
将电力牵引机连接到混合式车辆的方法和用于实现该方法的混合式车辆.pdf

Ch****75


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

将电力牵引机连接到混合式车辆的方法和用于实现该方法的混合式车辆.pdf
本发明涉及控制混合式车辆的方法,混合式车辆包括:具有发动机组(10)的牵引链,发动机组(10)具有通过变速箱(22)耦合到车轮(14,16)的热力发动机(18)以及可配置成用于向车提供牵引扭矩的电动机或用于通过车的电网(52)向电能储存装置(50)提供电流的发电机的电机ME(40);耦合设备(42),其插在电机和耦合到车轮(34,36)的驱动轴(48)之间,包括控制输入Ec以被置于确保电机(40)和驱动轴(48)之间的机械耦合的所谓耦合位置上或中断电机和驱动轴之间的机械耦合的去耦位置上;至少一个传感器(6

混合式车辆.pdf
一种用于混合式车辆的发动机控制设备设置有转换角检测装置(40)、角确定装置(步骤S101)、发动机载荷计算装置(步骤S102)和发动机控制装置(步骤S103)。所述转换角检测装置(40)检测凸轮(35)相对于曲柄轴(32)的旋转相位作为发动机(1)的可变气门操作机构(24)的测得转换角。所述角确定装置(步骤S101)确定所述测得转换角是否不同于当所述发动机(1)启动时的启动转换角。所述发动机载荷计算装置(步骤S102)在所述发动机(1)启动时所述测得转换角不同于所述启动转换角时根据所述测得转换角计算将要施
用于将拖车联接到牵引车辆的驾驶员辅助系统和方法.pdf
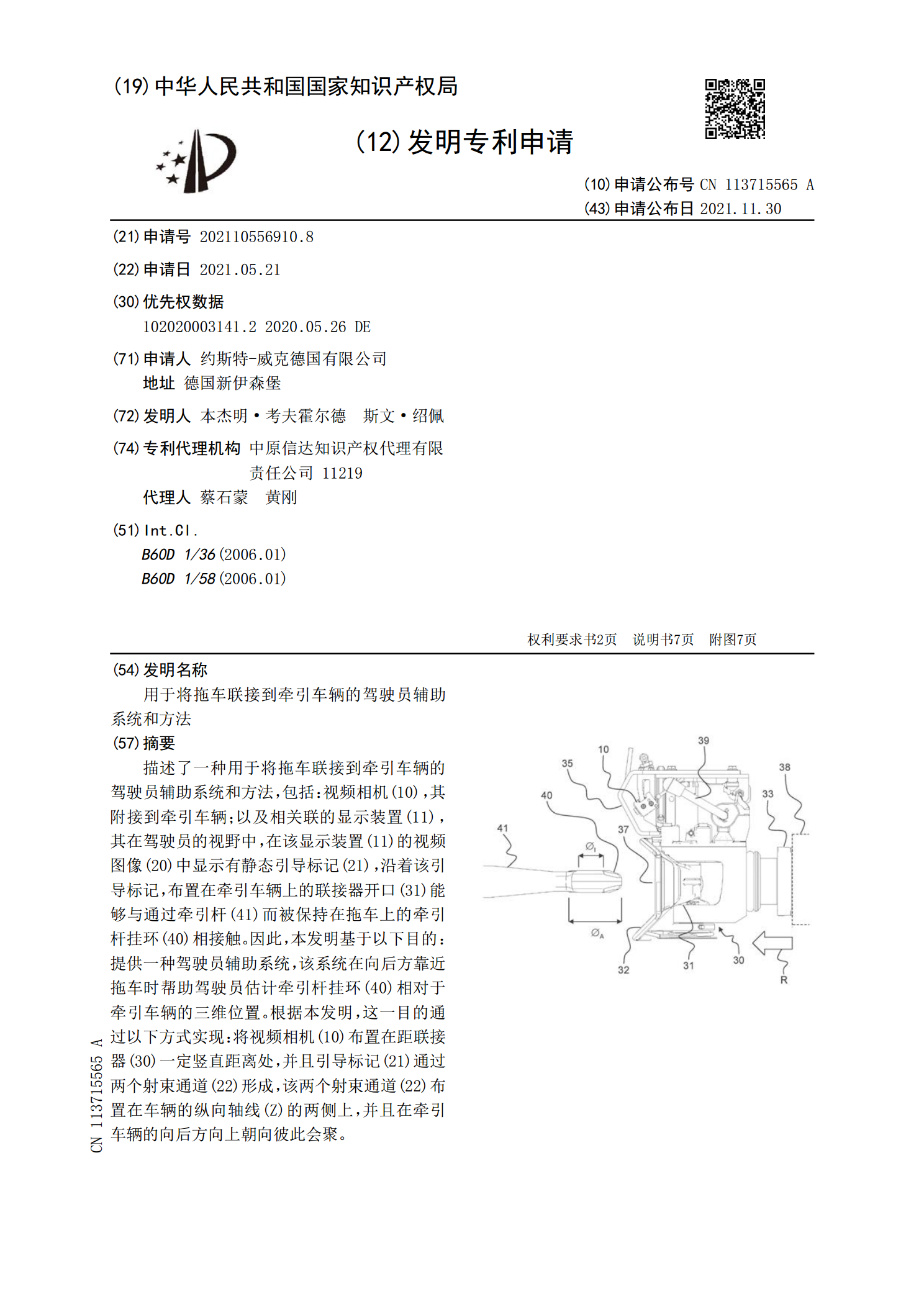
描述了一种用于将拖车联接到牵引车辆的驾驶员辅助系统和方法,包括:视频相机(10),其附接到牵引车辆;以及相关联的显示装置(11),其在驾驶员的视野中,在该显示装置(11)的视频图像(20)中显示有静态引导标记(21),沿着该引导标记,布置在牵引车辆上的联接器开口(31)能够与通过牵引杆(41)而被保持在拖车上的牵引杆挂环(40)相接触。因此,本发明基于以下目的:提供一种驾驶员辅助系统,该系统在向后方靠近拖车时帮助驾驶员估计牵引杆挂环(40)相对于牵引车辆的三维位置。根据本发明,这一目的通过以下方式实现:将

用于机动车辆的混合式变速器,以及控制方法.pdf
本发明涉及一种用于机动车辆的混合式变速器,该机动车辆装配有一台热力发动机以及一个用于驱动的电动机器(7),该变速器包括两个同轴的主轴(1,6),这些主轴各自具有用于在一个辅轴(10)上的至少一个中间传动装置(4,8,9),该辅轴是被连接到该车辆的车轮上的,其特征在于该变速器具有用于将这两个主轴(1,6)耦合在一起的一个第一装置(5),所述装置能够占据至少三个位置,即在该位置中:该热力发动机与将该电动机器(7)连接到这些车轮上的传动系解除耦合(位置1);该热力发动机在或不在该电动机器的帮助下驱动这些车轮(位
用于车辆的方法、用于车辆的设备和车辆.pdf
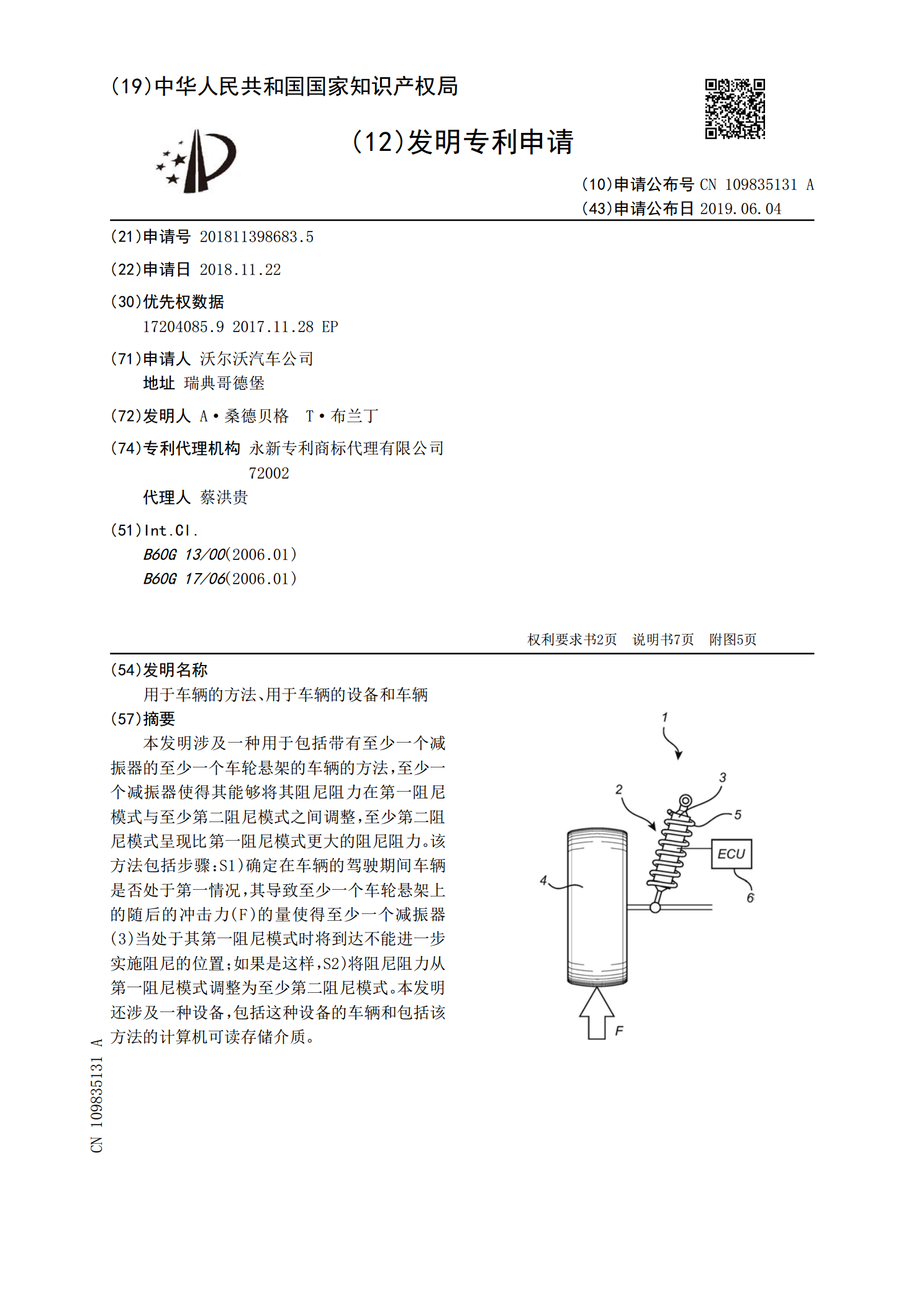
本发明涉及一种用于包括带有至少一个减振器的至少一个车轮悬架的车辆的方法,至少一个减振器使得其能够将其阻尼阻力在第一阻尼模式与至少第二阻尼模式之间调整,至少第二阻尼模式呈现比第一阻尼模式更大的阻尼阻力。该方法包括步骤:S1)确定在车辆的驾驶期间车辆是否处于第一情况,其导致至少一个车轮悬架上的随后的冲击力(F)的量使得至少一个减振器(3)当处于其第一阻尼模式时将到达不能进一步实施阻尼的位置;如果是这样,S2)将阻尼阻力从第一阻尼模式调整为至少第二阻尼模式。本发明还涉及一种设备,包括这种设备的车辆和包括该方法的