
一种微型离合器操纵装置.pdf

雨巷****可歆


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种微型离合器操纵装置.pdf
本发明涉及一种微型离合器操纵装置,该操纵机构包括机架(1)、带有花键的阶梯轴(2)、带有与凸轮结构配合间隙的离合器(3)、弹性挡圈(4)、无油衬套(5)、单列向心球轴承(6)、齿轮和离合器一体的机构(7)、螺母(8)、丝杠手柄(9)及丝杠头凸轮(10)。与现有技术相比,本发明可以最大程度的有效利用空间,该设计整个外形尺寸很小,这是通常的拨叉设计和曲柄连杆机构达不到的,在微型机构中有着很大的优势和生命力,并且适用范围广。

具有操纵装置的离合器装置.pdf
具有操纵装置的离合器装置,尤其用于机动车的驱动系,所述驱动系包括内燃机、带定子和转子的电机、以及变速器装置,其中,所述离合器装置在驱动系中可布置在一方面内燃机和另一方面电机和变速器装置之间,所述离合器装置和操纵装置集成在所述电机的转子中,所述操纵装置具有可调整的斜坡装置和回转轮传动装置,所述可调整的斜坡装置具有第一斜坡和第二斜坡,所述回转轮传动装置具有内齿轮、太阳轮、回转轮和桥接件,其中,所述第一斜坡配属于所述内齿轮,所述第二斜坡配属于所述桥接件,以便在结构和/或功能上改进所述离合器装置。

用于运行用于离合器的操纵装置的方法和用于离合器的操纵装置.pdf
本发明涉及一种用于运行用于机动车中的离合器的操纵装置的方法以及一种用于实施所述方法的、用于离合器的操纵装置,所述操纵装置带有定子装置、相对于所述定子装置可旋转的转子装置和相对于所述转子装置在轴向方向上可有限地移位的、作用在离合器上的滑动装置,其中,在转子装置和滑动装置之间设置至少部分地在油脂室中运转的滚动体螺纹传动机构,其中,在机动车运动之前,处于油脂室中的油脂被加热。

操纵装置和带有操纵装置的离合器系统.pdf
本发明涉及一种操纵装置(1),尤其用于操纵车辆驱动系中的离合器,该操纵装置具有至少一个操纵轴承(2)和至少一个对应轴承(8),所述操纵轴承与用于接合或分离所述离合器的摆动杠杆(4)作用连接,其特征为:所述摆动杠杆(4)具有设置有齿部(7)的支承区域(6),其中,所述齿部(7)啮合到所述对应轴承(8)的对应齿部(9)中。
双离合器操纵装置.pdf
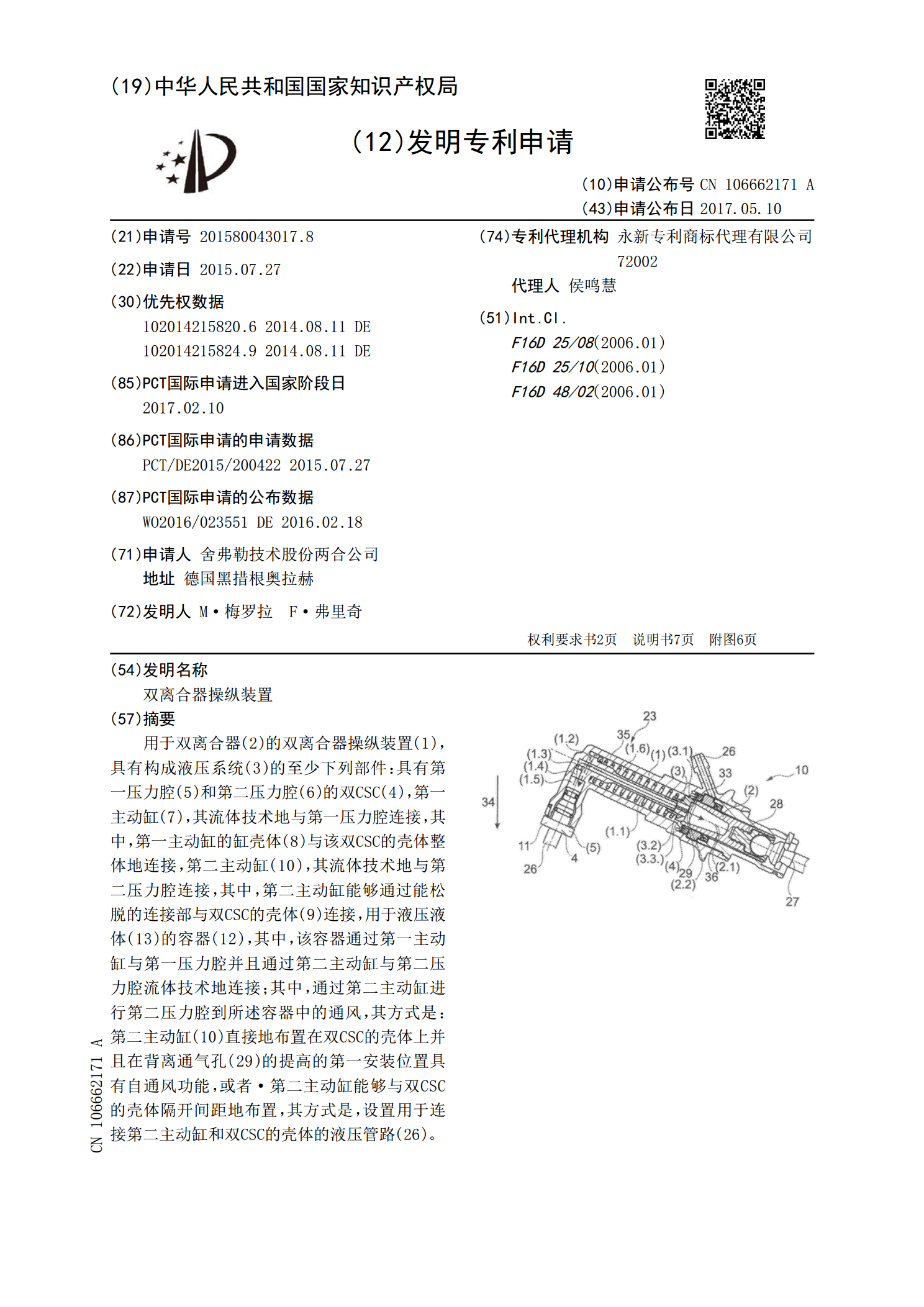
用于双离合器(2)的双离合器操纵装置(1),具有构成液压系统(3)的至少下列部件:具有第一压力腔(5)和第二压力腔(6)的双CSC(4),第一主动缸(7),其流体技术地与第一压力腔连接,其中,第一主动缸的缸壳体(8)与该双CSC的壳体整体地连接,第二主动缸(10),其流体技术地与第二压力腔连接,其中,第二主动缸能够通过能松脱的连接部与双CSC的壳体(9)连接,用于液压液体(13)的容器(12),其中,该容器通过第一主动缸与第一压力腔并且通过第二主动缸与第二压力腔流体技术地连接;其中,通过第二主动缸进行第二