
一种气缸驱动变距机械手.pdf

春波****公主


1/9

2/9
3/9
4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种气缸驱动变距机械手.pdf
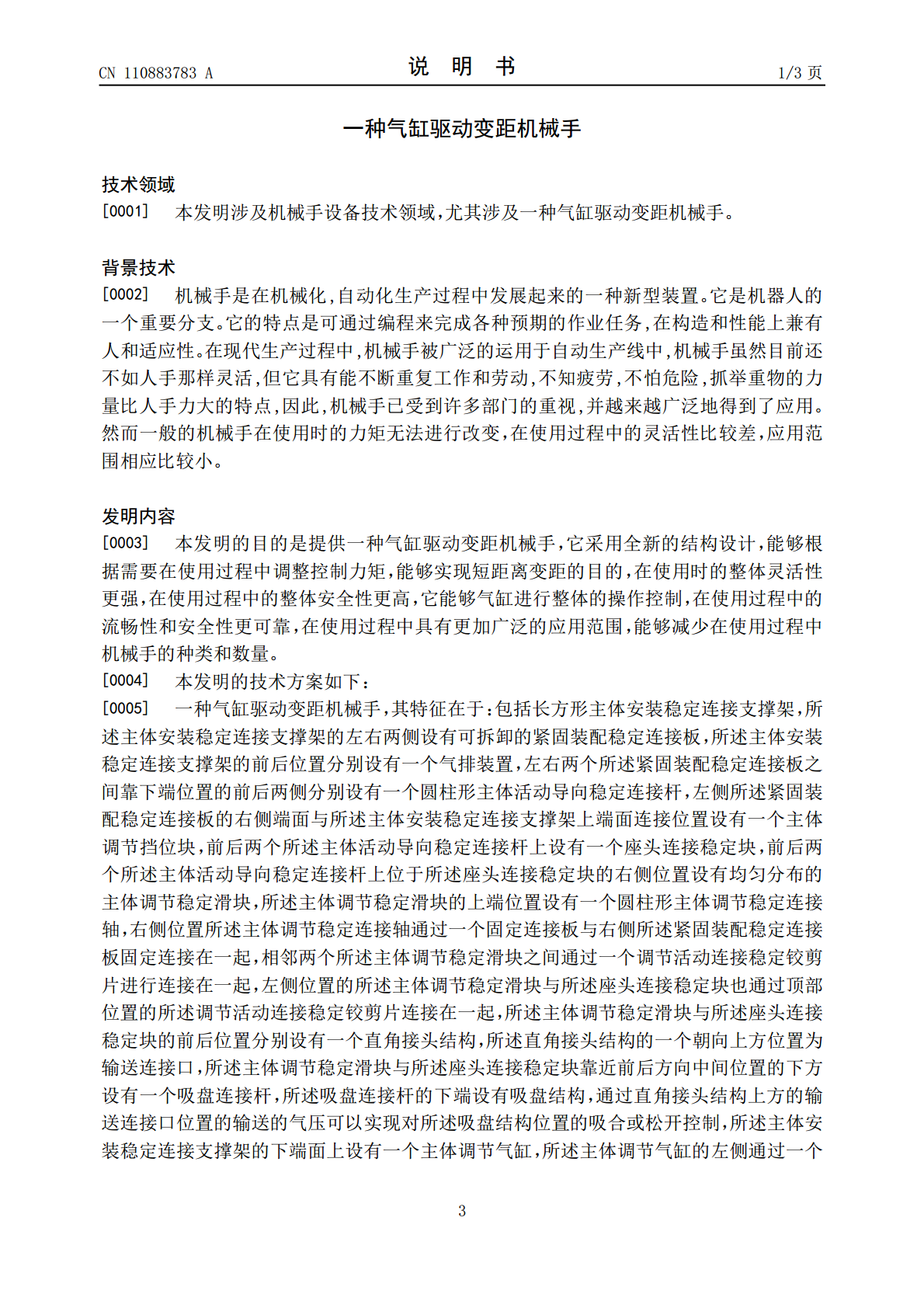
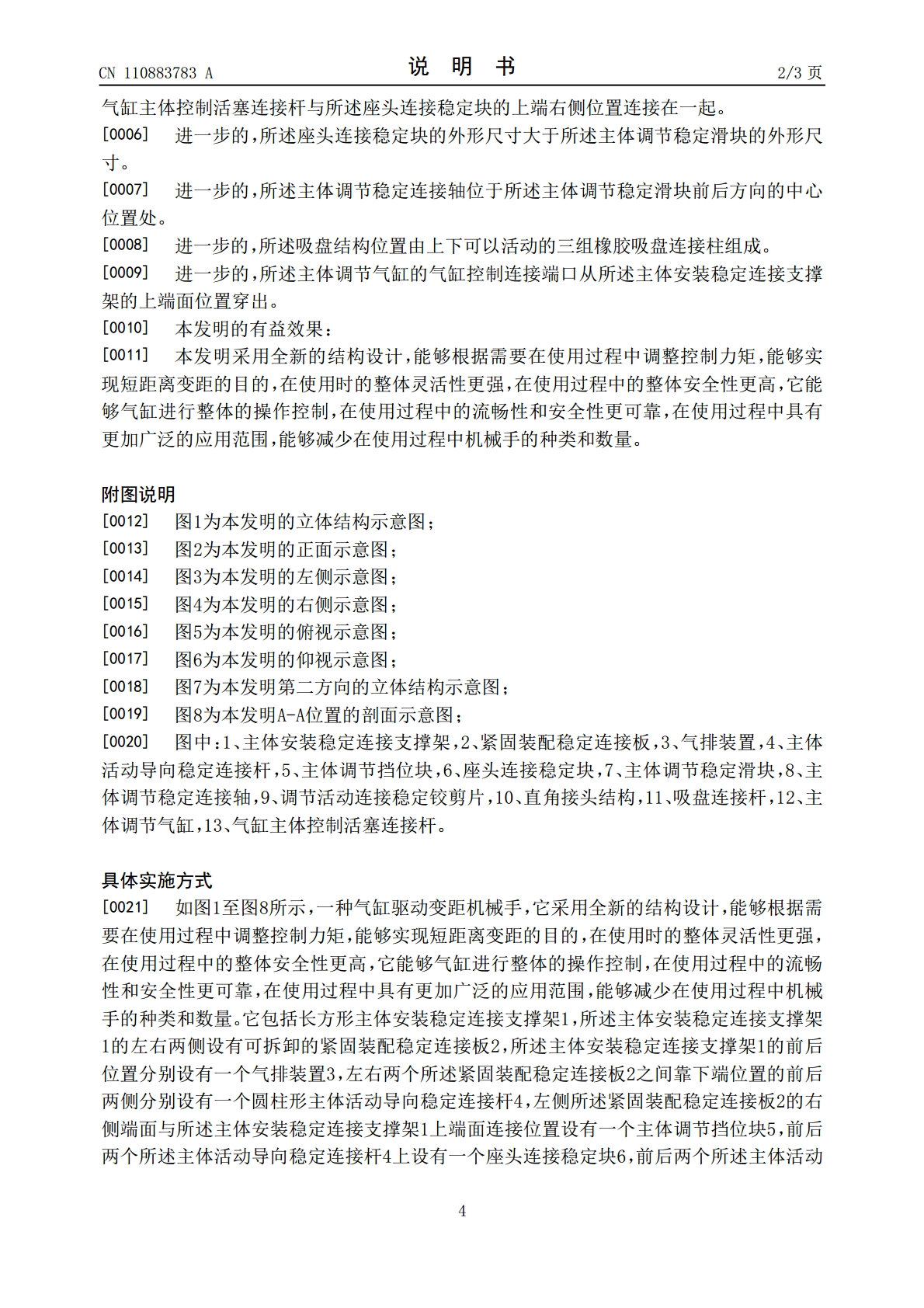
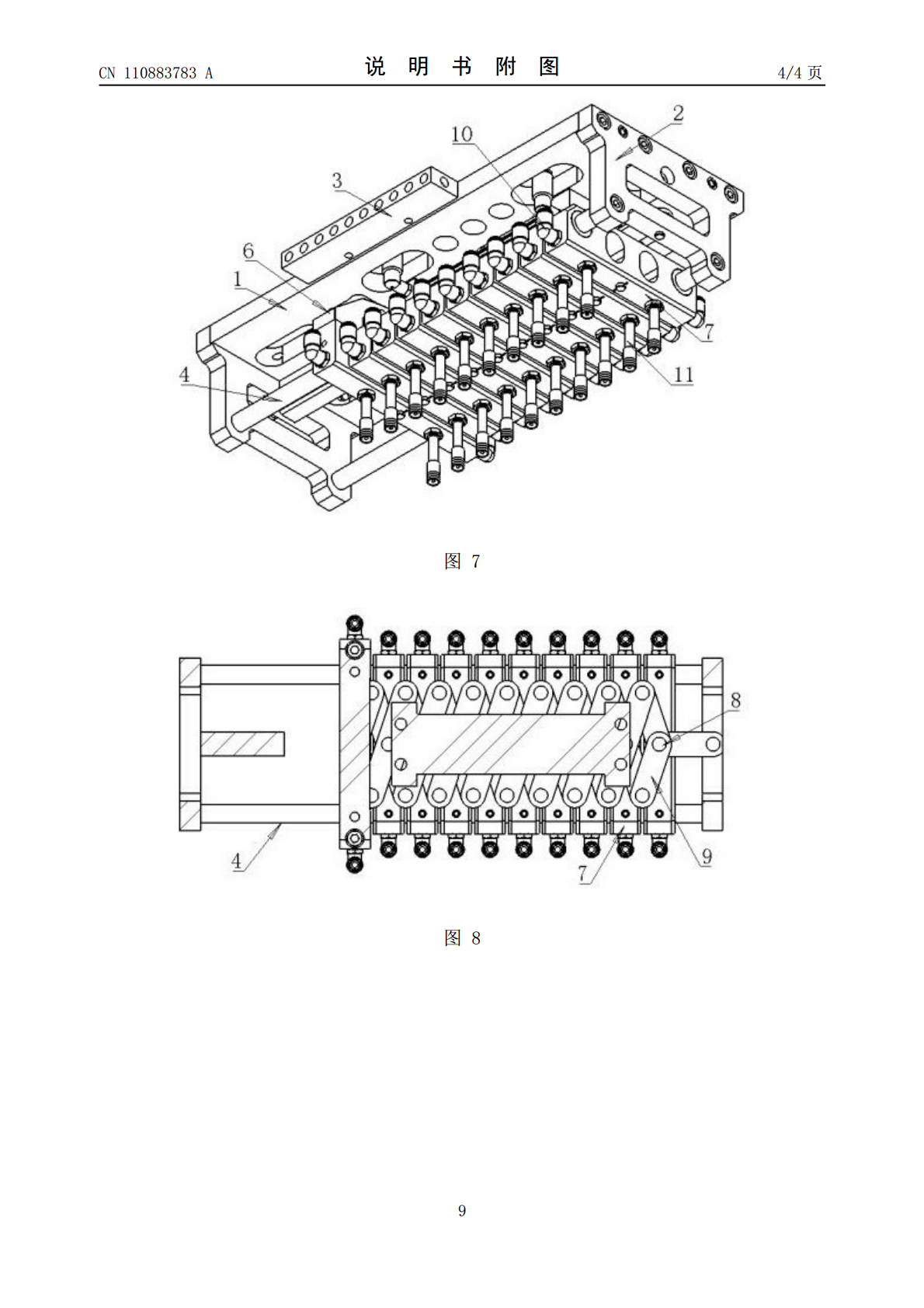
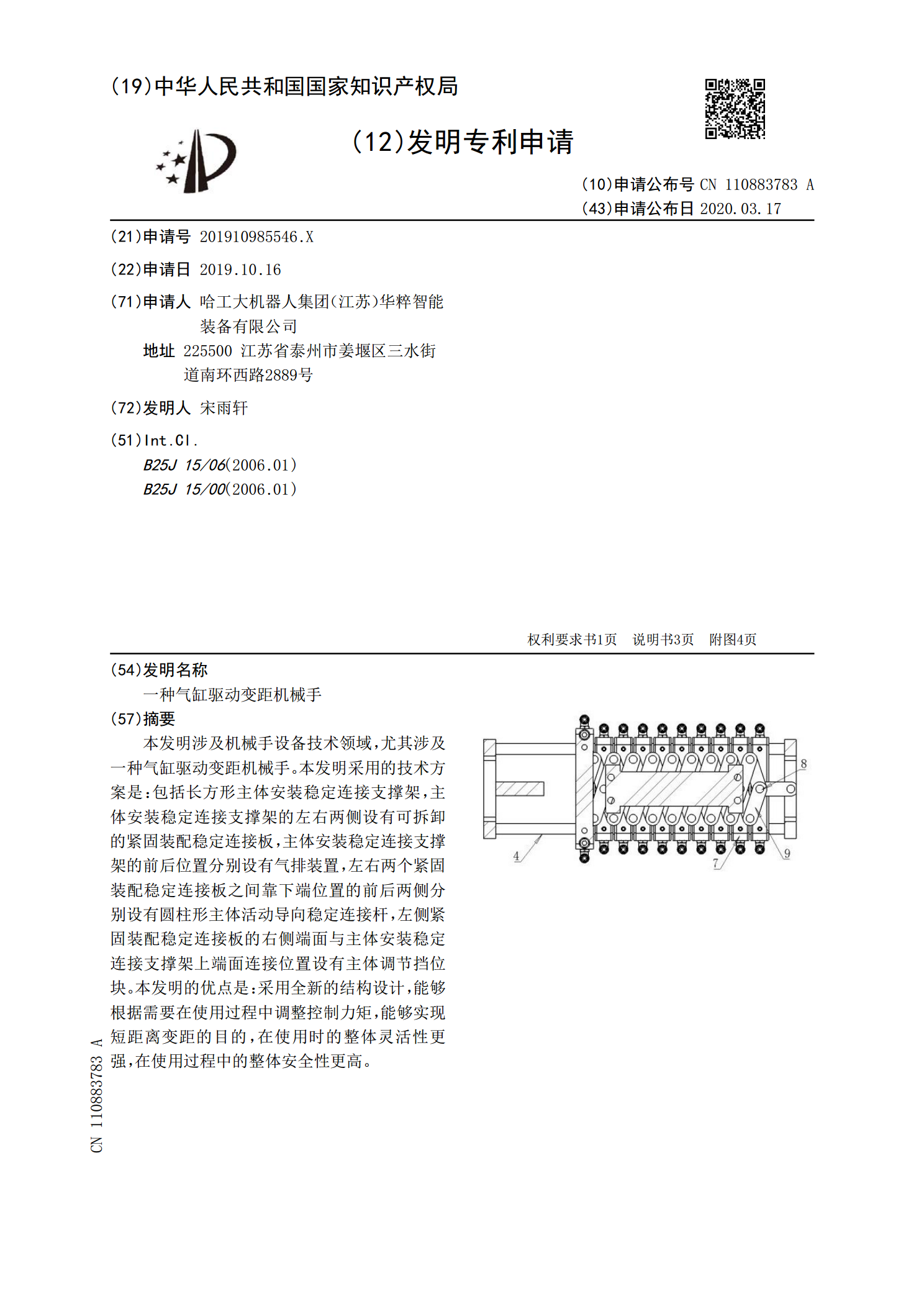
本发明涉及机械手设备技术领域,尤其涉及一种气缸驱动变距机械手。本发明采用的技术方案是:包括长方形主体安装稳定连接支撑架,主体安装稳定连接支撑架的左右两侧设有可拆卸的紧固装配稳定连接板,主体安装稳定连接支撑架的前后位置分别设有气排装置,左右两个紧固装配稳定连接板之间靠下端位置的前后两侧分别设有圆柱形主体活动导向稳定连接杆,左侧紧固装配稳定连接板的右侧端面与主体安装稳定连接支撑架上端面连接位置设有主体调节挡位块。本发明的优点是:采用全新的结构设计,能够根据需要在使用过程中调整控制力矩,能够实现短距离变距的目的
一种推杆气缸驱动的可穿戴机械手.pdf
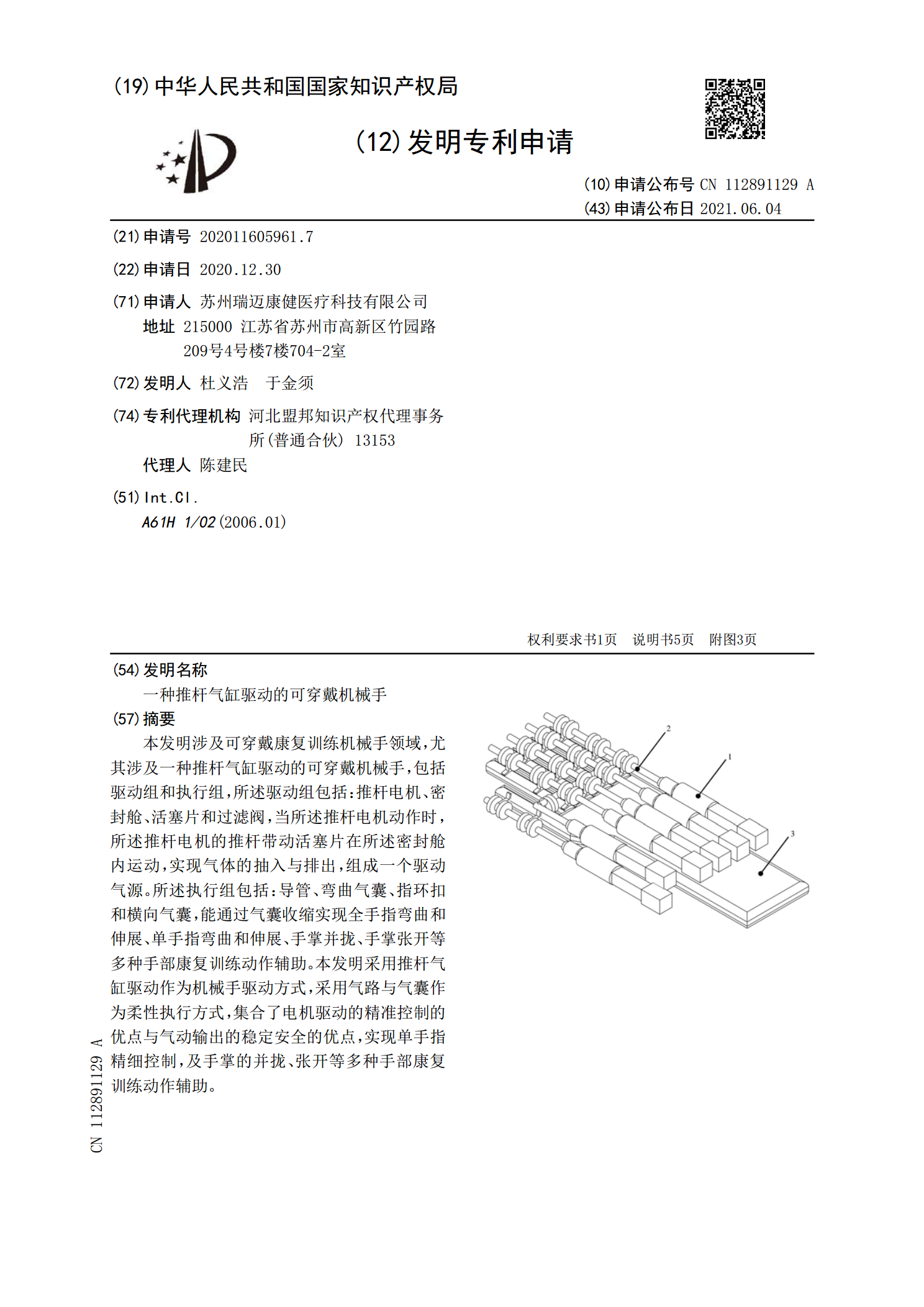
本发明涉及可穿戴康复训练机械手领域,尤其涉及一种推杆气缸驱动的可穿戴机械手,包括驱动组和执行组,所述驱动组包括:推杆电机、密封舱、活塞片和过滤阀,当所述推杆电机动作时,所述推杆电机的推杆带动活塞片在所述密封舱内运动,实现气体的抽入与排出,组成一个驱动气源。所述执行组包括:导管、弯曲气囊、指环扣和横向气囊,能通过气囊收缩实现全手指弯曲和伸展、单手指弯曲和伸展、手掌并拢、手掌张开等多种手部康复训练动作辅助。本发明采用推杆气缸驱动作为机械手驱动方式,采用气路与气囊作为柔性执行方式,集合了电机驱动的精准控制的优点
一种由旋转气缸驱动的三爪机械手.pdf
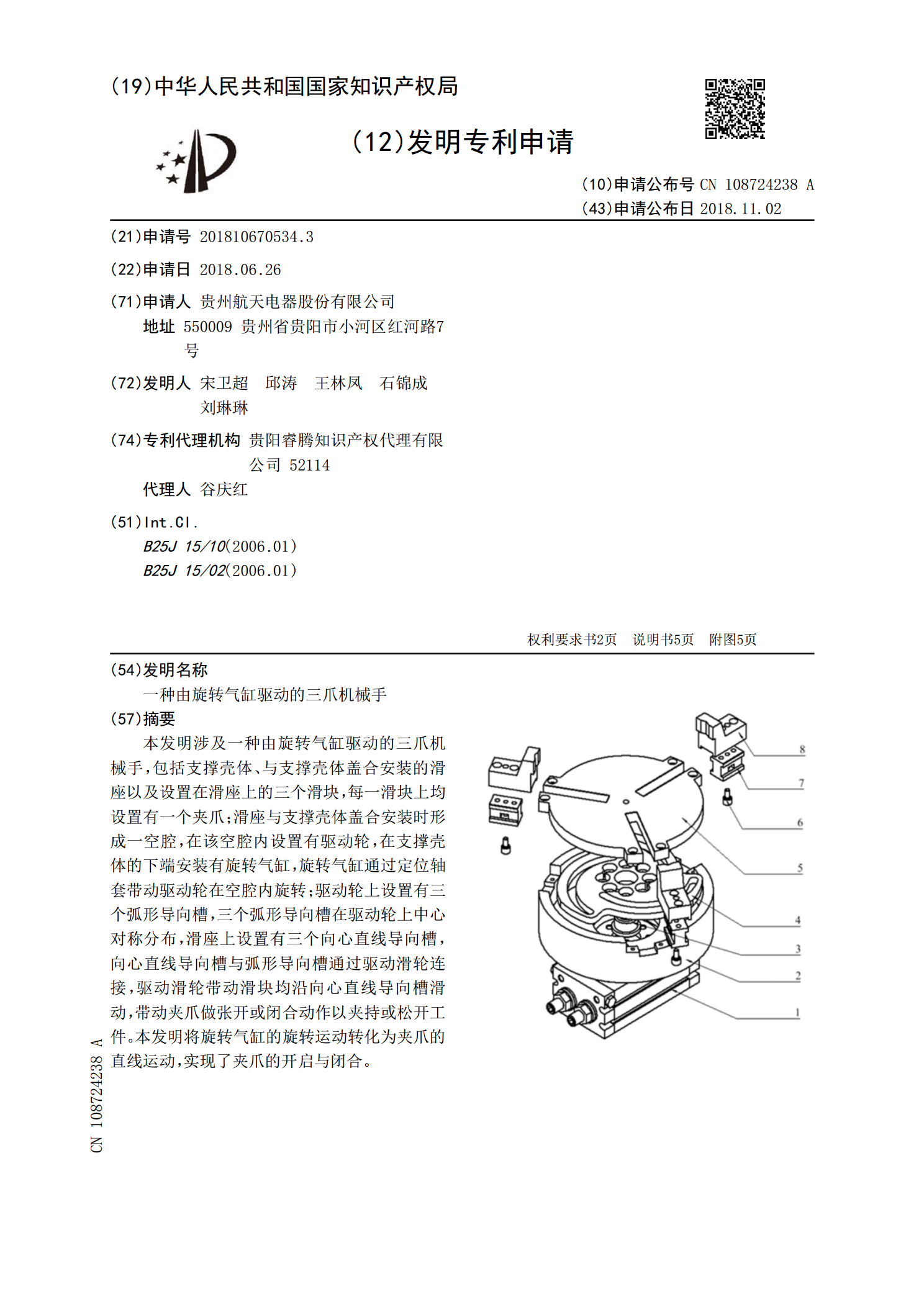
本发明涉及一种由旋转气缸驱动的三爪机械手,包括支撑壳体、与支撑壳体盖合安装的滑座以及设置在滑座上的三个滑块,每一滑块上均设置有一个夹爪;滑座与支撑壳体盖合安装时形成一空腔,在该空腔内设置有驱动轮,在支撑壳体的下端安装有旋转气缸,旋转气缸通过定位轴套带动驱动轮在空腔内旋转;驱动轮上设置有三个弧形导向槽,三个弧形导向槽在驱动轮上中心对称分布,滑座上设置有三个向心直线导向槽,向心直线导向槽与弧形导向槽通过驱动滑轮连接,驱动滑轮带动滑块均沿向心直线导向槽滑动,带动夹爪做张开或闭合动作以夹持或松开工件。本发明将旋转

一种基于气缸驱动的机器人灵巧机械手指装置.pdf
本发明涉及机器人灵巧手技术领域,并公开了一种基于气缸驱动的机器人灵巧机械手指装置的结构设计,包括基座、驱动机构、第一级驱动放大机构、传动机构、第二级驱动放大机构和仿人机械手指机构。该装置具有两级驱动放大,包括:1)利用杠杆原理实现的第一级放大;2)利用多级齿轮传动实现的第二级放大。该装置能够实现仿人手指的自由耦合运动和自适应包络运动。此外,本发明还公开了机器人灵巧机械手指装置的一种气动控制系统。本发明采用气缸驱动,控制更加容易;由于气缸、杠杆机构、滑轮均安置于基座内部,部分构件利用3D打印技术制作,因而,
一种气缸驱动装置.pdf
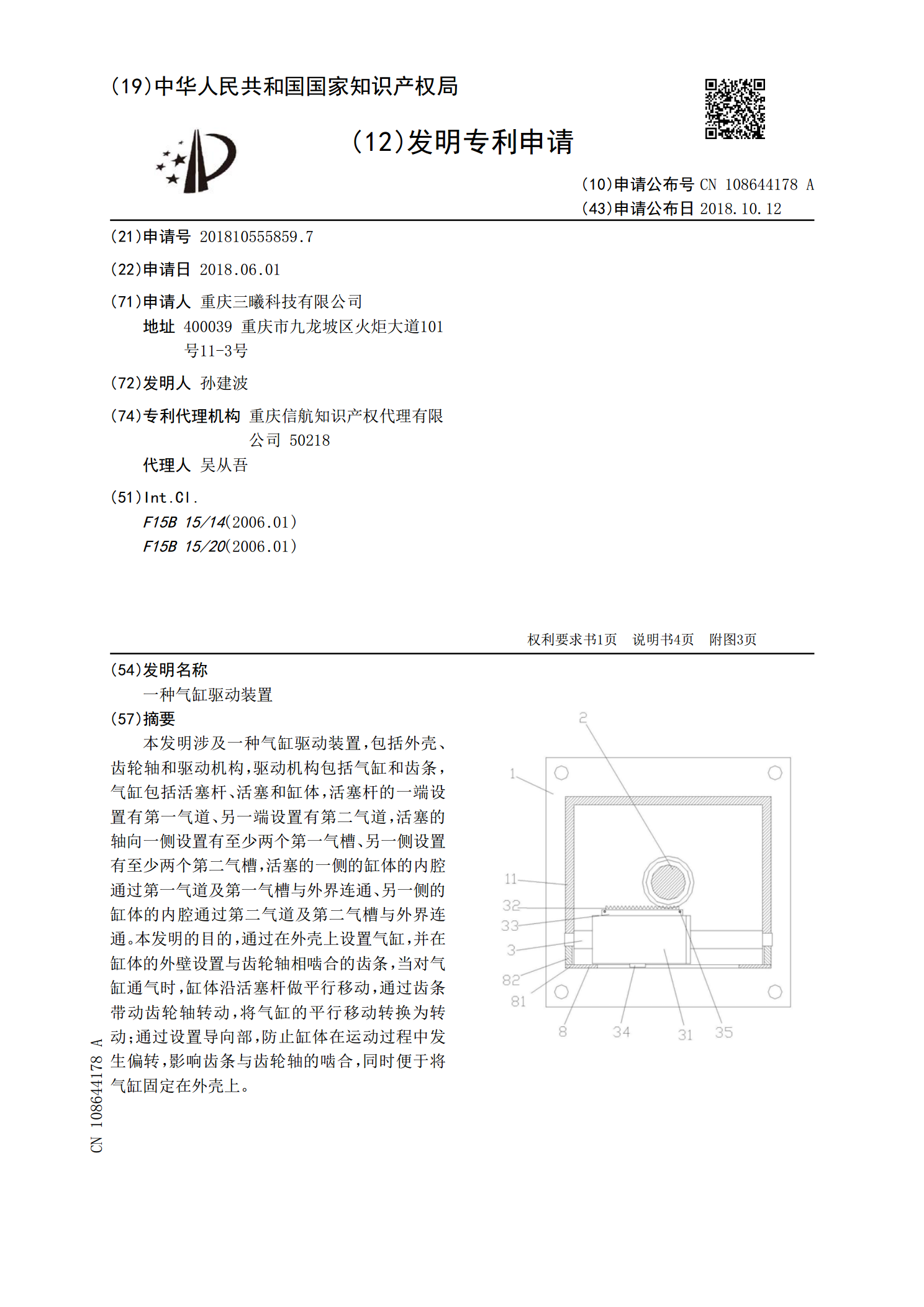
本发明涉及一种气缸驱动装置,包括外壳、齿轮轴和驱动机构,驱动机构包括气缸和齿条,气缸包括活塞杆、活塞和缸体,活塞杆的一端设置有第一气道、另一端设置有第二气道,活塞的轴向一侧设置有至少两个第一气槽、另一侧设置有至少两个第二气槽,活塞的一侧的缸体的内腔通过第一气道及第一气槽与外界连通、另一侧的缸体的内腔通过第二气道及第二气槽与外界连通。本发明的目的,通过在外壳上设置气缸,并在缸体的外壁设置与齿轮轴相啮合的齿条,当对气缸通气时,缸体沿活塞杆做平行移动,通过齿条带动齿轮轴转动,将气缸的平行移动转换为转动;通过设置