
全自动吹瓶机滑道变距机械手.pdf

一只****生物


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全自动吹瓶机滑道变距机械手.pdf
全自动吹瓶机滑道变距机械手,包括底板,底板上安装固定座,固定板上安装旋转气缸,旋转气缸连接滑动轴,滑动轴上设置移动块,移动块上安装管胚手指,管胚手指由手指气缸带动,其特征在于所述的底板上滑动设置移动板,移动板上安装齿条,在滑动轴上安装齿轮,齿轮与齿条相啮合,所述的移动板上制有变距滑道,移动块下安有滚轮,滚轮与变距滑道相配合。本方案采用齿轮齿条啮合翻转,通过滑道变距,使加热器中紧密排列的瓶胚通过变距机械手能准确的放入拉吹机中较宽排列的瓶胚支承座上,结构简单,动作稳定、可靠。

全自动吹瓶机环形输送瓶胚变距机构.pdf
全自动吹瓶机环形输送瓶胚变距机构,机架上的环形轨道安插瓶胚的滑动转轮组件,拉吹区域设置瓶胚变距机构,瓶胚变距机构包括机架的纵向滑动导轨座上安纵向滑动导轨有滑动配合的纵向滑动板,纵向滑动板上安横向滑动导轨上有滑动配合的横向滑动板由横向移动气缸带动,横向滑动板上设置甲、乙拨板连接块上各安甲、乙拨板,甲、乙拨板各有半圆形定位槽与滑动转轮组件接触,纵向滑动板的带动包括伺服电机带动主动链轮、链条和从动链轮,纵向滑动板连接在链条上,甲拨板连接块中安压缩弹簧,其右边与弹簧座接触,机架上安左限位块与甲拨板连接块接触,乙拨
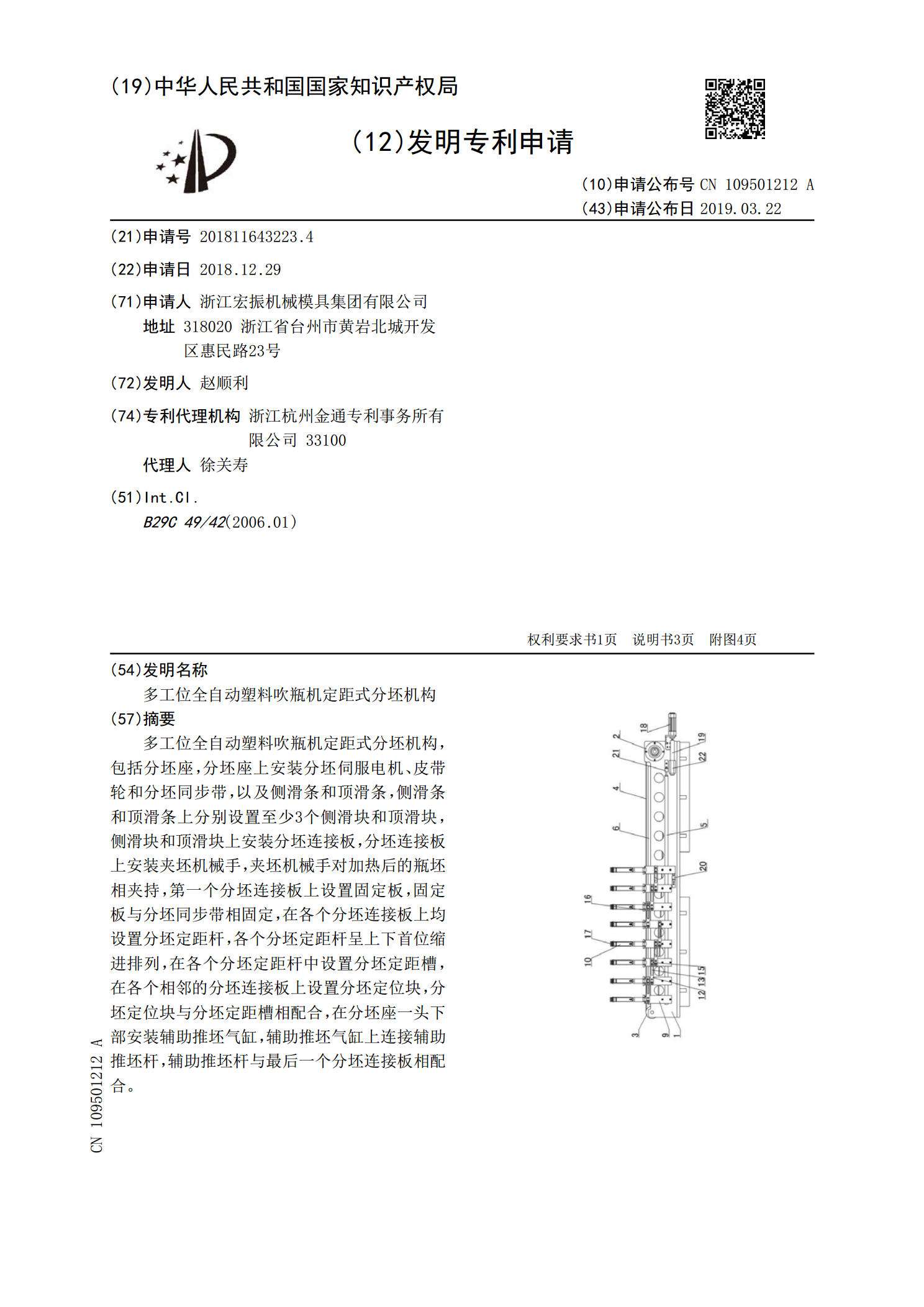
多工位全自动塑料吹瓶机定距式分坯机构.pdf
多工位全自动塑料吹瓶机定距式分坯机构,包括分坯座,分坯座上安装分坯伺服电机、皮带轮和分坯同步带,以及侧滑条和顶滑条,侧滑条和顶滑条上分别设置至少3个侧滑块和顶滑块,侧滑块和顶滑块上安装分坯连接板,分坯连接板上安装夹坯机械手,夹坯机械手对加热后的瓶坯相夹持,第一个分坯连接板上设置固定板,固定板与分坯同步带相固定,在各个分坯连接板上均设置分坯定距杆,各个分坯定距杆呈上下首位缩进排列,在各个分坯定距杆中设置分坯定距槽,在各个相邻的分坯连接板上设置分坯定位块,分坯定位块与分坯定距槽相配合,在分坯座一头下部安装辅助
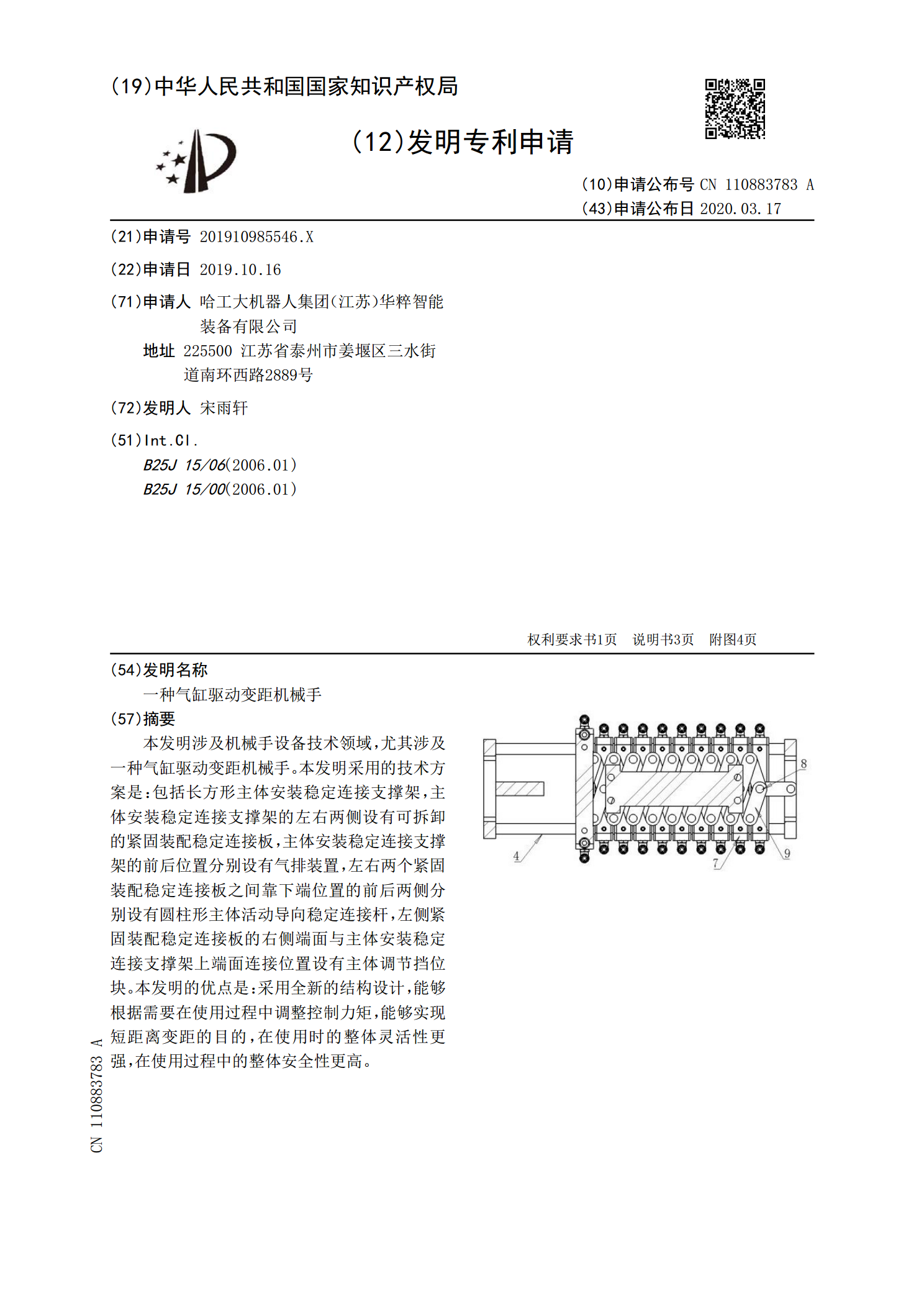
一种气缸驱动变距机械手.pdf
本发明涉及机械手设备技术领域,尤其涉及一种气缸驱动变距机械手。本发明采用的技术方案是:包括长方形主体安装稳定连接支撑架,主体安装稳定连接支撑架的左右两侧设有可拆卸的紧固装配稳定连接板,主体安装稳定连接支撑架的前后位置分别设有气排装置,左右两个紧固装配稳定连接板之间靠下端位置的前后两侧分别设有圆柱形主体活动导向稳定连接杆,左侧紧固装配稳定连接板的右侧端面与主体安装稳定连接支撑架上端面连接位置设有主体调节挡位块。本发明的优点是:采用全新的结构设计,能够根据需要在使用过程中调整控制力矩,能够实现短距离变距的目的
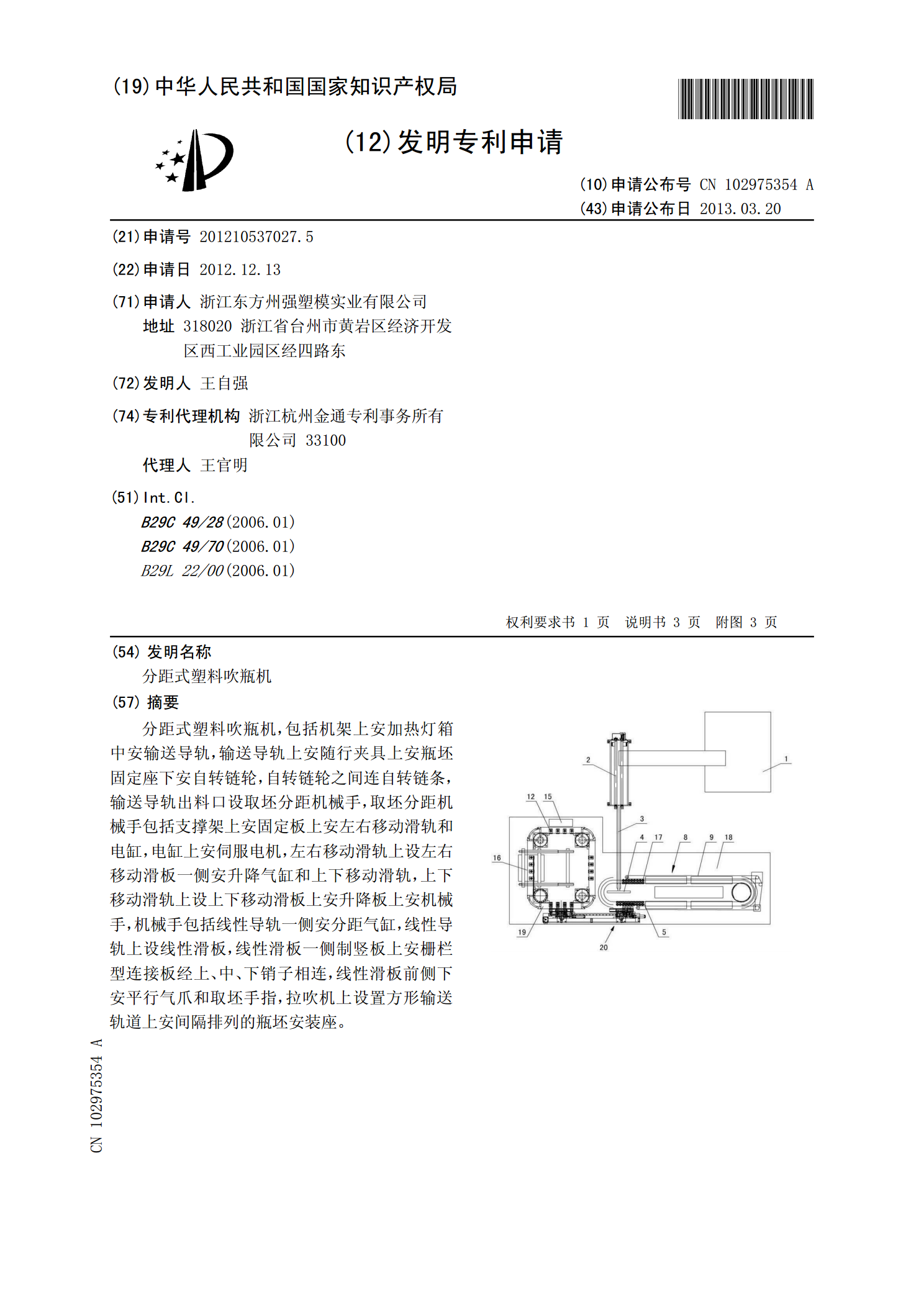
分距式塑料吹瓶机.pdf
分距式塑料吹瓶机,包括机架上安加热灯箱中安输送导轨,输送导轨上安随行夹具上安瓶坯固定座下安自转链轮,自转链轮之间连自转链条,输送导轨出料口设取坯分距机械手,取坯分距机械手包括支撑架上安固定板上安左右移动滑轨和电缸,电缸上安伺服电机,左右移动滑轨上设左右移动滑板一侧安升降气缸和上下移动滑轨,上下移动滑轨上设上下移动滑板上安升降板上安机械手,机械手包括线性导轨一侧安分距气缸,线性导轨上设线性滑板,线性滑板一侧制竖板上安栅栏型连接板经上、中、下销子相连,线性滑板前侧下安平行气爪和取坯手指,拉吹机上设置方形输送轨