减速机外,摆臂驱动结构与履带驱动结构同轴驱动以分别输出转动效果;中空轴谐波减速机包括:中空输入轴、谐波减速机固定端和谐波减速机输出端,中空输入轴与谐波减速机输出端相啮合,谐波减速机固定端与谐波减速机输出端相接触。本发明传动结构简单,外形尺寸紧凑;利用大减速比的谐波减速机来驱动摆臂结构,极大提高了摆臂的负载能力;摆臂履带同轴驱动,综合了履带结构驱动力大

一种履带机器人摆臂驱动装置.pdf
一种履带机器人摆臂驱动装置,包括设置在履带机器人行走空心从动轴内部的摆臂直流伺服电机,所述履带机器人行走空心从动轴的内侧固定在车体侧板上,摆臂直流伺服电机的输出转轴从履带机器人行走空心从动轴的外侧伸出,通过键和紧定螺钉与摆臂板后端转轴连接;所述摆臂板前端与摆臂从动轮的轴连接在一起。本发明采用摆臂直流伺服电机直接驱动摆臂转动的设计,与传统的传动机构相比有以下优点:摆臂直流伺服电机直接驱动简化了传动机构,降低了传动故障率,减轻了摆臂装置的重量,降低了系统的能耗;摆臂直流伺服电机完全包含在行走空心从动轴内,提高
一种履带机器人摆臂驱动装置.pdf
本发明公开了一种履带机器人摆臂驱动装置,包括履带机器人主体和履带装置,所述履带机器人主体设置于履带装置的上方,所述履带装置内的一端两侧均设置有主动轮,所述主动轮前侧的内设置有两排行走轮,所述主动轮的转动轴连接有驱动装置,且驱动装置安装于履带机器人主体的内部,所述主动轮与两排行走轮相互平行,远离主动轮的一排行走轮外侧通过联轴器连接有摆臂主体。本发明采用驱动电机控制摆臂主体的旋转,使得摆臂主体可在机器人主体的两侧伸出和收回,能够根据情况改变跨越障碍的能力,实现了地面移动机器人的小型化、轻型化;简化了传动机构,

一种履带摆臂及其涨紧装置.pdf
本发明涉及一种履带车的摆臂机构,尤其涉及一种履带摆臂及其涨紧装置,包括内侧大轮、履带、外侧大轮、摆动臂、外侧小轮、内侧小轮和涨紧装置,所述涨紧装置主要由涨紧条、摆动轴承座、摆动支撑轴和涨紧螺钉组成,所述摆动臂的一端开有U型槽,U型槽的槽口方向为沿摆动臂主轴方向向外,所述涨紧条安装在摆动臂上并靠近U型槽,所述涨紧螺钉螺纹连接在涨紧条上的螺孔内。本发明不仅可以在改变履带和带轮的齿合度,还为履带的安装和拆卸带来了极大的方便。
一种伺服驱动双摆臂装置.pdf
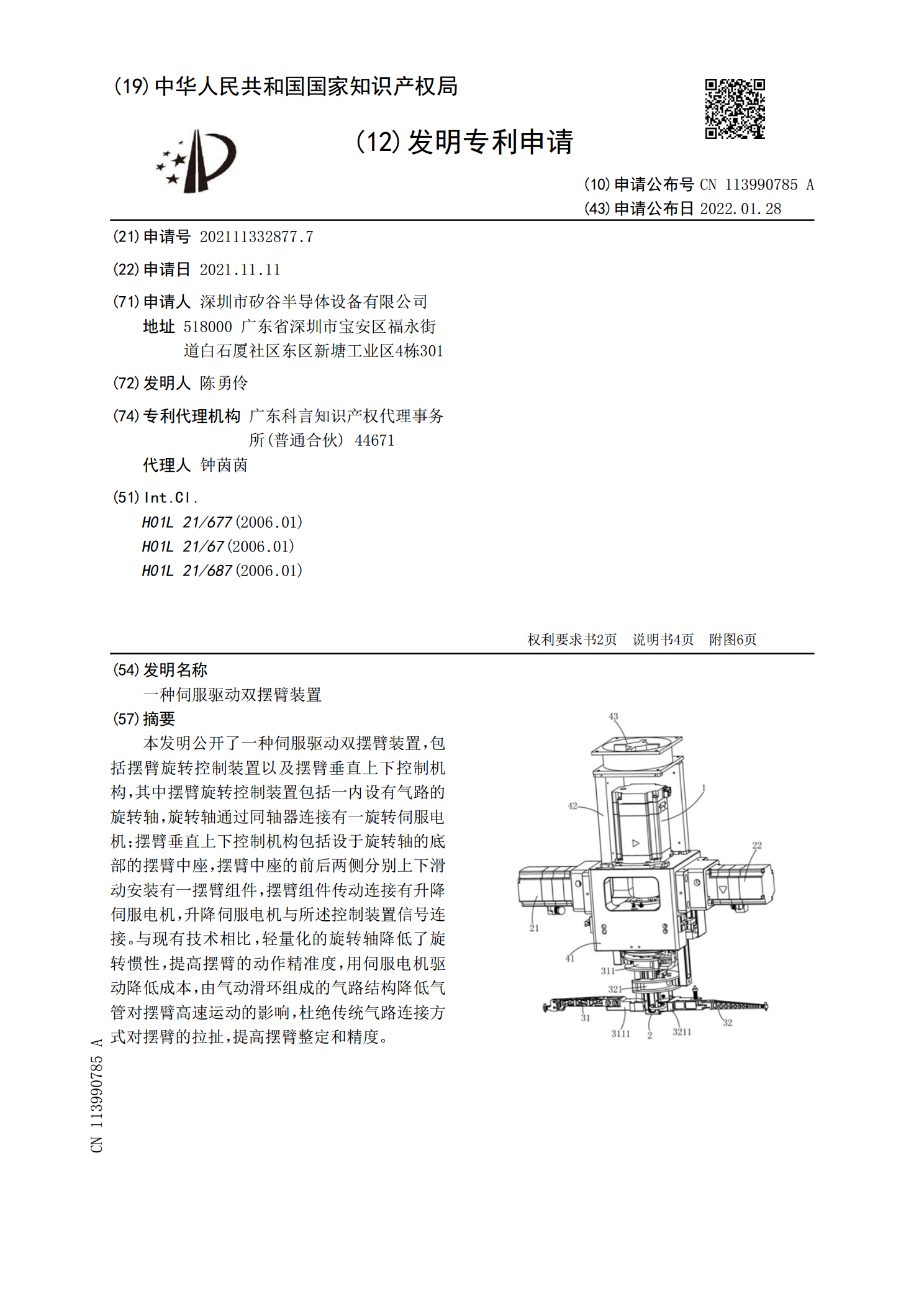
本发明公开了一种伺服驱动双摆臂装置,包括摆臂旋转控制装置以及摆臂垂直上下控制机构,其中摆臂旋转控制装置包括一内设有气路的旋转轴,旋转轴通过同轴器连接有一旋转伺服电机;摆臂垂直上下控制机构包括设于旋转轴的底部的摆臂中座,摆臂中座的前后两侧分别上下滑动安装有一摆臂组件,摆臂组件传动连接有升降伺服电机,升降伺服电机与所述控制装置信号连接。与现有技术相比,轻量化的旋转轴降低了旋转惯性,提高摆臂的动作精准度,用伺服电机驱动降低成本,由气动滑环组成的气路结构降低气管对摆臂高速运动的影响,杜绝传统气路连接方式对摆臂的拉