
一种罐筒体双枪卧式环、纵缝焊机的跟踪装置.pdf

白凡****12


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种罐筒体双枪卧式环、纵缝焊机的跟踪装置.pdf
本发明涉及一种焊接装置,更具体地,本发明涉及一种应用于罐筒体双枪卧式环、纵缝焊机的机械跟踪装置。本发明主要由跟踪滚轮(1)、滚轮轴(2)、滚轮支架(3)、左右旋螺杆(4)、锁紧薄螺母(5)、连接螺钉(6)、弹簧下调节螺杆(7)、支座套锁紧螺钉(8)、跟踪拉伸弹簧(9)、弹簧套管(10)、锁紧薄螺母(11)、弹簧上调节螺杆(12)、抬起气缸(13)、直线滑轨及滑块(14)、焊枪(15)、三维十字微调机构(16)等零配件组成。能实现环、纵缝焊接的跟踪。同时,因为采用机械的方法检测焊缝,不会对焊机的正常工作产生

一种应用于罐筒体环、纵缝焊机的传动系统.pdf
本发明涉及一种焊接装置系统,更具体地,本发明涉及一种应用于多规格罐筒体的可变速环、纵缝焊机的传动系统。主要由传动装置、凸轮摆动装置、回转主轴及对中定位卡盘四部分组成。其中,所述传动装置包括蜗轮蜗杆传动(2)、两组齿轮切换装置(4-5)、驱动电机和减速机(1)等三部分。其中,所述凸轮摆动装置主要由凸轮装置(7)、凸轮手柄(配锁紧手柄)(8)、限位调节螺钉(9)和摆动定位板(10)四部分组成。本发明通过实现齿轮传动比切换,改变传动系统的转速比,使其实现相当于1∶30的转速比功能,以满足不同罐筒体直径对焊接速度
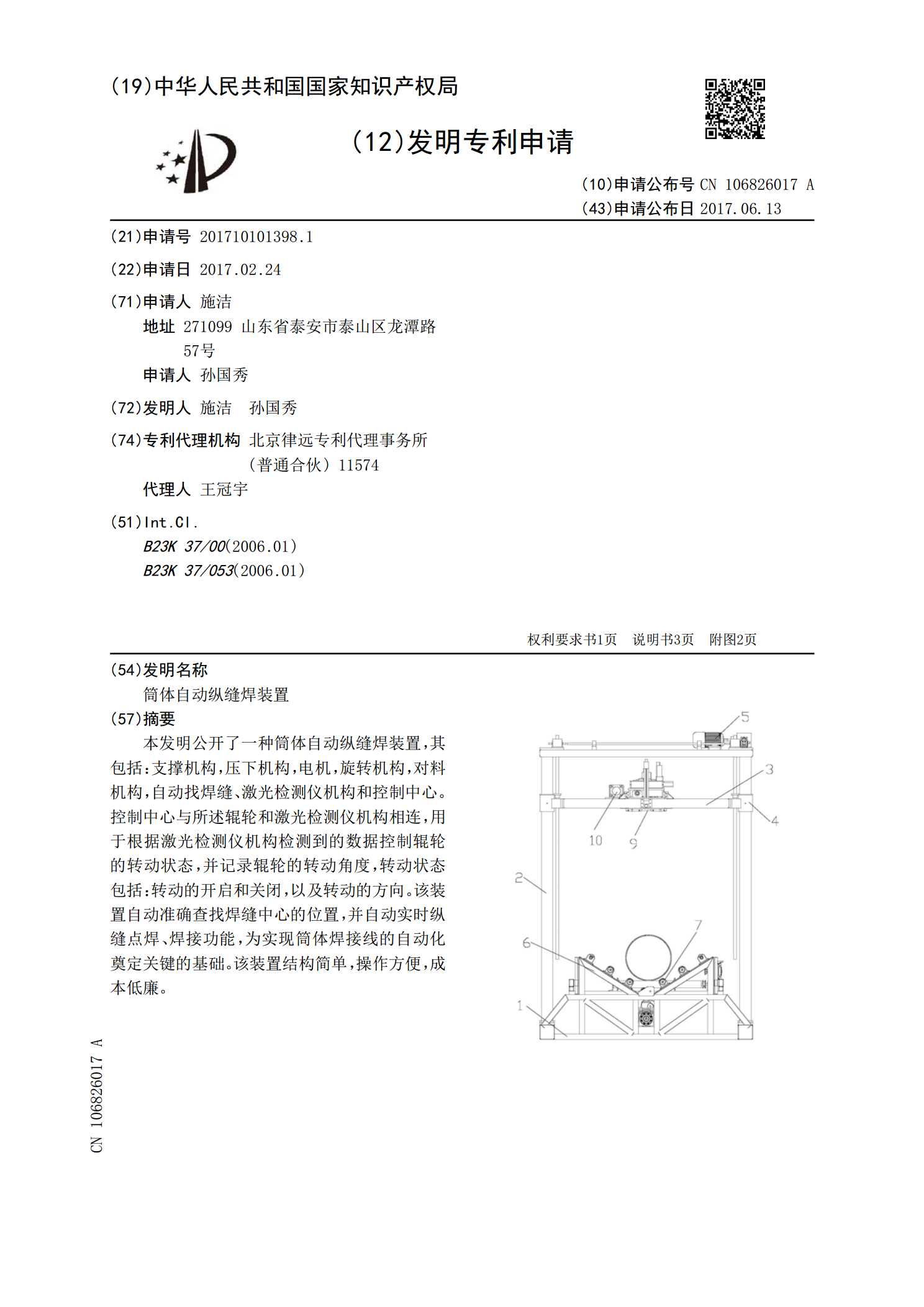
筒体自动纵缝焊装置.pdf
本发明公开了一种筒体自动纵缝焊装置,其包括:支撑机构,压下机构,电机,旋转机构,对料机构,自动找焊缝、激光检测仪机构和控制中心。控制中心与所述辊轮和激光检测仪机构相连,用于根据激光检测仪机构检测到的数据控制辊轮的转动状态,并记录辊轮的转动角度,转动状态包括:转动的开启和关闭,以及转动的方向。该装置自动准确查找焊缝中心的位置,并自动实时纵缝点焊、焊接功能,为实现筒体焊接线的自动化奠定关键的基础。该装置结构简单,操作方便,成本低廉。
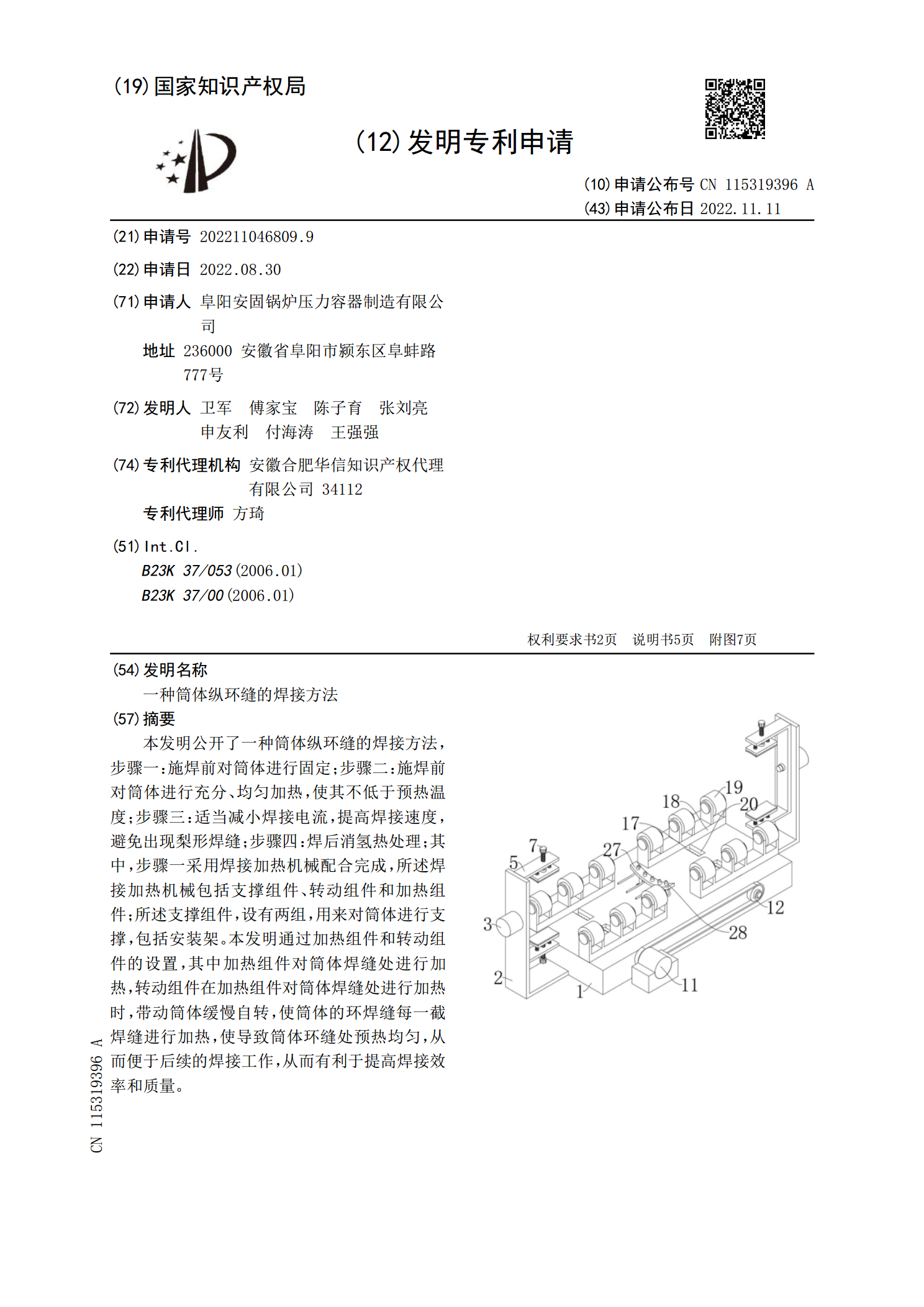
一种筒体纵环缝的焊接方法.pdf
本发明公开了一种筒体纵环缝的焊接方法,步骤一:施焊前对筒体进行固定;步骤二:施焊前对筒体进行充分、均匀加热,使其不低于预热温度;步骤三:适当减小焊接电流,提高焊接速度,避免出现梨形焊缝;步骤四:焊后消氢热处理;其中,步骤一采用焊接加热机械配合完成,所述焊接加热机械包括支撑组件、转动组件和加热组件;所述支撑组件,设有两组,用来对筒体进行支撑,包括安装架。本发明通过加热组件和转动组件的设置,其中加热组件对筒体焊缝处进行加热,转动组件在加热组件对筒体焊缝处进行加热时,带动筒体缓慢自转,使筒体的环焊缝每一截焊缝进
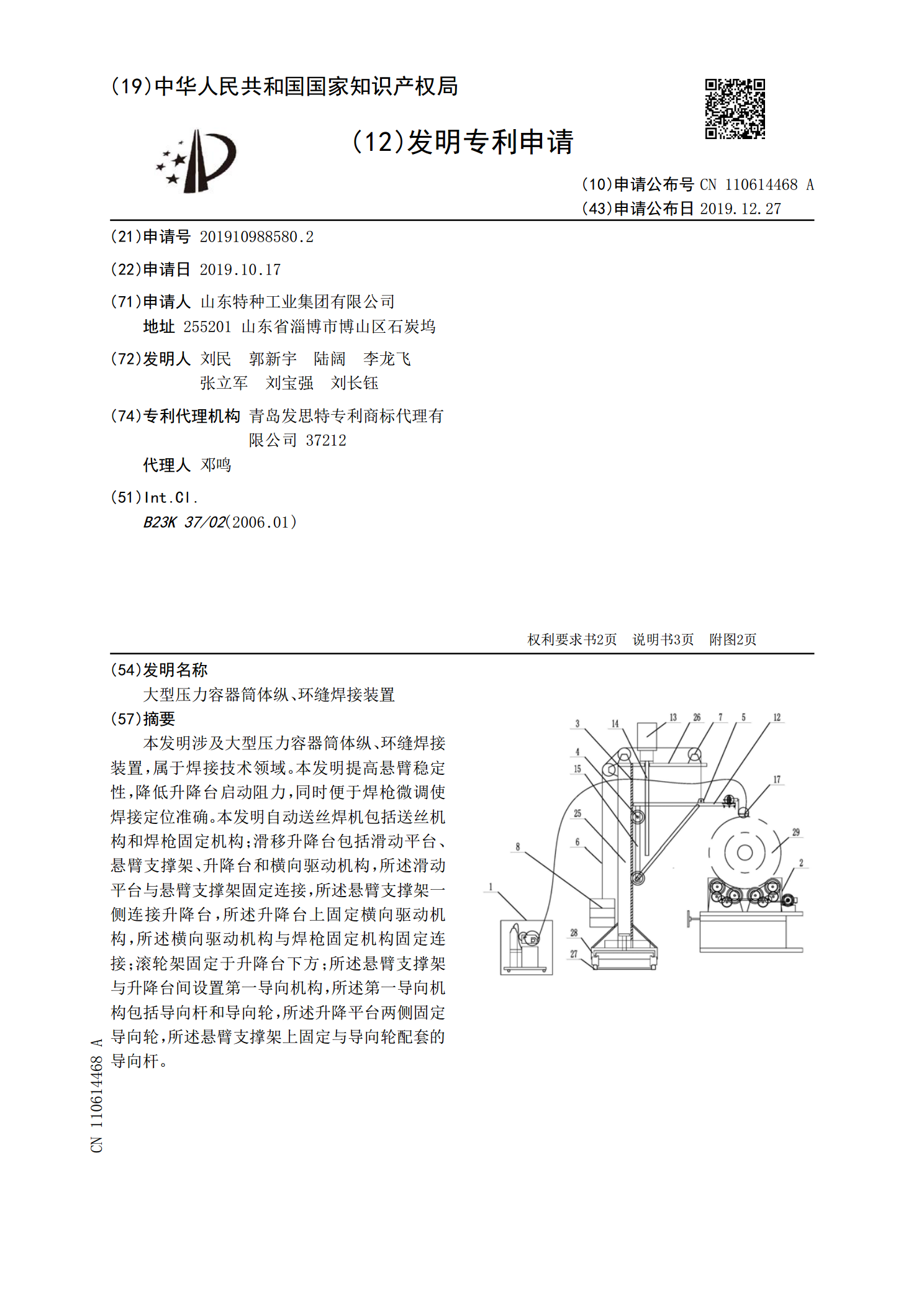
大型压力容器筒体纵、环缝焊接装置.pdf
本发明涉及大型压力容器筒体纵、环缝焊接装置,属于焊接技术领域。本发明提高悬臂稳定性,降低升降台启动阻力,同时便于焊枪微调使焊接定位准确。本发明自动送丝焊机包括送丝机构和焊枪固定机构;滑移升降台包括滑动平台、悬臂支撑架、升降台和横向驱动机构,所述滑动平台与悬臂支撑架固定连接,所述悬臂支撑架一侧连接升降台,所述升降台上固定横向驱动机构,所述横向驱动机构与焊枪固定机构固定连接;滚轮架固定于升降台下方;所述悬臂支撑架与升降台间设置第一导向机构,所述第一导向机构包括导向杆和导向轮,所述升降平台两侧固定导向轮,所述悬