
爬壁机器人.pdf

猫巷****松臣


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

爬壁机器人.pdf
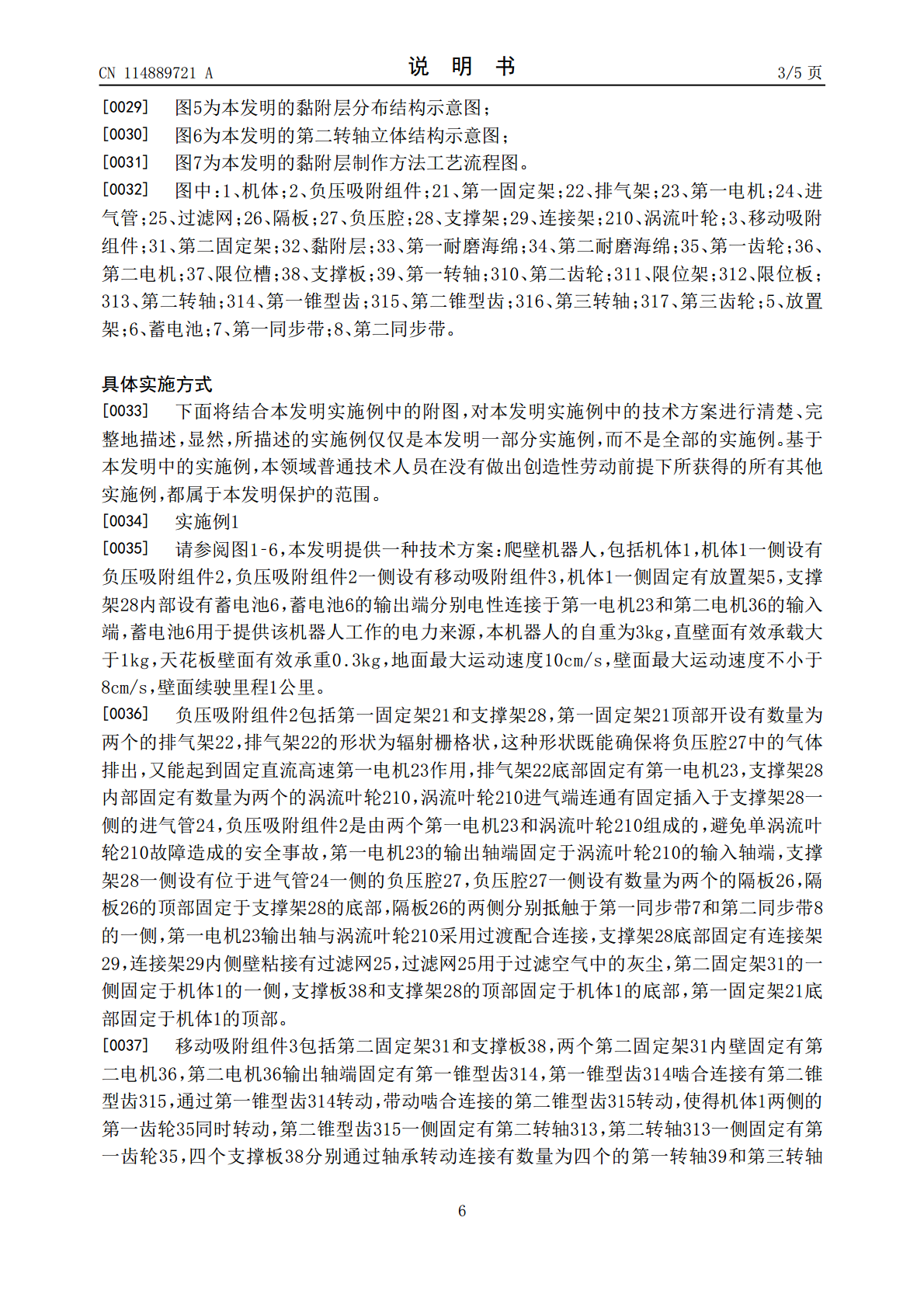
本发明公开了爬壁机器人,包括机体,机体一侧设有负压吸附组件,负压吸附组件一侧设有移动吸附组件,移动吸附组件包括第二固定架和支撑板,两个第二固定架内壁固定有第二电机,第二电机输出轴端固定有第一锥型齿,第一锥型齿啮合连接有第二锥型齿,爬壁机器人在粗糙壁面爬行时,第一耐磨海绵和第二耐磨海绵可模仿生物吸盘边缘肌肉与壁面的密封机理,实现与壁面凸凹颗粒相互交错进而有效避免了外界空气的进入,保证了负压腔内部的真空;始终在形成一个动态负压腔,机器人实现了与水平面呈0‑360°的多种复杂光滑与粗糙壁面的爬行,减少了负压腔与
爬壁机器人.pdf
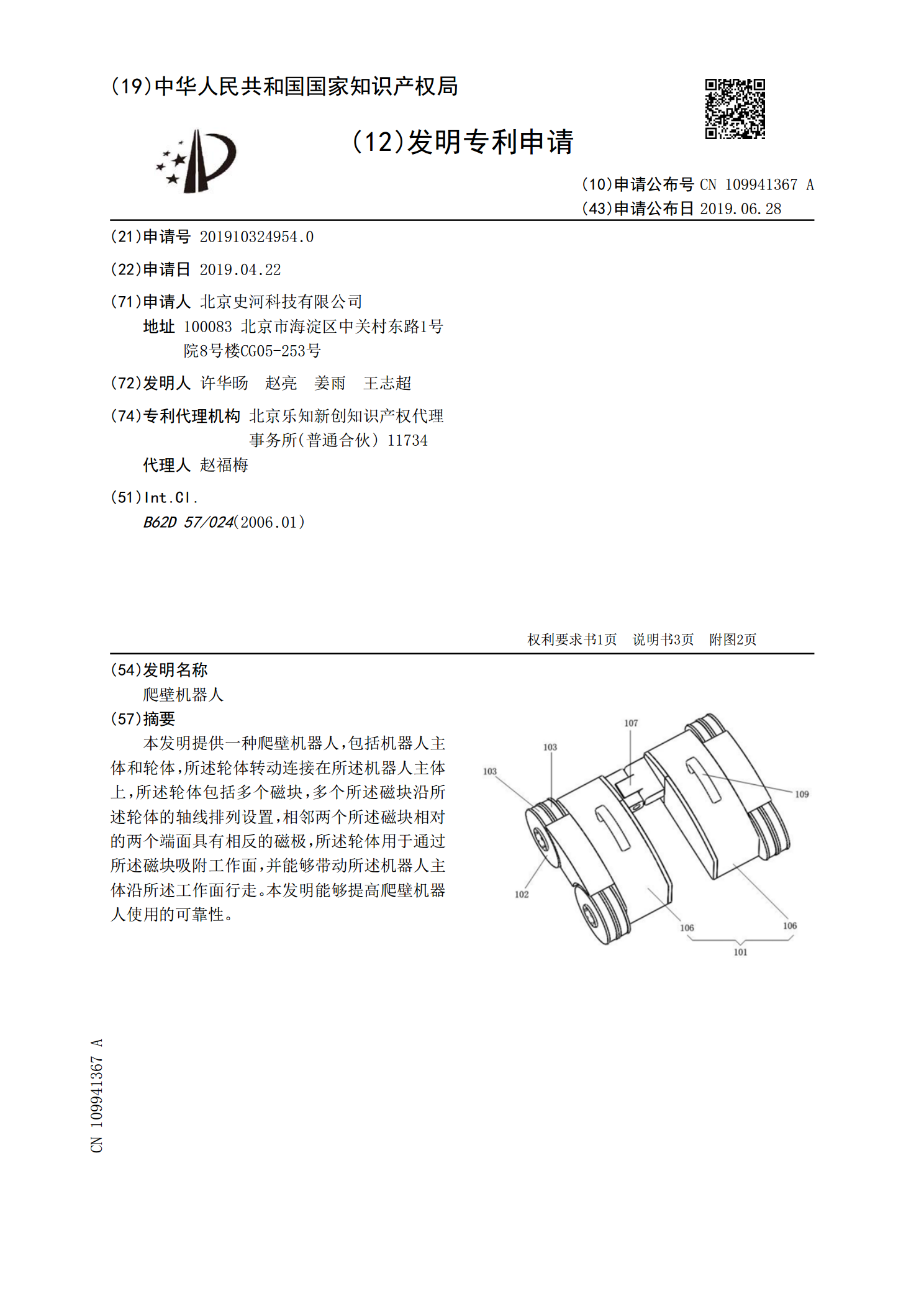
本发明提供一种爬壁机器人,包括机器人主体和轮体,所述轮体转动连接在所述机器人主体上,所述轮体包括多个磁块,多个所述磁块沿所述轮体的轴线排列设置,相邻两个所述磁块相对的两个端面具有相反的磁极,所述轮体用于通过所述磁块吸附工作面,并能够带动所述机器人主体沿所述工作面行走。本发明能够提高爬壁机器人使用的可靠性。
爬壁机器人.pdf
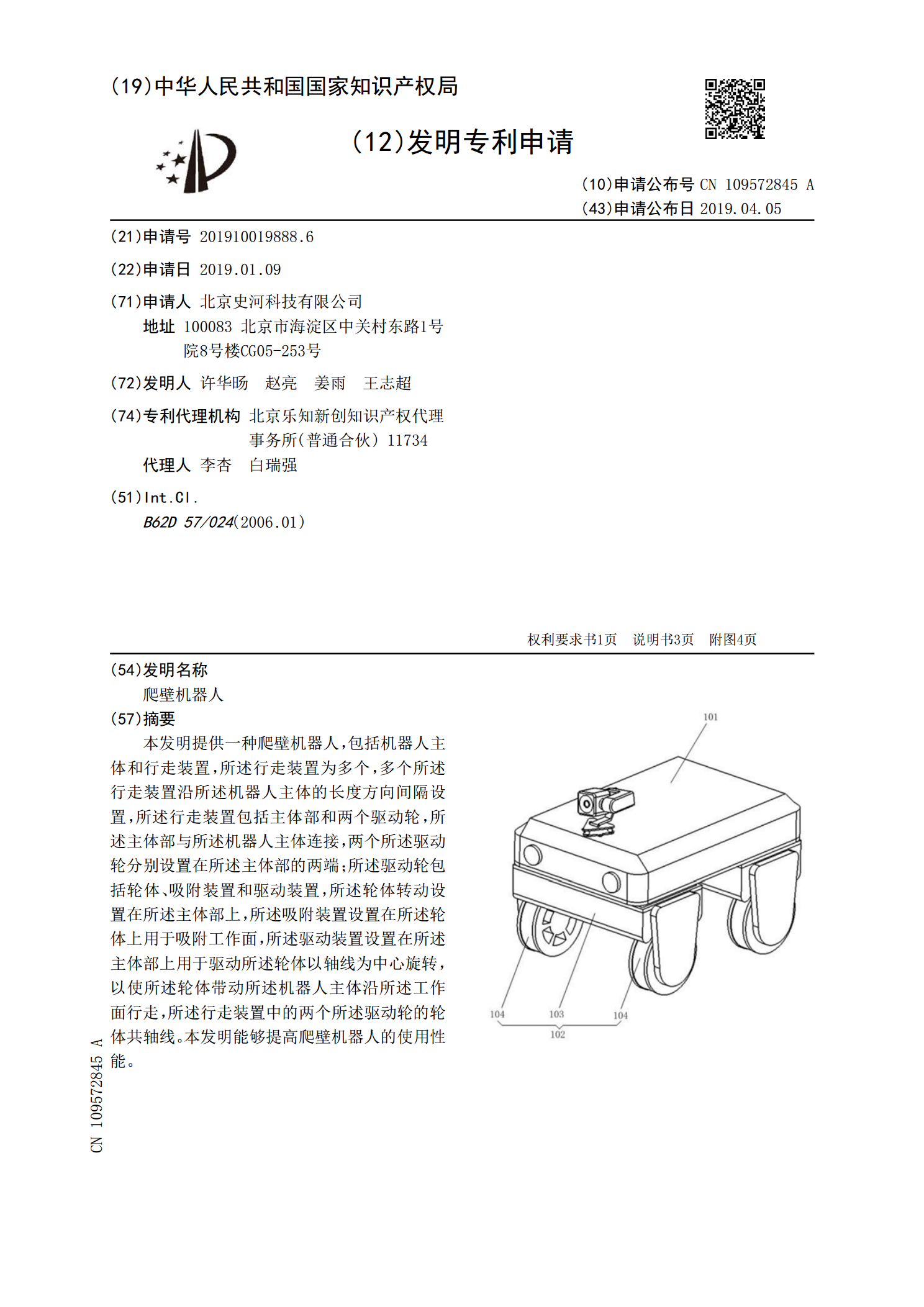
本发明提供一种爬壁机器人,包括机器人主体和行走装置,所述行走装置为多个,多个所述行走装置沿所述机器人主体的长度方向间隔设置,所述行走装置包括主体部和两个驱动轮,所述主体部与所述机器人主体连接,两个所述驱动轮分别设置在所述主体部的两端;所述驱动轮包括轮体、吸附装置和驱动装置,所述轮体转动设置在所述主体部上,所述吸附装置设置在所述轮体上用于吸附工作面,所述驱动装置设置在所述主体部上用于驱动所述轮体以轴线为中心旋转,以使所述轮体带动所述机器人主体沿所述工作面行走,所述行走装置中的两个所述驱动轮的轮体共轴线。本发
爬壁机器人.pdf
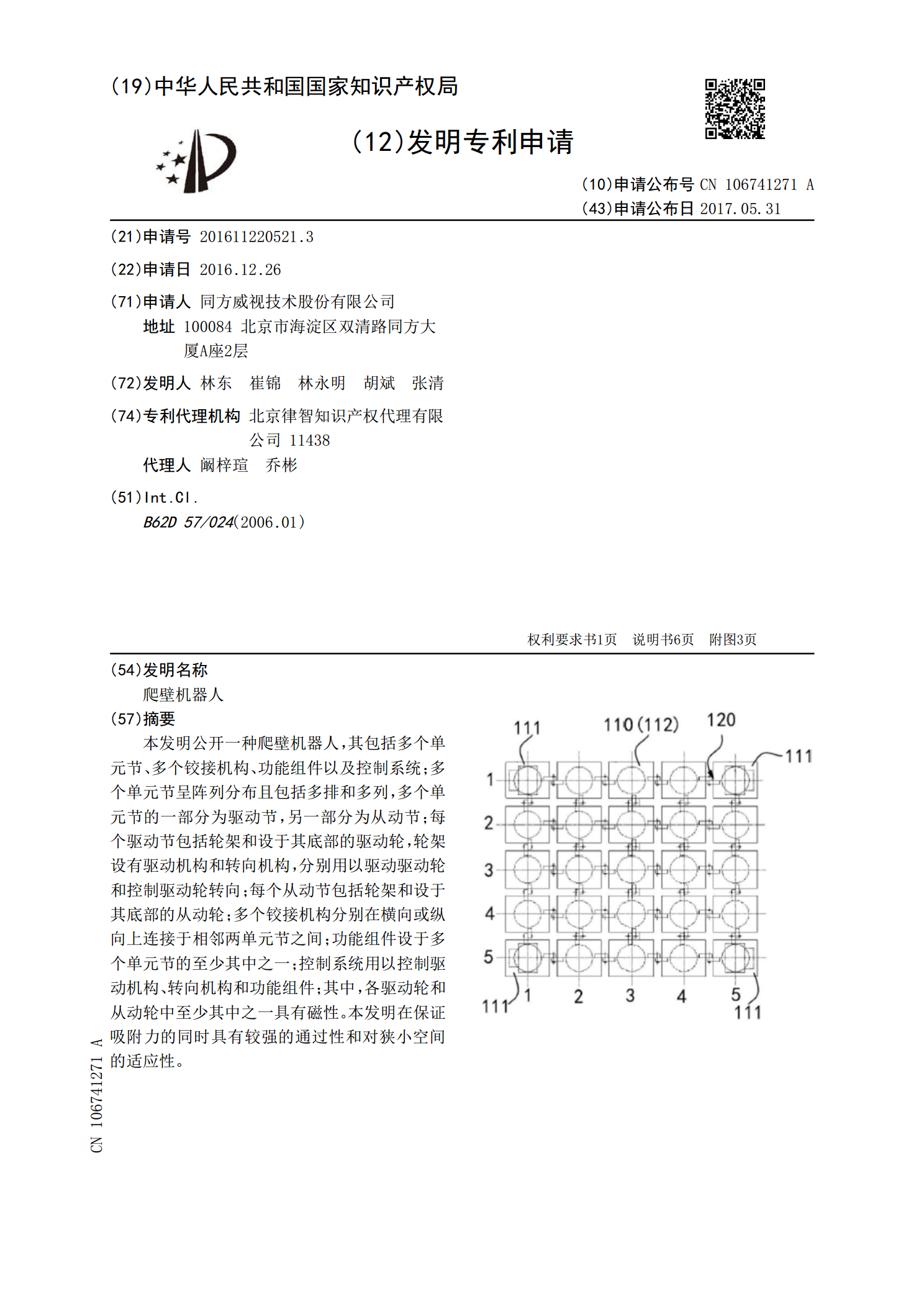
本发明公开一种爬壁机器人,其包括多个单元节、多个铰接机构、功能组件以及控制系统;多个单元节呈阵列分布且包括多排和多列,多个单元节的一部分为驱动节,另一部分为从动节;每个驱动节包括轮架和设于其底部的驱动轮,轮架设有驱动机构和转向机构,分别用以驱动驱动轮和控制驱动轮转向;每个从动节包括轮架和设于其底部的从动轮;多个铰接机构分别在横向或纵向上连接于相邻两单元节之间;功能组件设于多个单元节的至少其中之一;控制系统用以控制驱动机构、转向机构和功能组件;其中,各驱动轮和从动轮中至少其中之一具有磁性。本发明在保证吸附力
爬壁机器人.pdf
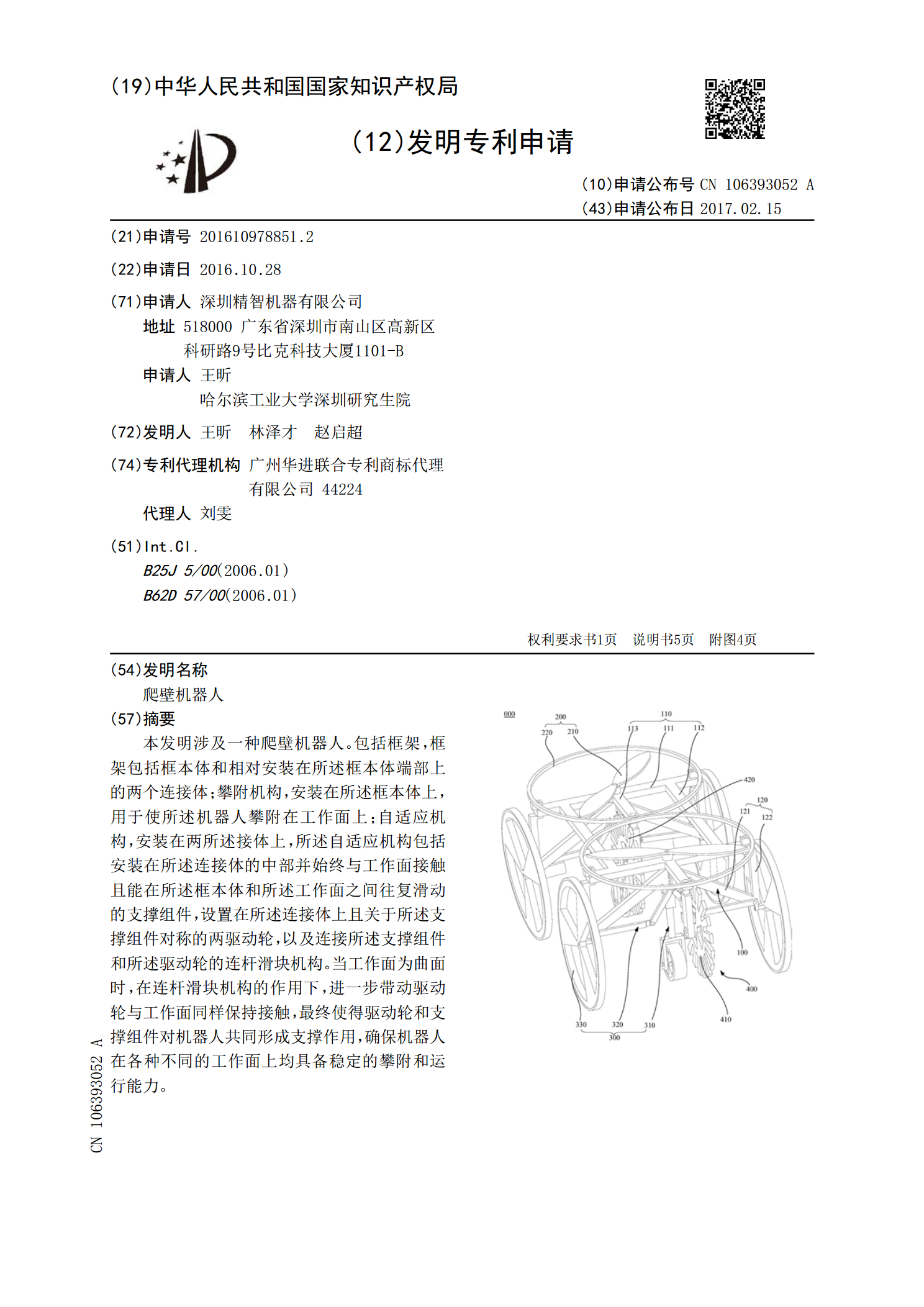
本发明涉及一种爬壁机器人。包括框架,框架包括框本体和相对安装在所述框本体端部上的两个连接体;攀附机构,安装在所述框本体上,用于使所述机器人攀附在工作面上;自适应机构,安装在两所述接体上,所述自适应机构包括安装在所述连接体的中部并始终与工作面接触且能在所述框本体和所述工作面之间往复滑动的支撑组件,设置在所述连接体上且关于所述支撑组件对称的两驱动轮,以及连接所述支撑组件和所述驱动轮的连杆滑块机构。当工作面为曲面时,在连杆滑块机构的作用下,进一步带动驱动轮与工作面同样保持接触,最终使得驱动轮和支撑组件对机器人共