
一种助残/助老用绳驱动机械臂.pdf

东耀****哥哥


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种助残/助老用绳驱动机械臂.pdf
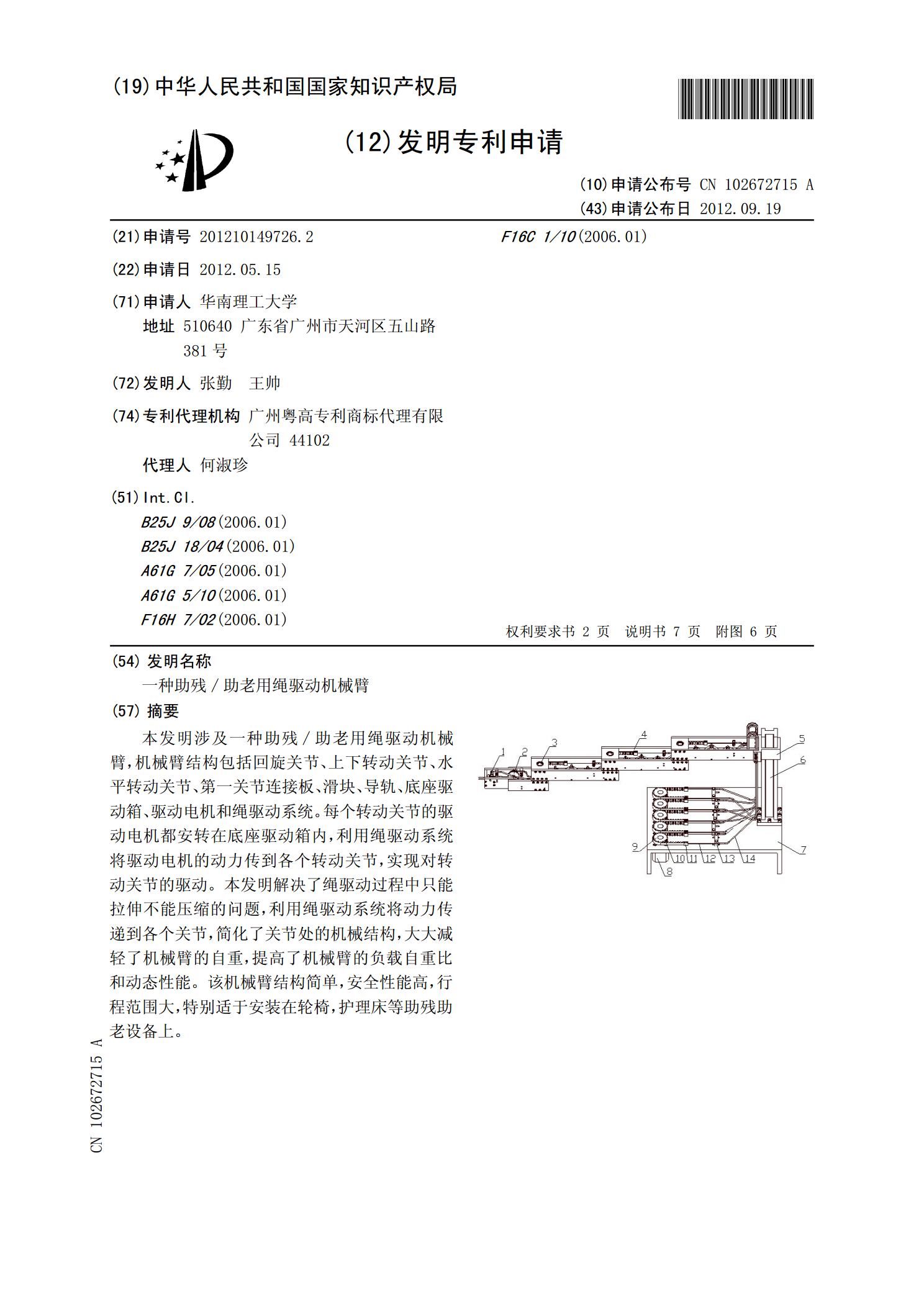
本发明涉及一种助残/助老用绳驱动机械臂,机械臂结构包括回旋关节、上下转动关节、水平转动关节、第一关节连接板、滑块、导轨、底座驱动箱、驱动电机和绳驱动系统。每个转动关节的驱动电机都安转在底座驱动箱内,利用绳驱动系统将驱动电机的动力传到各个转动关节,实现对转动关节的驱动。本发明解决了绳驱动过程中只能拉伸不能压缩的问题,利用绳驱动系统将动力传递到各个关节,简化了关节处的机械结构,大大减轻了机械臂的自重,提高了机械臂的负载自重比和动态性能。该机械臂结构简单,安全性能高,行程范围大,特别适于安装在轮椅,护理床等助残
一种多关节助老助残轮椅机械臂.pdf
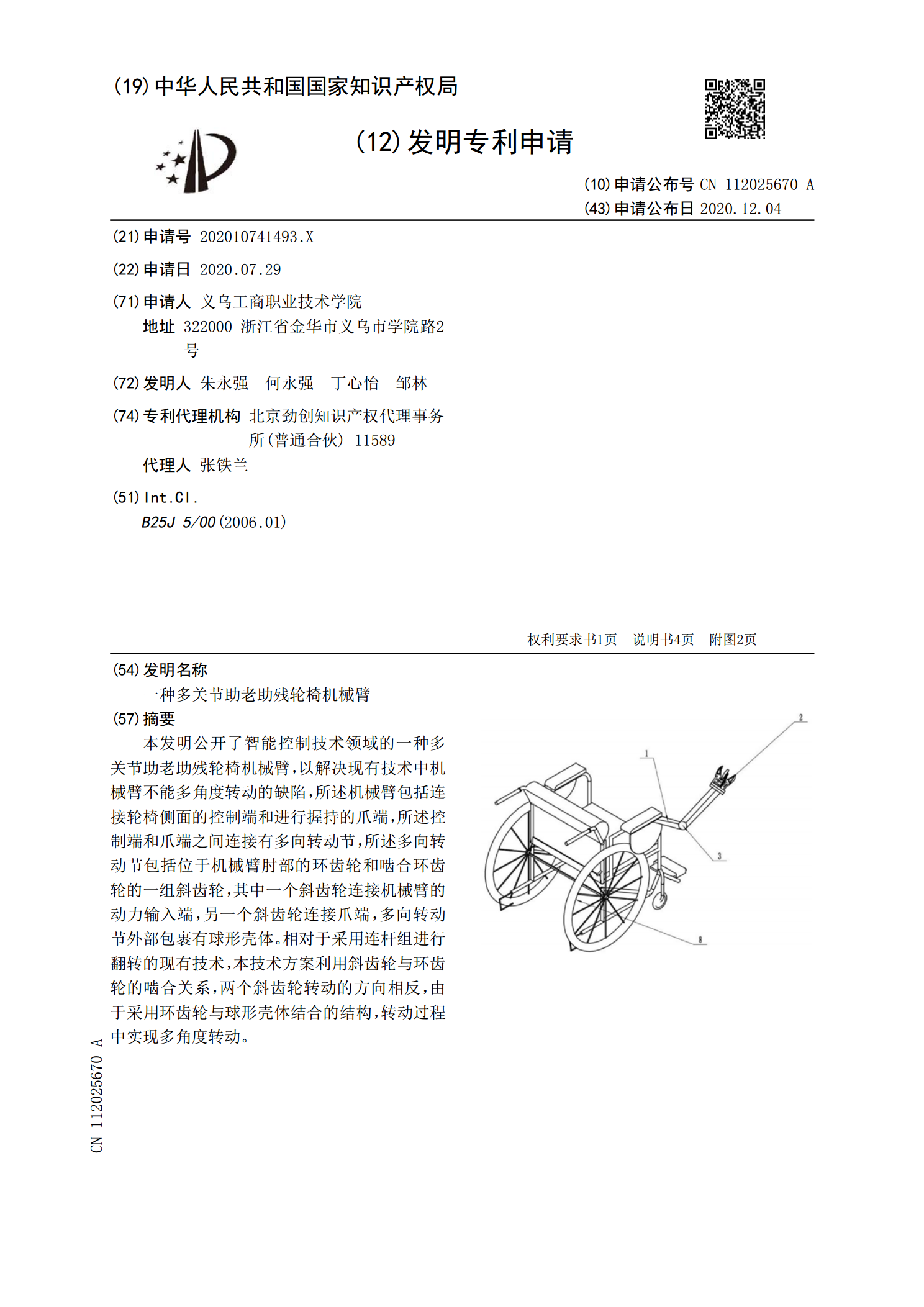
本发明公开了智能控制技术领域的一种多关节助老助残轮椅机械臂,以解决现有技术中机械臂不能多角度转动的缺陷,所述机械臂包括连接轮椅侧面的控制端和进行握持的爪端,所述控制端和爪端之间连接有多向转动节,所述多向转动节包括位于机械臂肘部的环齿轮和啮合环齿轮的一组斜齿轮,其中一个斜齿轮连接机械臂的动力输入端,另一个斜齿轮连接爪端,多向转动节外部包裹有球形壳体。相对于采用连杆组进行翻转的现有技术,本技术方案利用斜齿轮与环齿轮的啮合关系,两个斜齿轮转动的方向相反,由于采用环齿轮与球形壳体结合的结构,转动过程中实现多角度转

一种绳驱动机械臂的传动绳预紧装置.pdf
本发明涉及绳驱动机器人领域。目的是提供一种绳驱动机械臂的传动绳预紧装置,该装置应具有结构简单、调节方便、可靠性好的特点。技术方案是:一种绳驱动机械臂的传动绳预紧装置,其特征在于:该装置包括固定在基板上的预紧块安装板、可转动地定位在预紧块安装板上的第一导向轮、可滑动地定位在预紧块安装板上的预紧块、可转动地定位在预紧块上的第二导向轮、用于推动预紧块沿着预紧块安装板表面移动的调节机构;所述调节机构包括固定在预紧块安装板上的连接块、设置在预紧块上的调节孔、可转动地定位在连接块上并与调节孔螺纹啮合的调节螺栓。
一种绳驱动外骨骼机械臂的绳传动滑轮.pdf
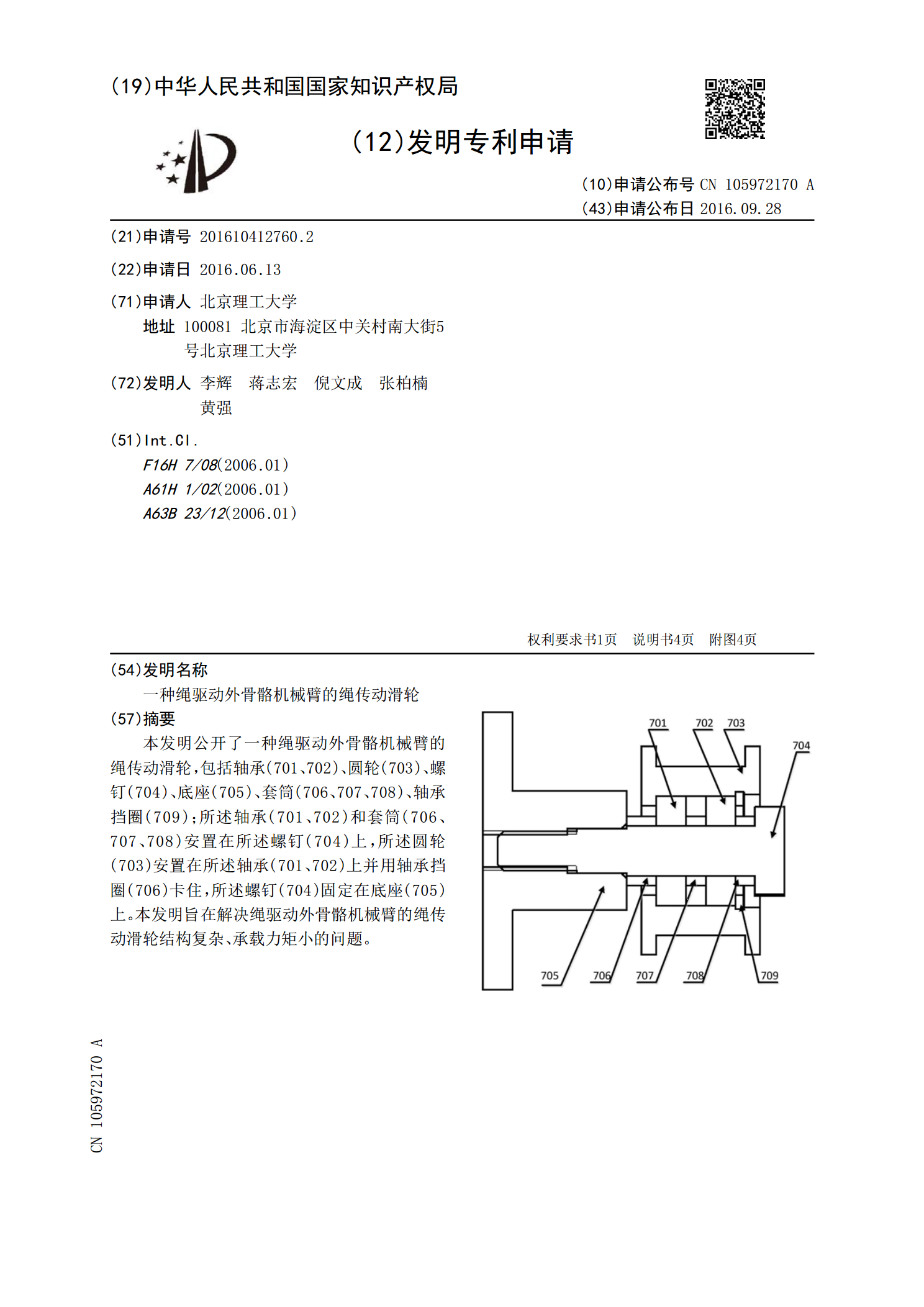
本发明公开了一种绳驱动外骨骼机械臂的绳传动滑轮,包括轴承(701、702)、圆轮(703)、螺钉(704)、底座(705)、套筒(706、707、708)、轴承挡圈(709);所述轴承(701、702)和套筒(706、707、708)安置在所述螺钉(704)上,所述圆轮(703)安置在所述轴承(701、702)上并用轴承挡圈(706)卡住,所述螺钉(704)固定在底座(705)上。本发明旨在解决绳驱动外骨骼机械臂的绳传动滑轮结构复杂、承载力矩小的问题。
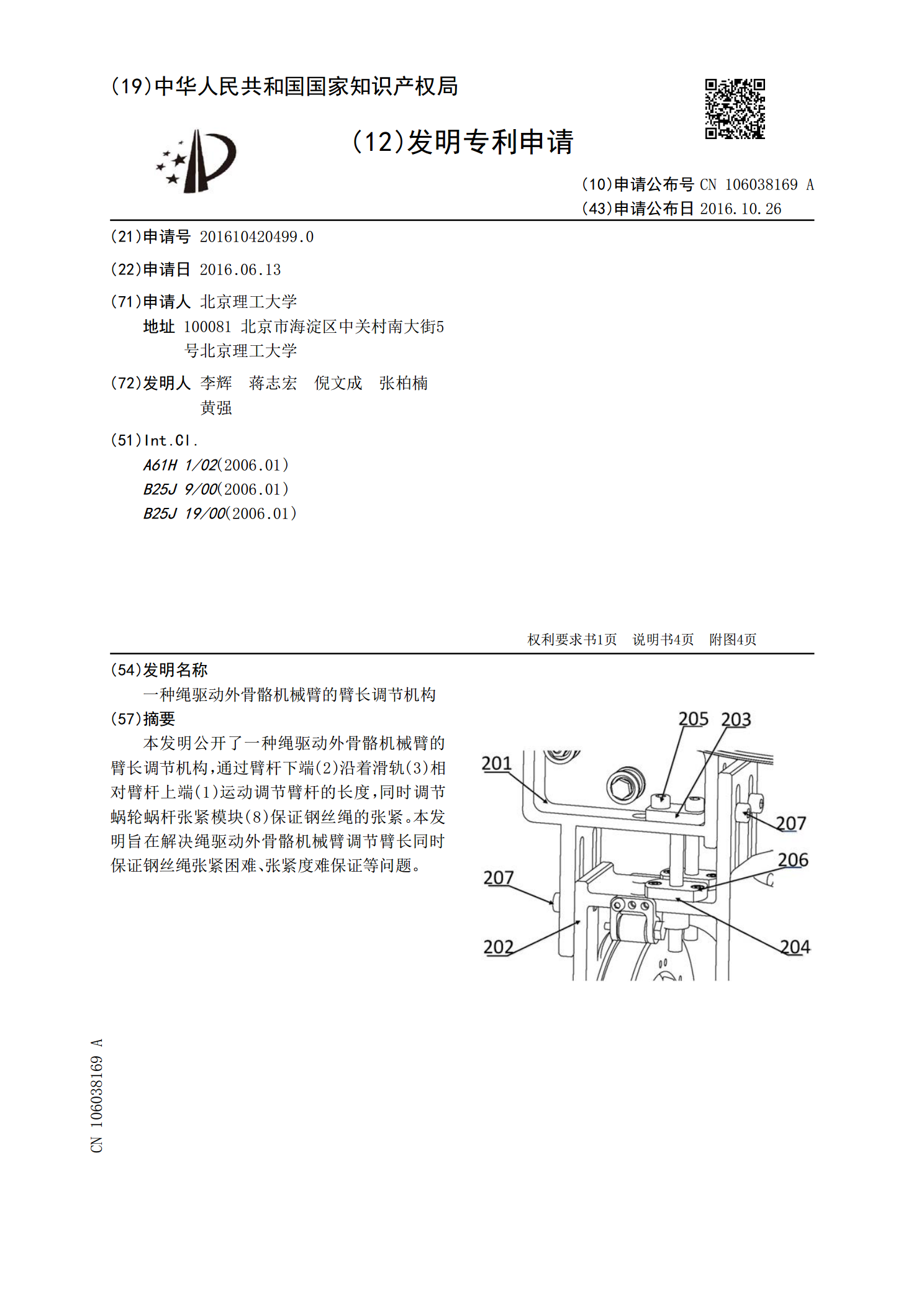
一种绳驱动外骨骼机械臂的臂长调节机构.pdf
本发明公开了一种绳驱动外骨骼机械臂的臂长调节机构,通过臂杆下端(2)沿着滑轨(3)相对臂杆上端(1)运动调节臂杆的长度,同时调节蜗轮蜗杆张紧模块(8)保证钢丝绳的张紧。本发明旨在解决绳驱动外骨骼机械臂调节臂长同时保证钢丝绳张紧困难、张紧度难保证等问题。