
用于自动识别车辆的车轮位置的设备和方法.pdf

骊英****bb


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于自动识别车辆的车轮位置的设备和方法.pdf
本发明公开了一种用于自动识别车辆的车轮位置的设备和方法。该设备包括:旋转传感器单元,用于感测车辆车轮的旋转的变化;压力传感器单元,用于感测车辆车轮的压力的变化率;以及传感器控制单元,用于通过从所述旋转传感器单元获得的所述旋转的变化和从所述压力传感器单元获得的所述压力的变化率来判断车辆的车轮位置。所述传感器控制单元通过dw/dt×dp/dt来判断车辆的车轮位置,其中,dw/dt为旋转的变化,以及dp/dt为压力的变化率。当dw/dt×dp/dt的值具有负(-)号时,所述车轮被判断为前轮,而当dw/dt×dp

用于定位车辆的车轮的位置的方法.pdf
本发明涉及一种用于对车辆(1)的车轮(2-5)的位置进行定位的方法,所述方法包括针对每个车轮(2-5)存储源自装配到所述车轮的电子模块(6-9)的信号的强度的图像的初始阶段。根据本发明,由每个电子模块(6-9)对以预定时间间隔发射的n个信号的序列的发射被控制,对于每个n个信号的序列,所述序列的每个信号与所存储的图像中的每个图像之间的相关系数的时间变化被计算,所述n个信号中的每个的相关系数的相关峰值以及所述n个相关峰值中的每个在车轮转动期间的时间位置被计算,以及,针对每个所存储的图像,选择具有与如下时间间隔

用于确定车辆车轮上的车轮载荷的方法和设备.pdf
本发明涉及一种用于确定车辆(1)的各自配备有轮胎的车轮(W1‑W4)上的车轮载荷(LD,L0)的方法和设备。在这种背景下,在第一阶段(S1),针对相应轮胎中的每一个检测变形测量值(L)和压力测量值(p),并且针对该车辆(1)检测至少一个加速度测量值(ax,ay),以便根据第一模型计算相应车轮(W1‑W4)的车轮动态载荷(LD)并且根据第二模型计算相应车轮(W1‑W4)的车轮静态载荷(L0),其中,该第二模型包含至少一个模型参数(c1FL至c2RL)。借助于所计算的车轮动态载荷(LD)、借助于分别计算的车轮
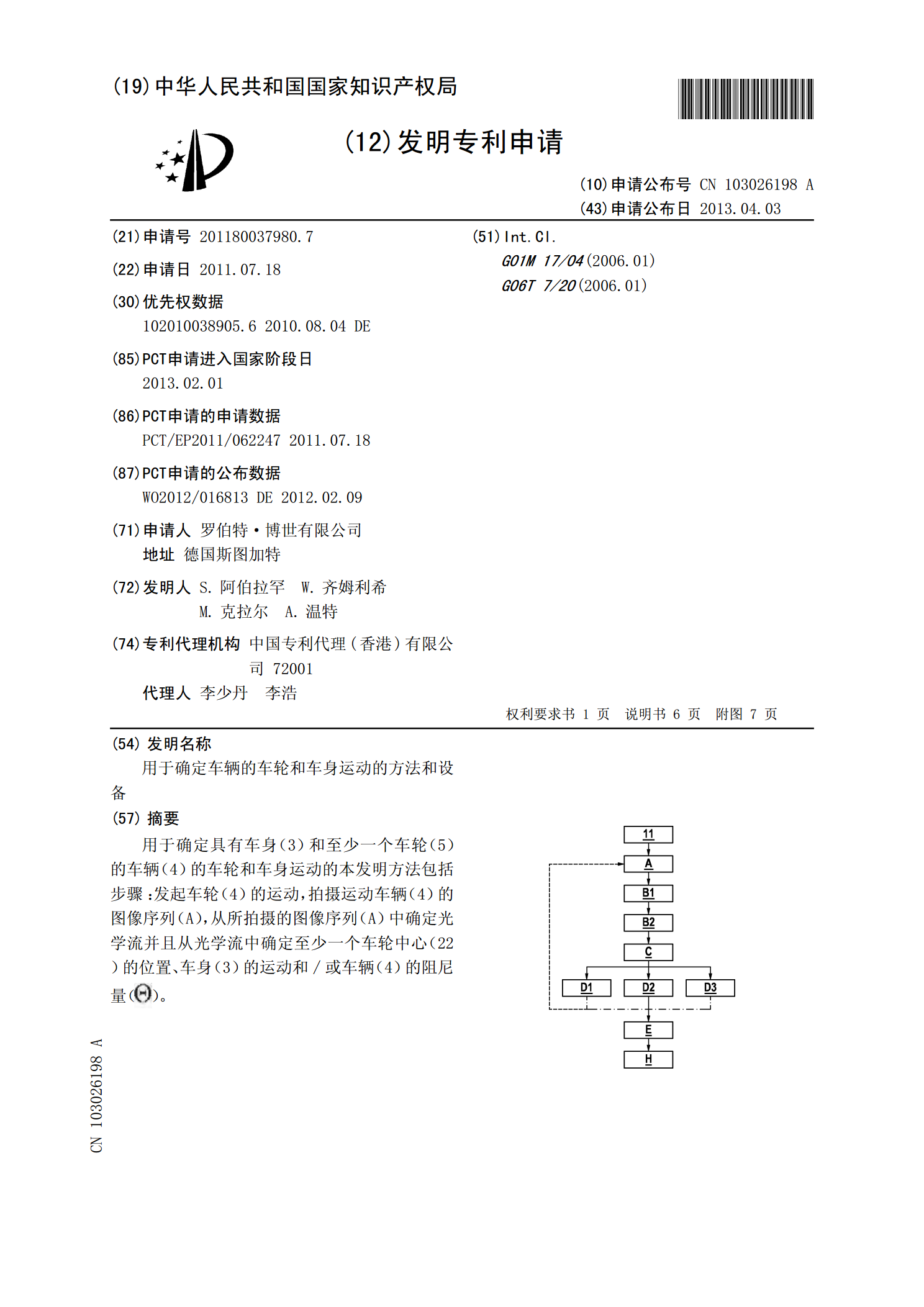
用于确定车辆的车轮和车身运动的方法和设备.pdf
用于确定具有车身(3)和至少一个车轮(5)的车辆(4)的车轮和车身运动的本发明方法包括步骤:发起车轮(4)的运动,拍摄运动车辆(4)的图像序列(A),从所拍摄的图像序列(A)中确定光学流并且从光学流中确定至少一个车轮中心(22)的位置、车身(3)的运动和/或车辆(4)的阻尼量()。
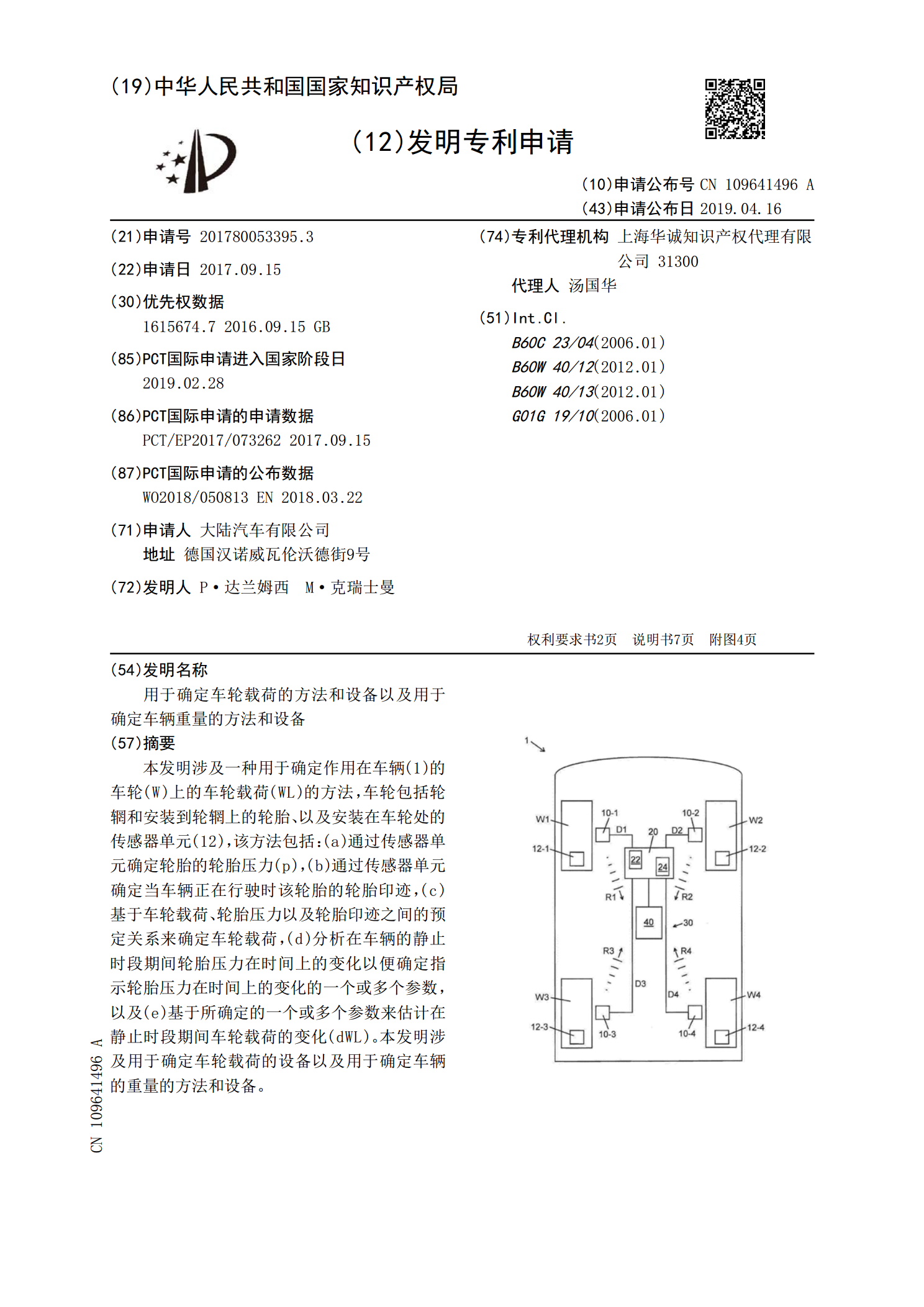
用于确定车轮载荷的方法和设备以及用于确定车辆重量的方法和设备.pdf
本发明涉及一种用于确定作用在车辆(1)的车轮(W)上的车轮载荷(WL)的方法,车轮包括轮辋和安装到轮辋上的轮胎、以及安装在车轮处的传感器单元(12),该方法包括:(a)通过传感器单元确定轮胎的轮胎压力(p),(b)通过传感器单元确定当车辆正在行驶时该轮胎的轮胎印迹,(c)基于车轮载荷、轮胎压力以及轮胎印迹之间的预定关系来确定车轮载荷,(d)分析在车辆的静止时段期间轮胎压力在时间上的变化以便确定指示轮胎压力在时间上的变化的一个或多个参数,以及(e)基于所确定的一个或多个参数来估计在静止时段期间车轮载荷的变化