
重型半挂车状态估计方法.pdf

努力****甲寅


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
重型半挂车状态估计方法.pdf
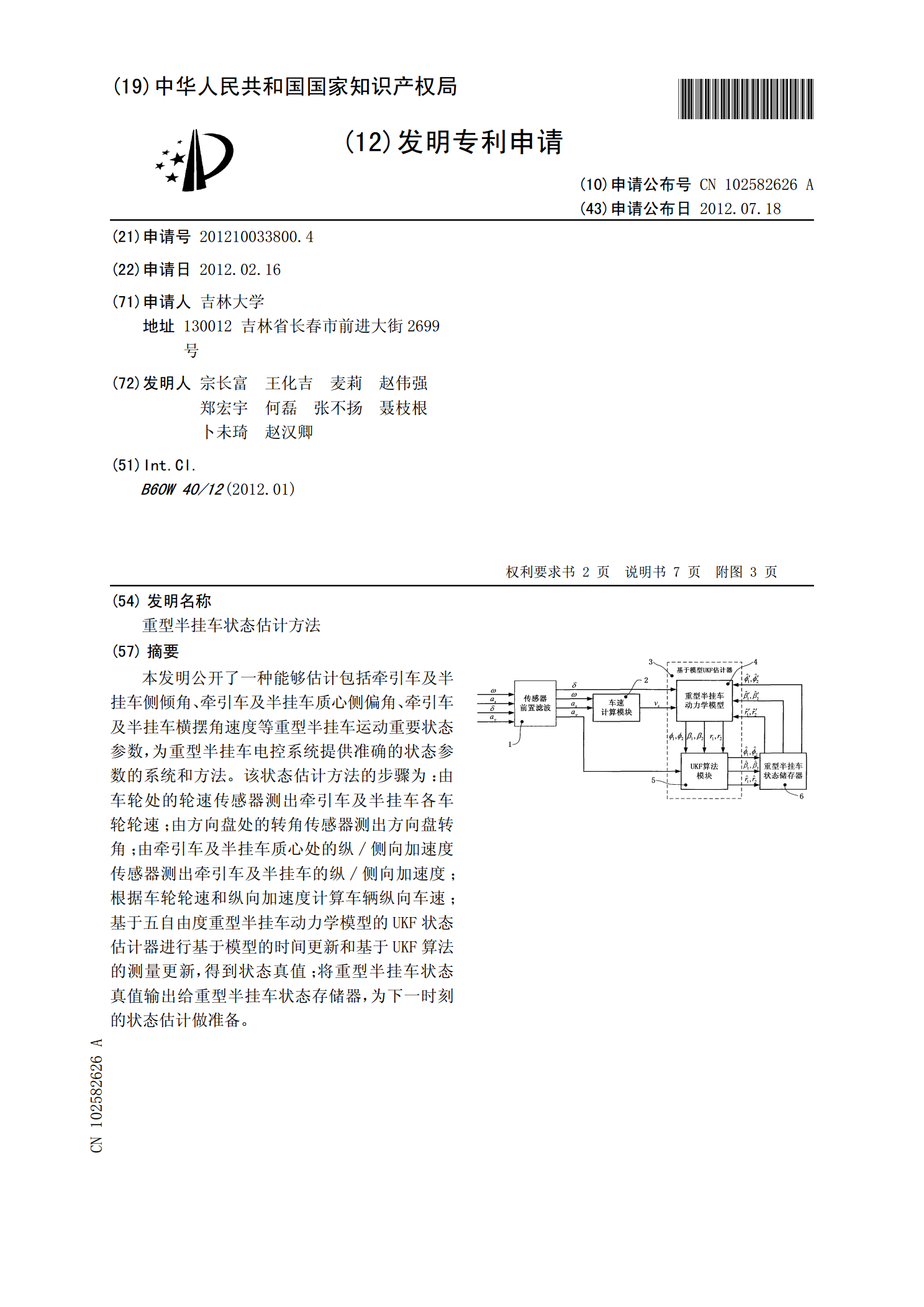
本发明公开了一种能够估计包括牵引车及半挂车侧倾角、牵引车及半挂车质心侧偏角、牵引车及半挂车横摆角速度等重型半挂车运动重要状态参数,为重型半挂车电控系统提供准确的状态参数的系统和方法。该状态估计方法的步骤为:由车轮处的轮速传感器测出牵引车及半挂车各车轮轮速;由方向盘处的转角传感器测出方向盘转角;由牵引车及半挂车质心处的纵/侧向加速度传感器测出牵引车及半挂车的纵/侧向加速度;根据车轮轮速和纵向加速度计算车辆纵向车速;基于五自由度重型半挂车动力学模型的UKF状态估计器进行基于模型的时间更新和基于UKF算法的测量
路面状态估计方法和路面状态估计设备.pdf
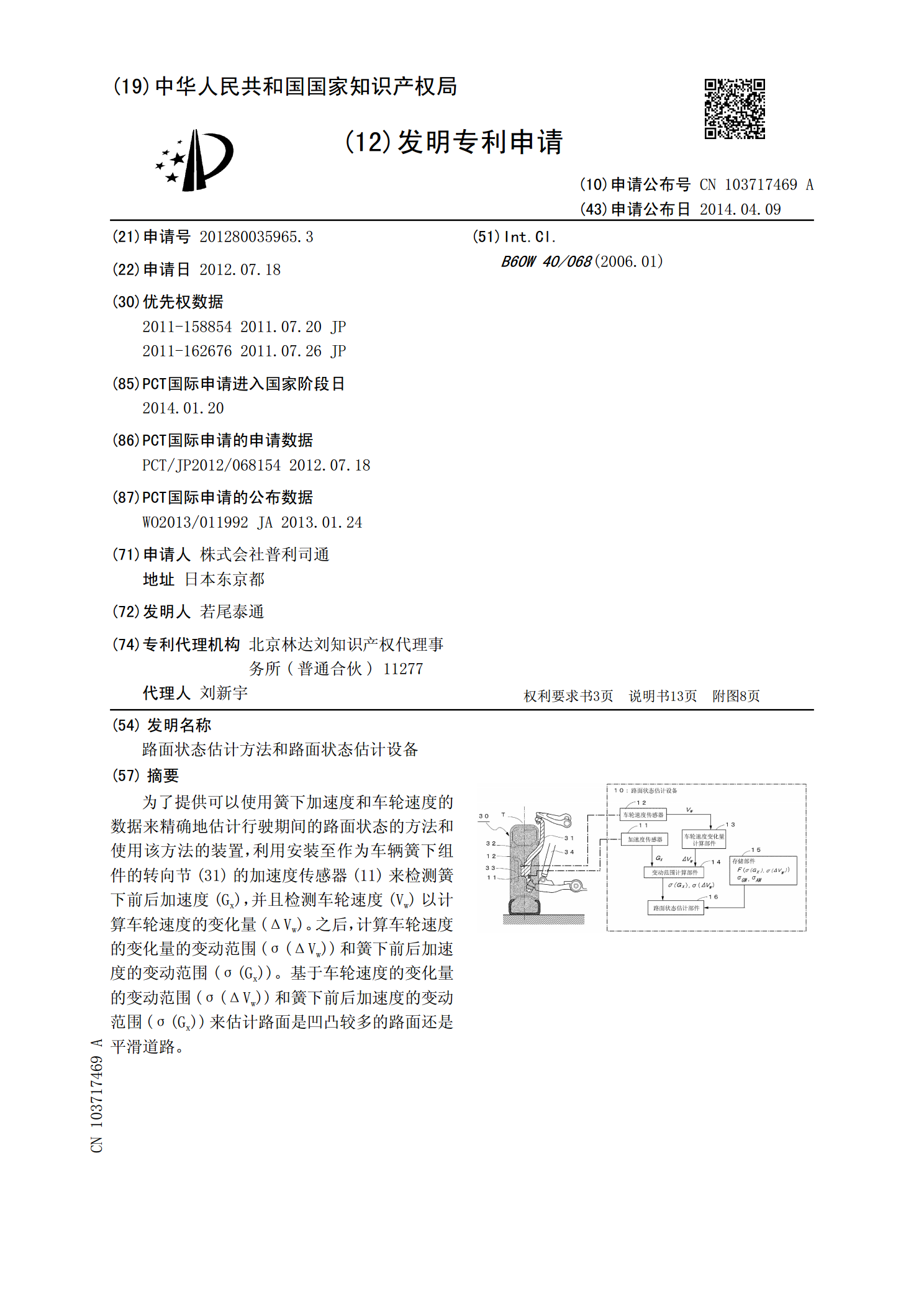
为了提供可以使用簧下加速度和车轮速度的数据来精确地估计行驶期间的路面状态的方法和使用该方法的装置,利用安装至作为车辆簧下组件的转向节(31)的加速度传感器(11)来检测簧下前后加速度(Gx),并且检测车轮速度(Vw)以计算车轮速度的变化量(ΔVw)。之后,计算车轮速度的变化量的变动范围(σ(ΔVw))和簧下前后加速度的变动范围(σ(Gx))。基于车轮速度的变化量的变动范围(σ(ΔVw))和簧下前后加速度的变动范围(σ(Gx))来估计路面是凹凸较多的路面还是平滑道路。
路面状态估计方法和路面状态估计装置.pdf
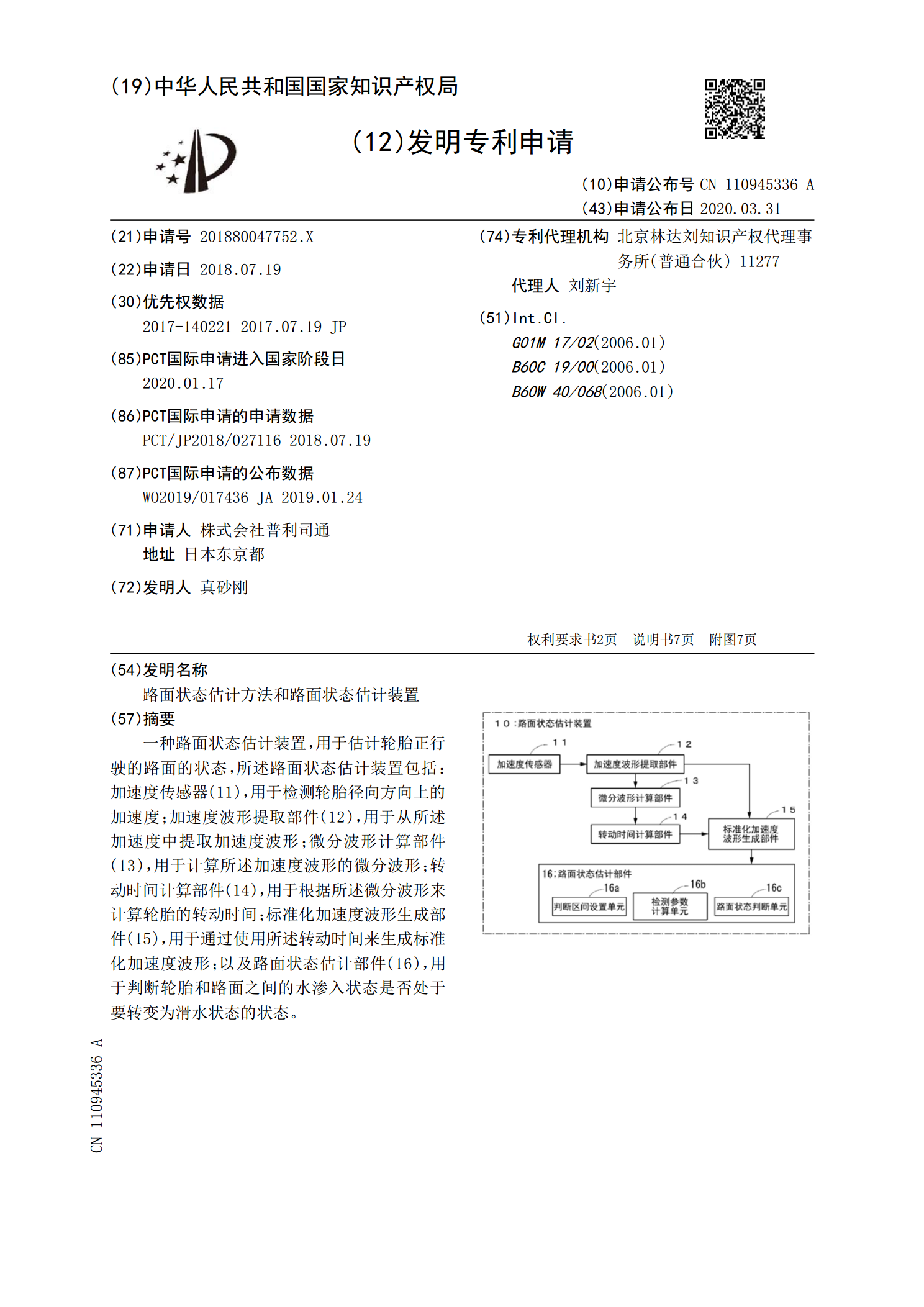
一种路面状态估计装置,用于估计轮胎正行驶的路面的状态,所述路面状态估计装置包括:加速度传感器(11),用于检测轮胎径向方向上的加速度;加速度波形提取部件(12),用于从所述加速度中提取加速度波形;微分波形计算部件(13),用于计算所述加速度波形的微分波形;转动时间计算部件(14),用于根据所述微分波形来计算轮胎的转动时间;标准化加速度波形生成部件(15),用于通过使用所述转动时间来生成标准化加速度波形;以及路面状态估计部件(16),用于判断轮胎和路面之间的水渗入状态是否处于要转变为滑水状态的状态。
路面状态估计方法和路面状态估计装置.pdf
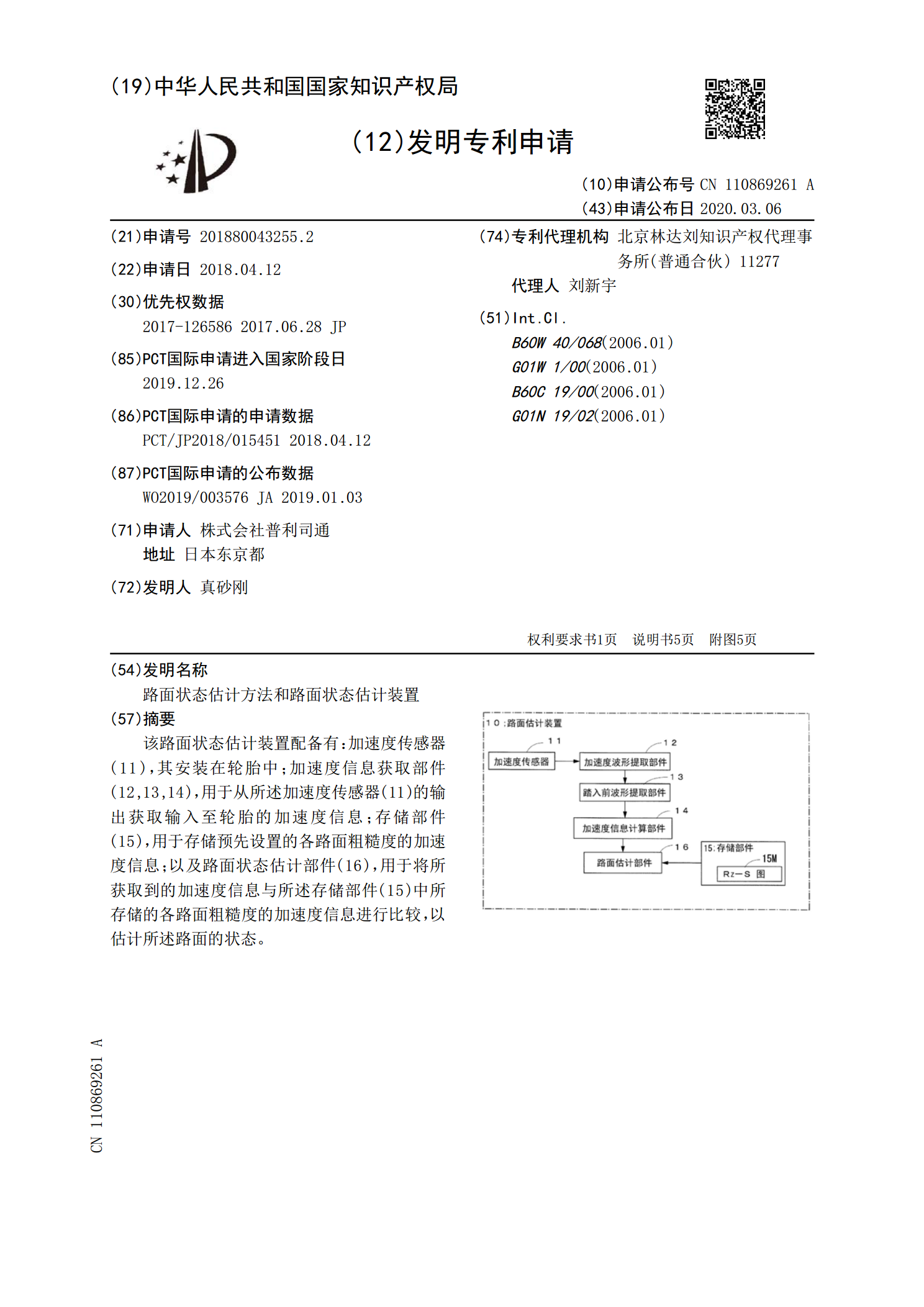
该路面状态估计装置配备有:加速度传感器(11),其安装在轮胎中;加速度信息获取部件(12,13,14),用于从所述加速度传感器(11)的输出获取输入至轮胎的加速度信息;存储部件(15),用于存储预先设置的各路面粗糙度的加速度信息;以及路面状态估计部件(16),用于将所获取到的加速度信息与所述存储部件(15)中所存储的各路面粗糙度的加速度信息进行比较,以估计所述路面的状态。

路面状态估计方法、车辆控制方法以及路面状态估计装置.pdf
本发明提供一种路面状态估计方法、车辆控制方法以及路面状态估计装置。使用以采用了变节距的普通轮胎图案为基调的路面状态检测用轮胎来高精确度地估计行驶中的路面的状态。由加速度传感器检测路面状态检测用轮胎的轮胎的振动,由旋转次数比分析单元进行旋转次数比分析,由路面状态估计单元将由旋转次数成分提取单元提取出的轮胎的振动的旋转次数成分的大小与预先设定的阈值进行比较,来估计行驶中的路面的状态,其中,该路面状态检测用轮胎具有沿着轮胎圆周方向的块的总数N为10以上的块列,设置有将块列中的沿轮胎圆周方向相邻的块彼此连结的连结