
一种绳驱动外骨骼机械臂的绳传动滑轮.pdf

绮兰****文章

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳驱动外骨骼机械臂的绳传动滑轮.pdf
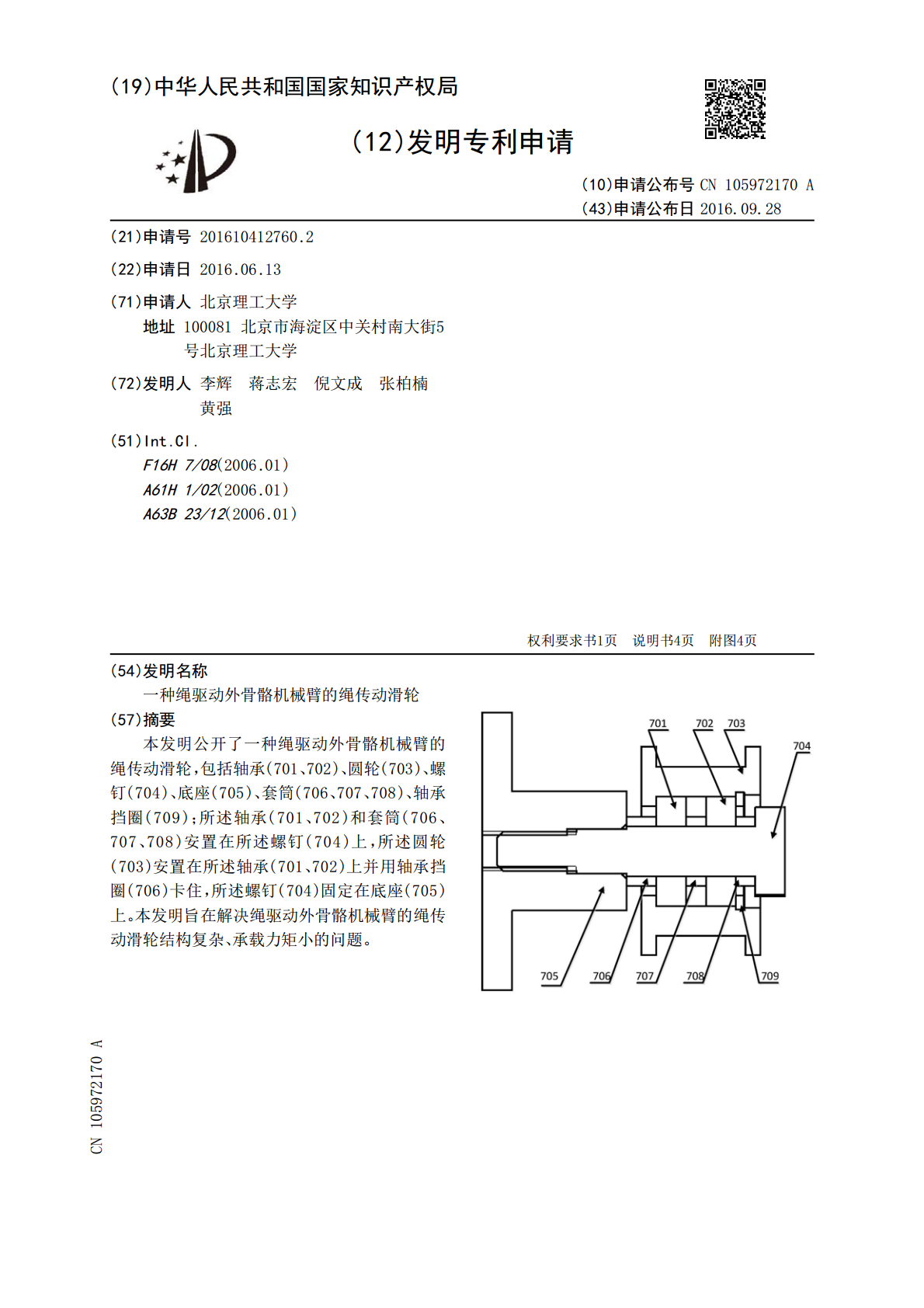
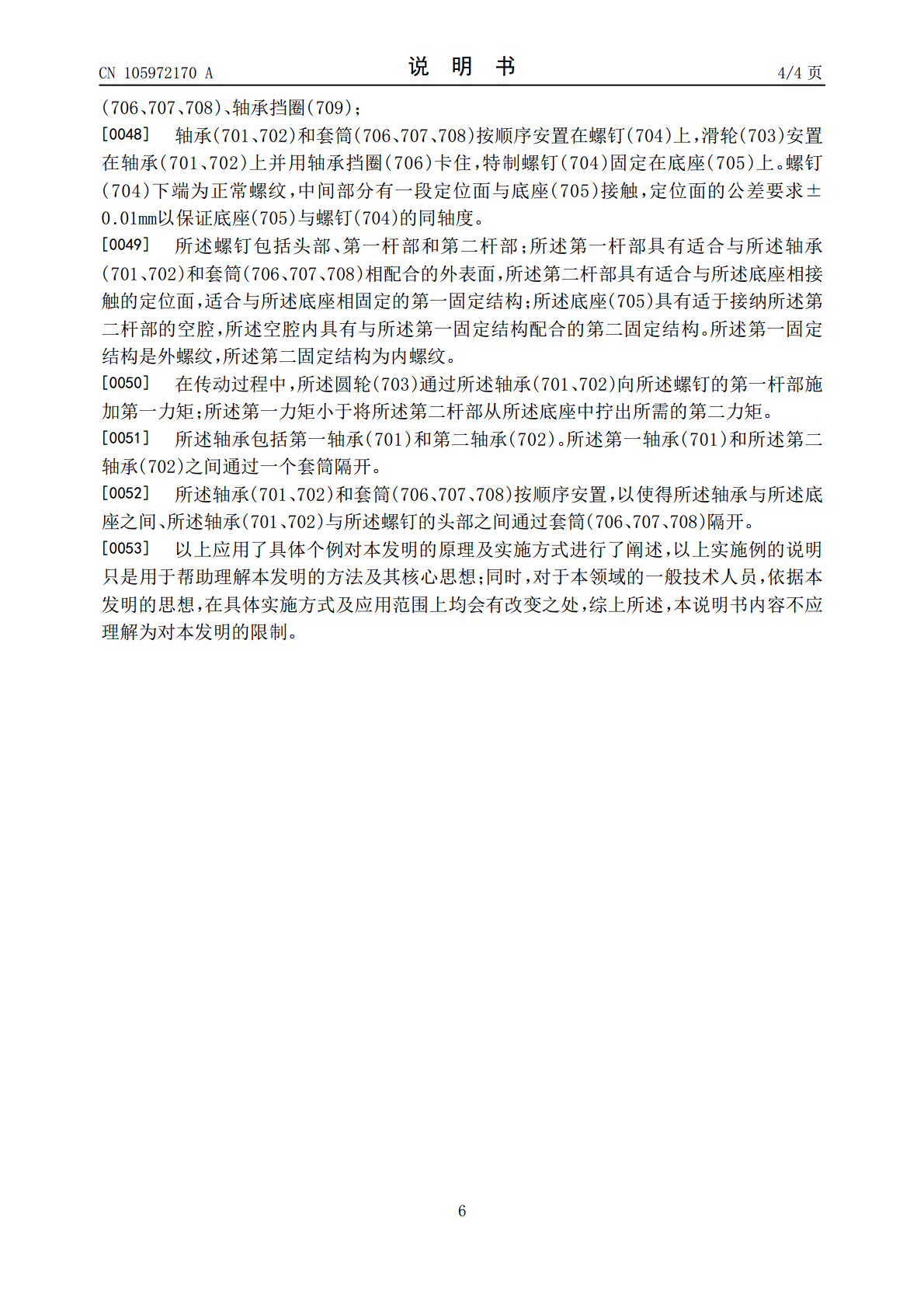
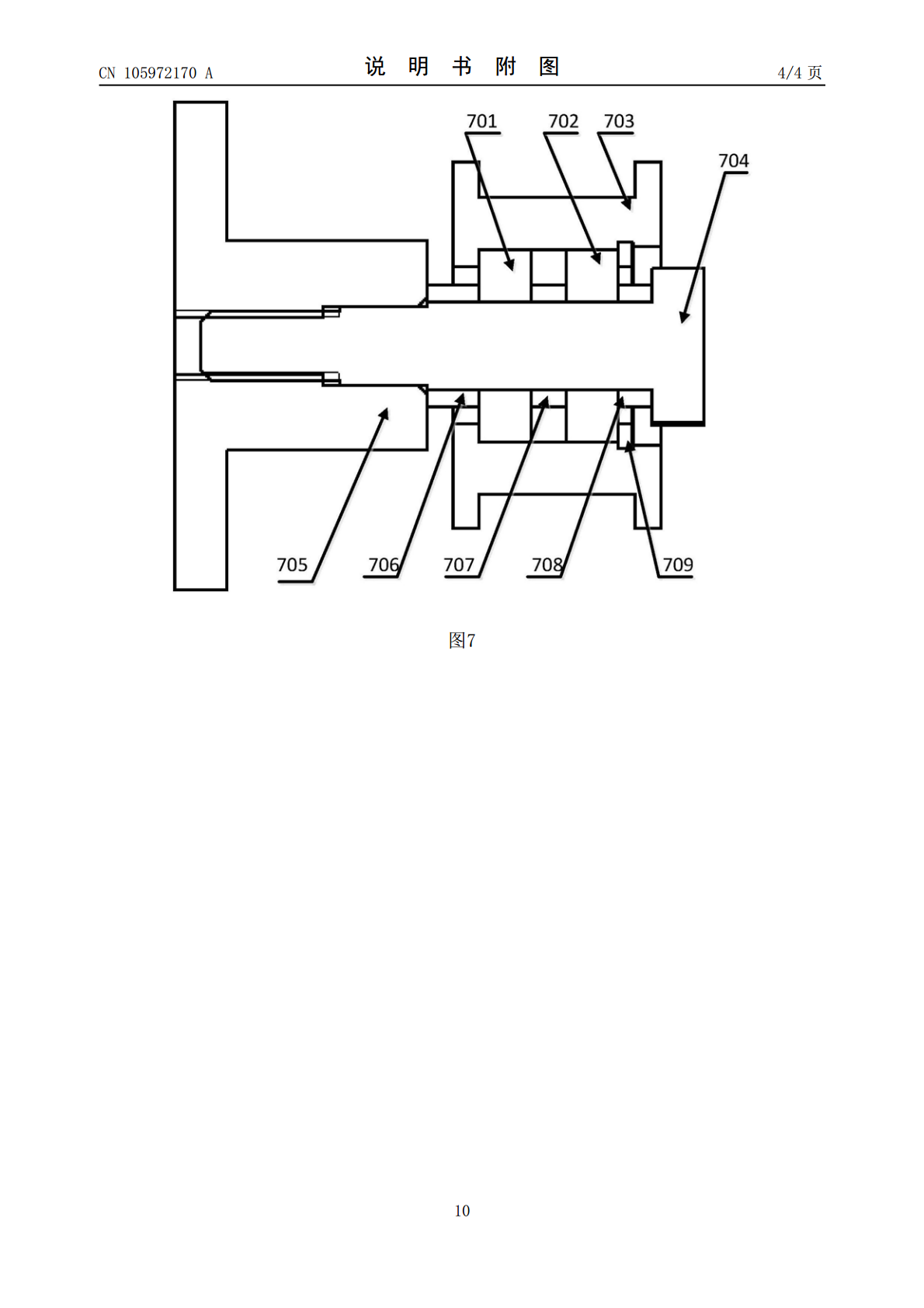
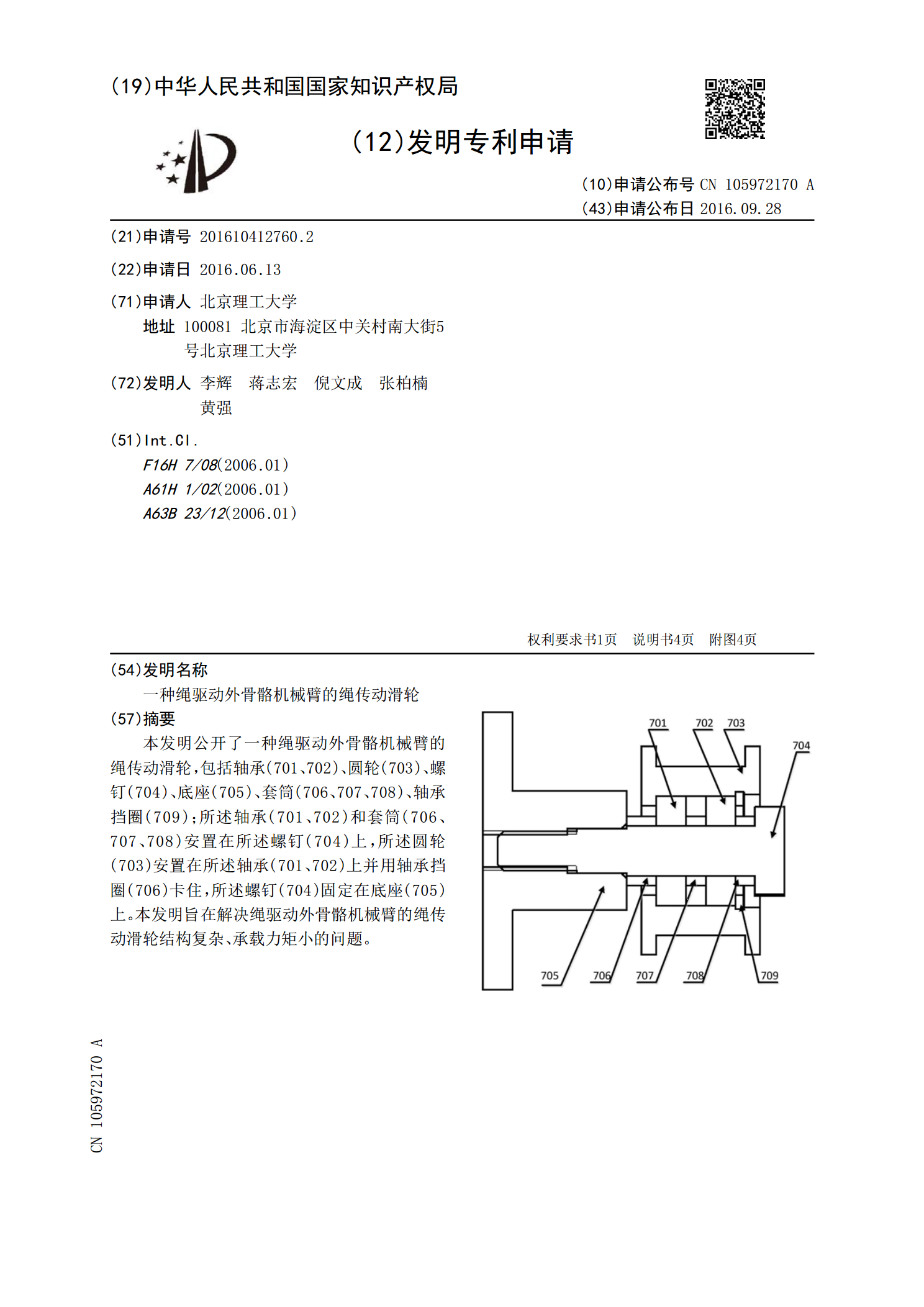
本发明公开了一种绳驱动外骨骼机械臂的绳传动滑轮,包括轴承(701、702)、圆轮(703)、螺钉(704)、底座(705)、套筒(706、707、708)、轴承挡圈(709);所述轴承(701、702)和套筒(706、707、708)安置在所述螺钉(704)上,所述圆轮(703)安置在所述轴承(701、702)上并用轴承挡圈(706)卡住,所述螺钉(704)固定在底座(705)上。本发明旨在解决绳驱动外骨骼机械臂的绳传动滑轮结构复杂、承载力矩小的问题。

一种绳驱动机械臂的传动绳预紧装置.pdf
本发明涉及绳驱动机器人领域。目的是提供一种绳驱动机械臂的传动绳预紧装置,该装置应具有结构简单、调节方便、可靠性好的特点。技术方案是:一种绳驱动机械臂的传动绳预紧装置,其特征在于:该装置包括固定在基板上的预紧块安装板、可转动地定位在预紧块安装板上的第一导向轮、可滑动地定位在预紧块安装板上的预紧块、可转动地定位在预紧块上的第二导向轮、用于推动预紧块沿着预紧块安装板表面移动的调节机构;所述调节机构包括固定在预紧块安装板上的连接块、设置在预紧块上的调节孔、可转动地定位在连接块上并与调节孔螺纹啮合的调节螺栓。
一种绳驱动外骨骼机械臂的臂长调节机构.pdf
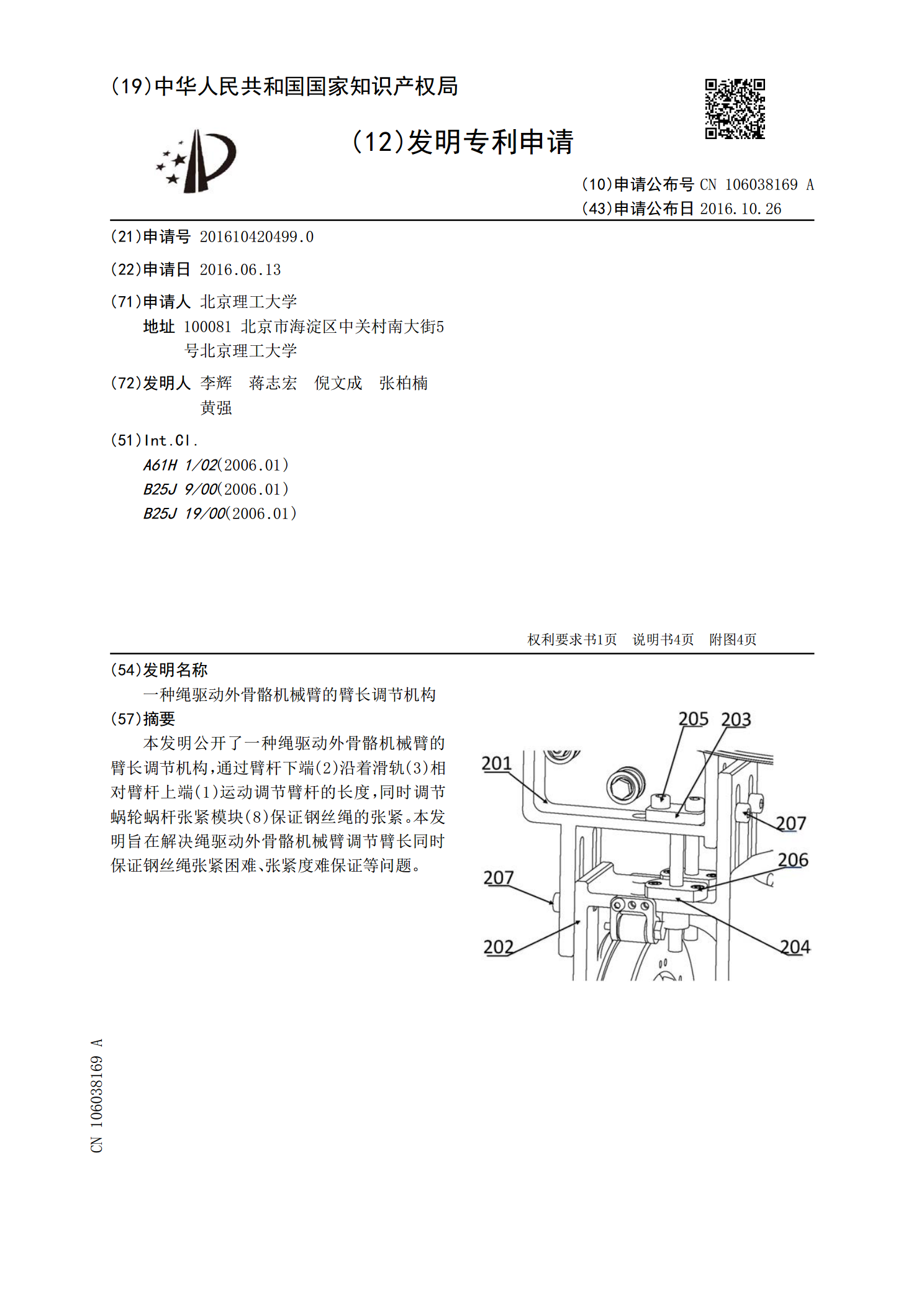
本发明公开了一种绳驱动外骨骼机械臂的臂长调节机构,通过臂杆下端(2)沿着滑轨(3)相对臂杆上端(1)运动调节臂杆的长度,同时调节蜗轮蜗杆张紧模块(8)保证钢丝绳的张紧。本发明旨在解决绳驱动外骨骼机械臂调节臂长同时保证钢丝绳张紧困难、张紧度难保证等问题。

基于柔绳传动的外骨骼柔性关节驱动装置.pdf
本发明公开了一种基于柔绳传动的外骨骼柔性关节驱动装置,它包括机架、电机、关节、绕线装置和柔绳,关节的箱体和绕线装置分别与机架固定连接,电机通过联轴器与绕线装置连接;柔绳缠绕在绕线装置上,并且在由绕线装置引出后,柔绳的两端分别与关节的固定轮固定连接。本发明在精确实现传动的同时,较大程度地减轻了外骨骼康复治疗装置的重量,减轻患者的负担。

绳传动象鼻仿生机械臂.pdf
本发明公开绳传动象鼻仿生机械臂,包含底座、基台、波纹管、扩展台、小齿轮、转臂电机、转轴电机、两个联轴器、五个转台、驱动轴、传动绳、三个锥齿轮、两个转台轴承,底座与基台之间安装有一个转台轴承,相邻的两个转台构成转动副,扩展台与中央锥齿轮之间安装有一个转台轴承,左锥齿轮和右锥齿轮均与中央锥齿轮构成轮齿啮合关系,驱动轴为能传递扭矩的柔性材质,其下端与转轴电机的输出轴连接,其上端与中央锥齿轮连接,扩展台上端面设有六个螺纹孔,可安装不同的执行机构,传动绳一端固定于左锥绳轮,另一端固定于右锥绳轮,并依次缠绕于各转台下