
一种多关节助老助残轮椅机械臂.pdf

努力****承悦


1/8
2/8
3/8
4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多关节助老助残轮椅机械臂.pdf
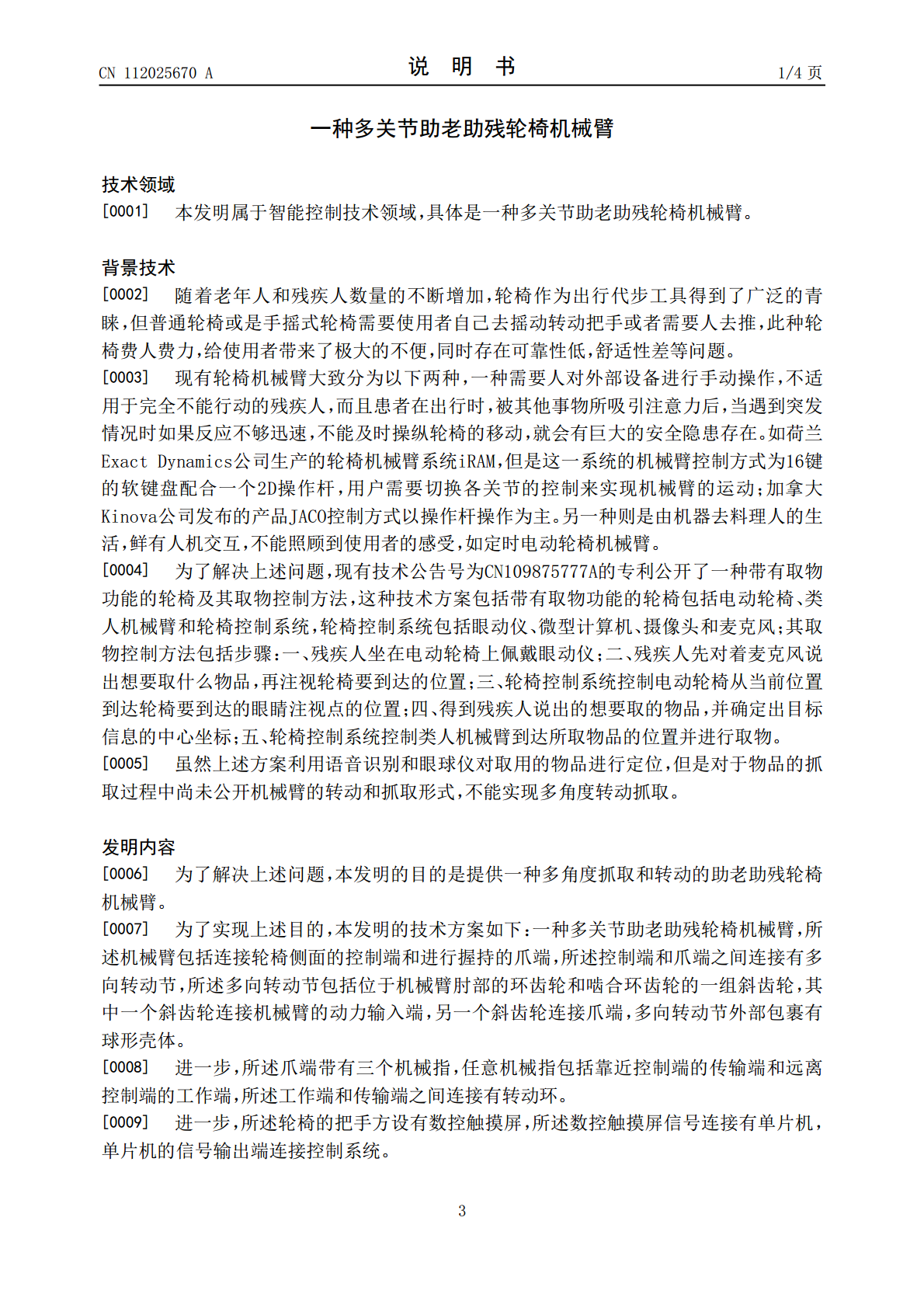
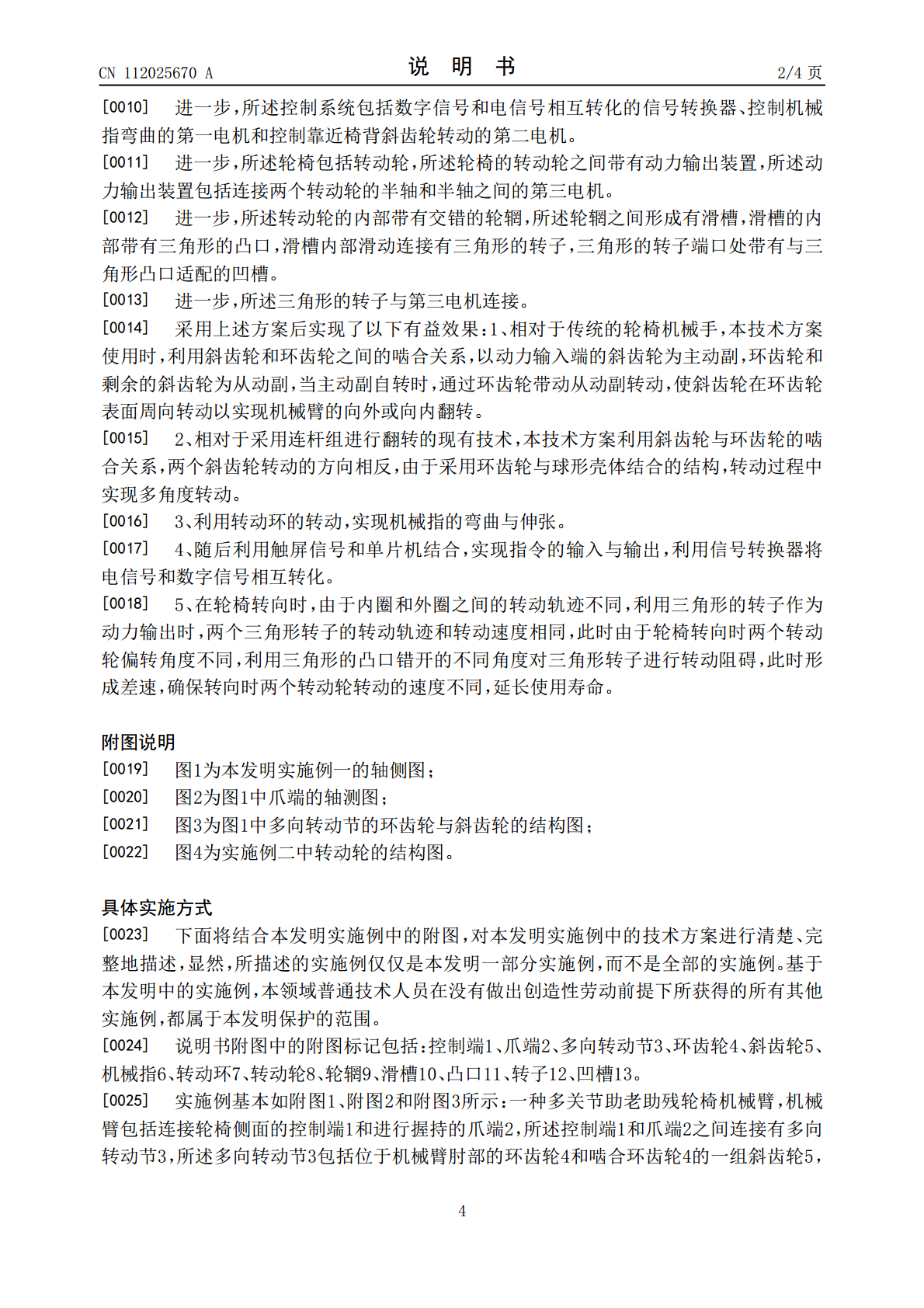
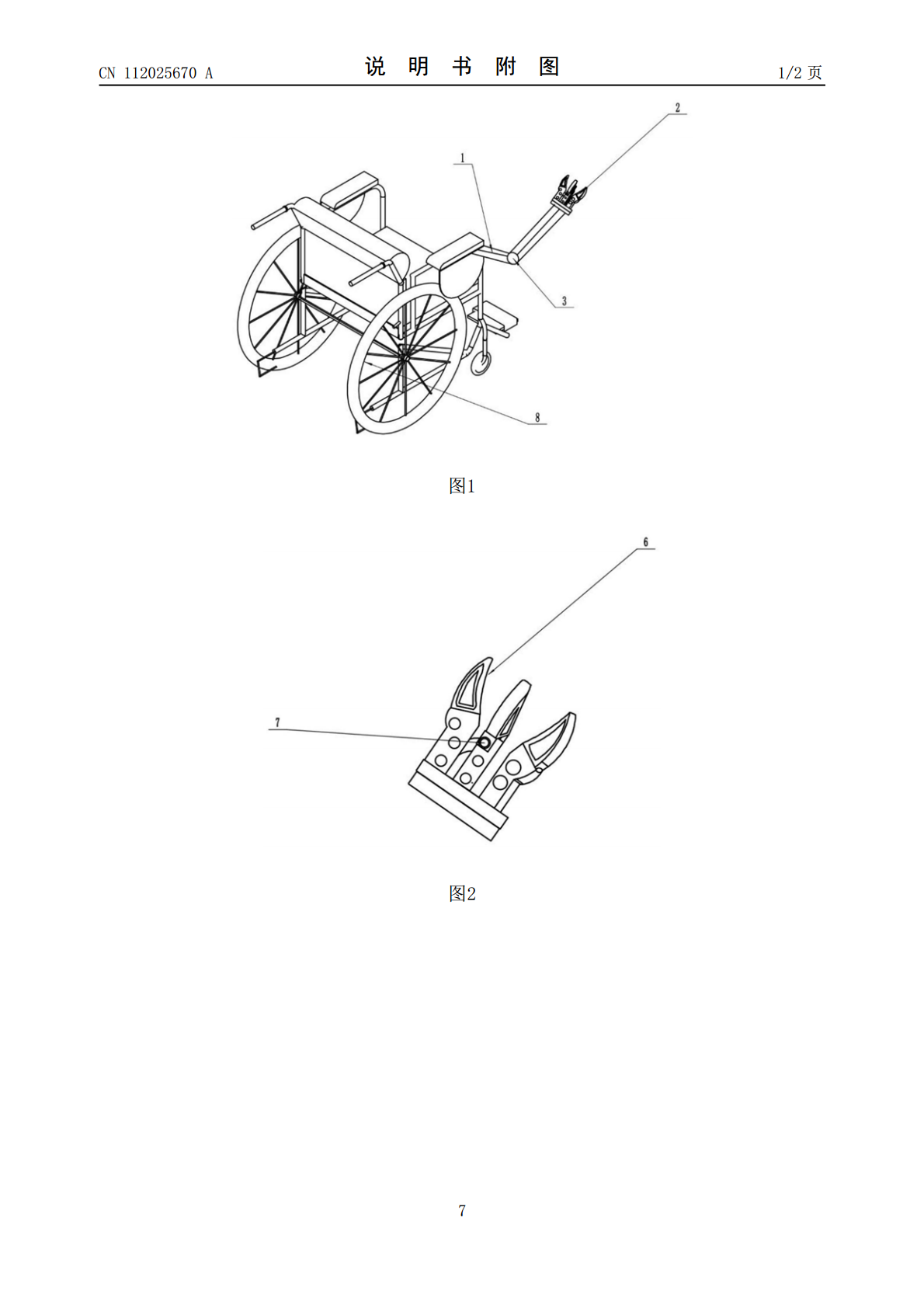
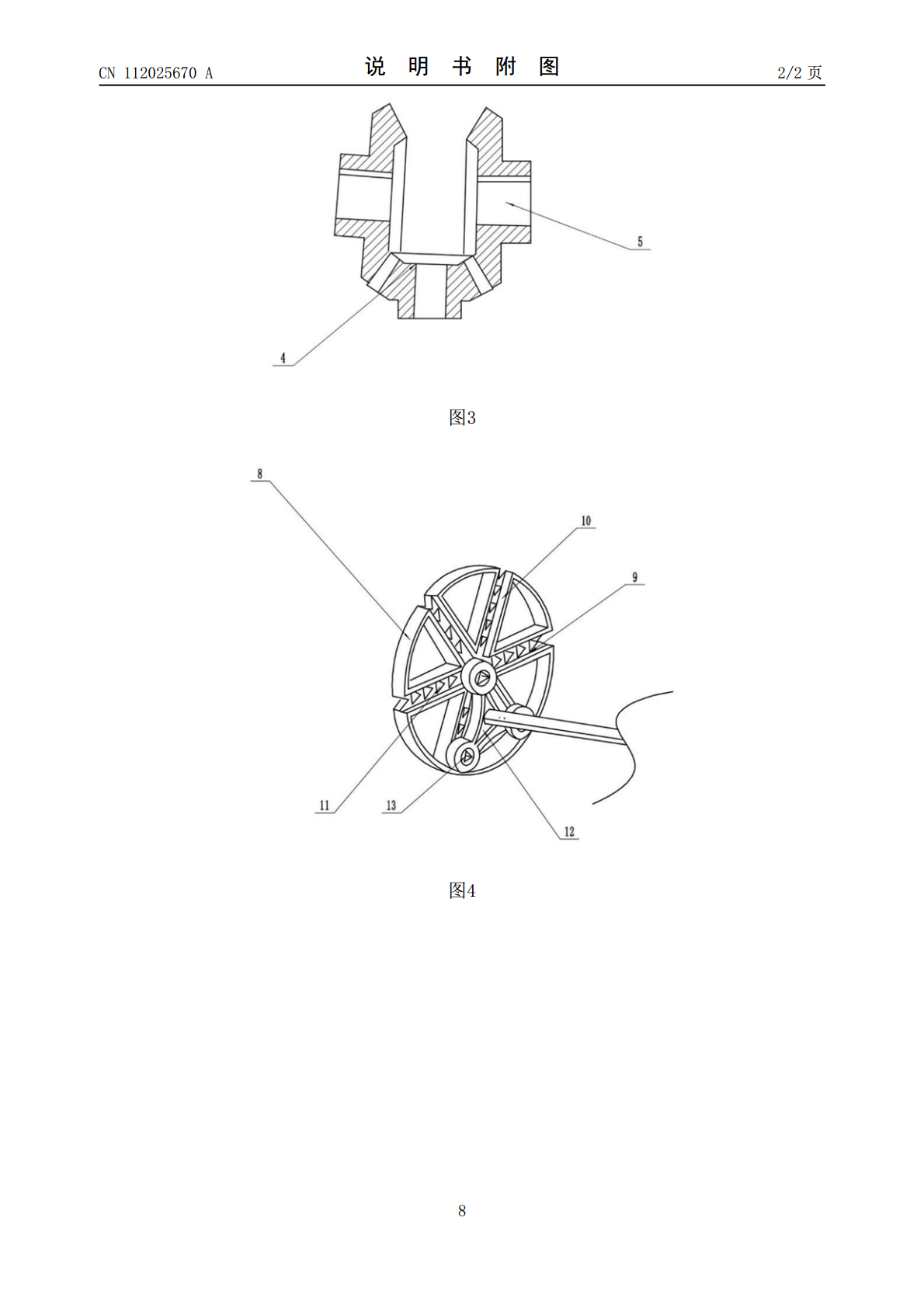
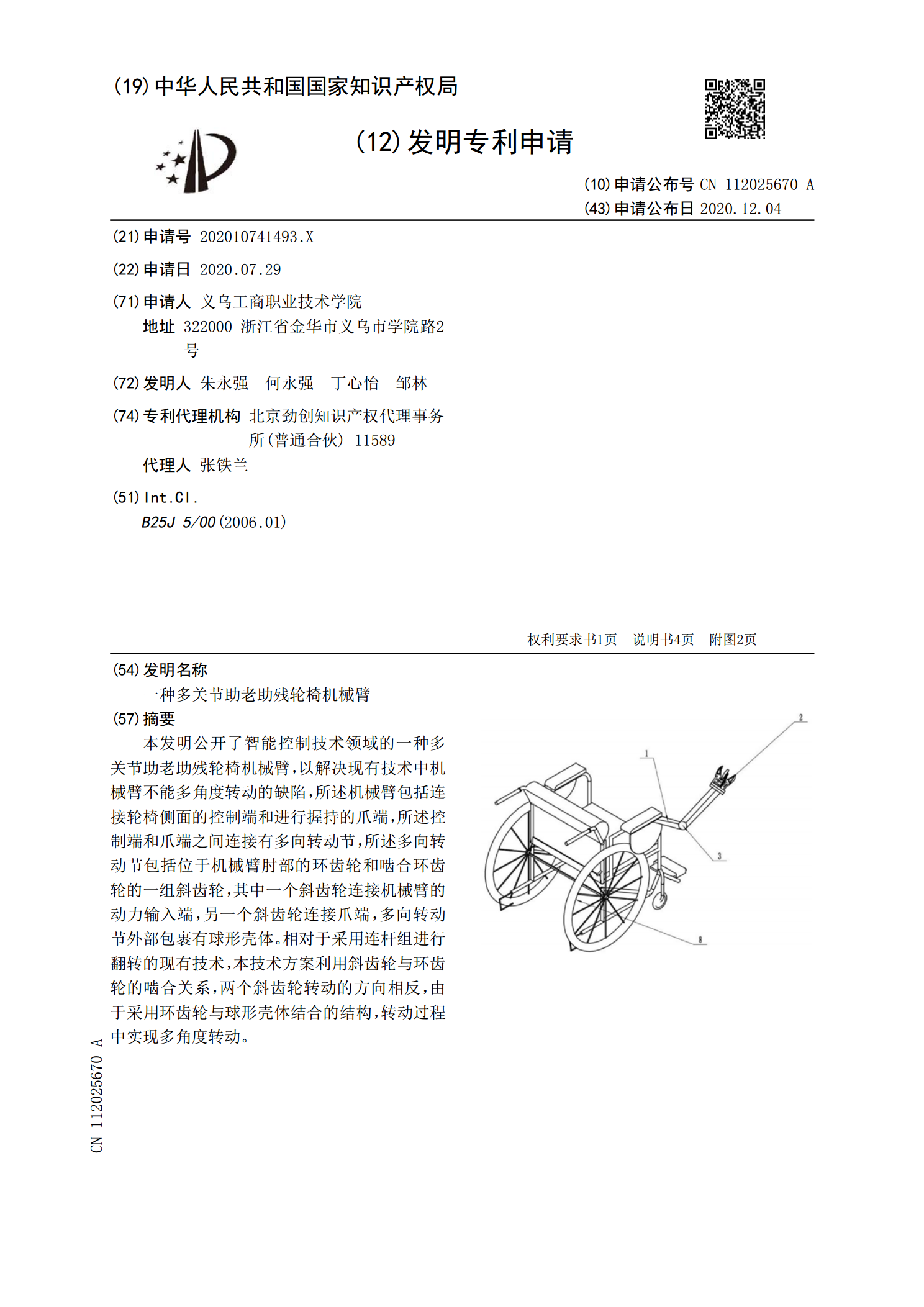
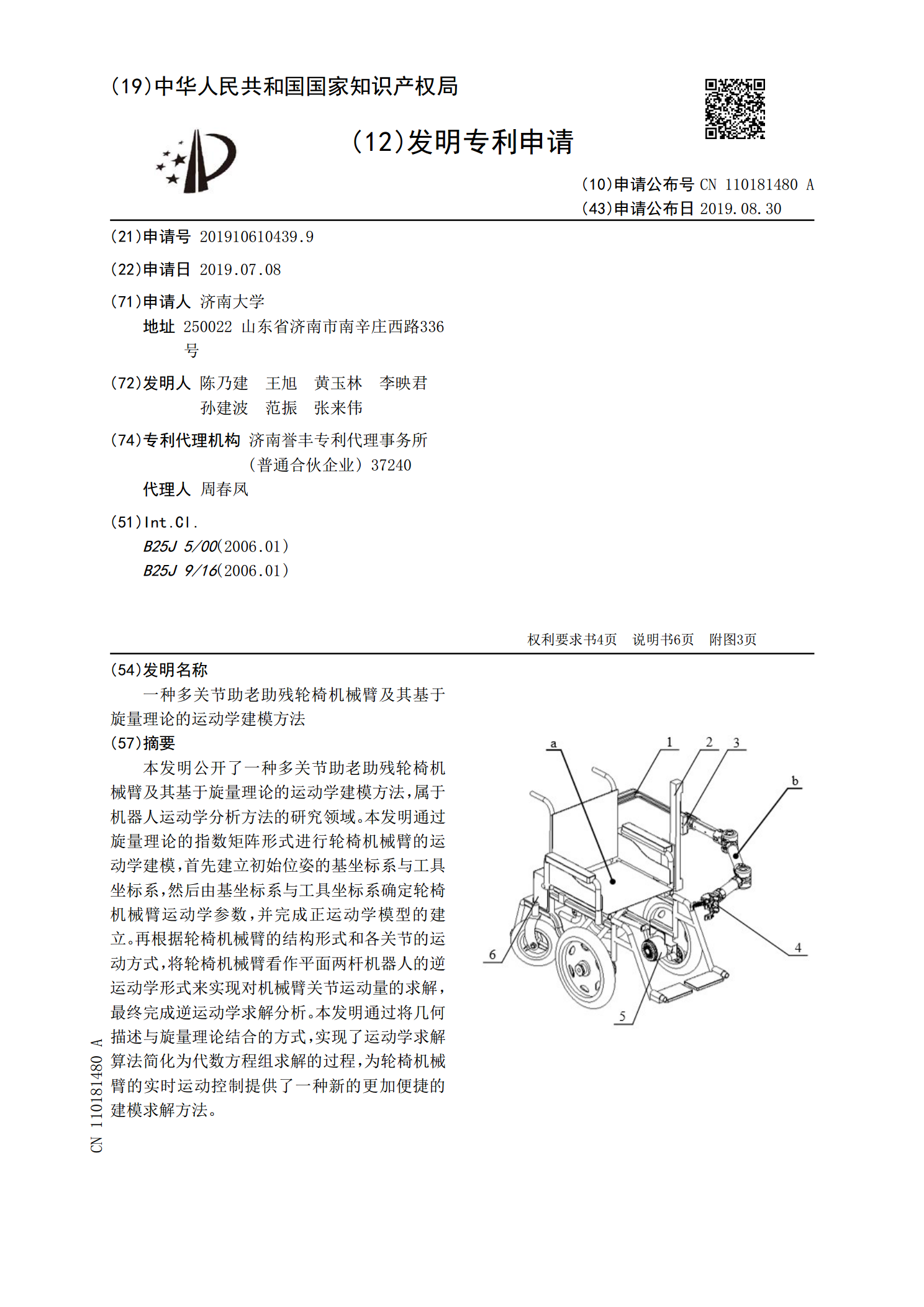
本发明公开了智能控制技术领域的一种多关节助老助残轮椅机械臂,以解决现有技术中机械臂不能多角度转动的缺陷,所述机械臂包括连接轮椅侧面的控制端和进行握持的爪端,所述控制端和爪端之间连接有多向转动节,所述多向转动节包括位于机械臂肘部的环齿轮和啮合环齿轮的一组斜齿轮,其中一个斜齿轮连接机械臂的动力输入端,另一个斜齿轮连接爪端,多向转动节外部包裹有球形壳体。相对于采用连杆组进行翻转的现有技术,本技术方案利用斜齿轮与环齿轮的啮合关系,两个斜齿轮转动的方向相反,由于采用环齿轮与球形壳体结合的结构,转动过程中实现多角度转
一种多关节助老助残轮椅机械臂及其基于旋量理论的运动学建模方法.pdf
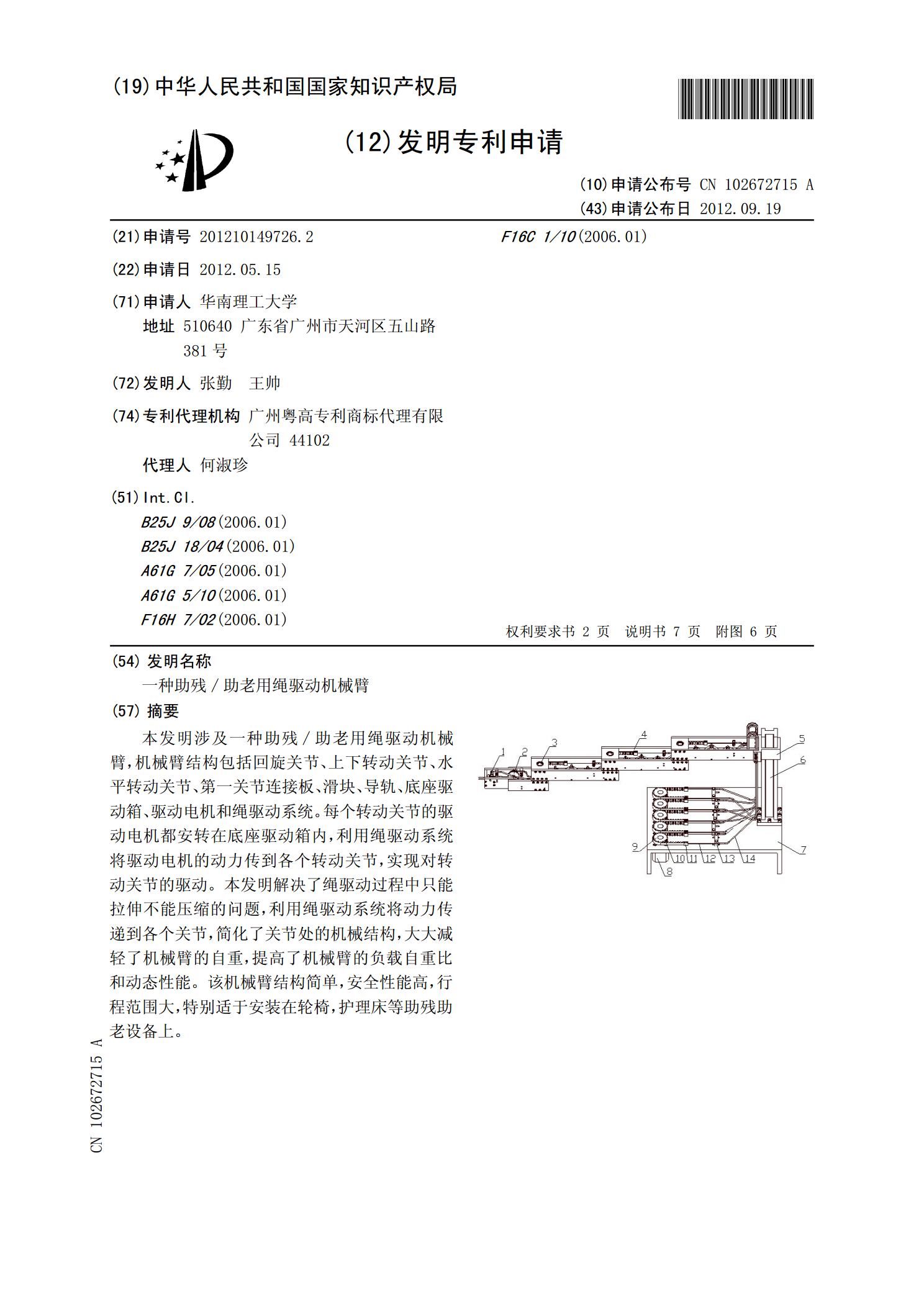
本发明公开了一种多关节助老助残轮椅机械臂及其基于旋量理论的运动学建模方法,属于机器人运动学分析方法的研究领域。本发明通过旋量理论的指数矩阵形式进行轮椅机械臂的运动学建模,首先建立初始位姿的基坐标系与工具坐标系,然后由基坐标系与工具坐标系确定轮椅机械臂运动学参数,并完成正运动学模型的建立。再根据轮椅机械臂的结构形式和各关节的运动方式,将轮椅机械臂看作平面两杆机器人的逆运动学形式来实现对机械臂关节运动量的求解,最终完成逆运动学求解分析。本发明通过将几何描述与旋量理论结合的方式,实现了运动学求解算法简化为代数方
一种助残/助老用绳驱动机械臂.pdf
本发明涉及一种助残/助老用绳驱动机械臂,机械臂结构包括回旋关节、上下转动关节、水平转动关节、第一关节连接板、滑块、导轨、底座驱动箱、驱动电机和绳驱动系统。每个转动关节的驱动电机都安转在底座驱动箱内,利用绳驱动系统将驱动电机的动力传到各个转动关节,实现对转动关节的驱动。本发明解决了绳驱动过程中只能拉伸不能压缩的问题,利用绳驱动系统将动力传递到各个关节,简化了关节处的机械结构,大大减轻了机械臂的自重,提高了机械臂的负载自重比和动态性能。该机械臂结构简单,安全性能高,行程范围大,特别适于安装在轮椅,护理床等助残
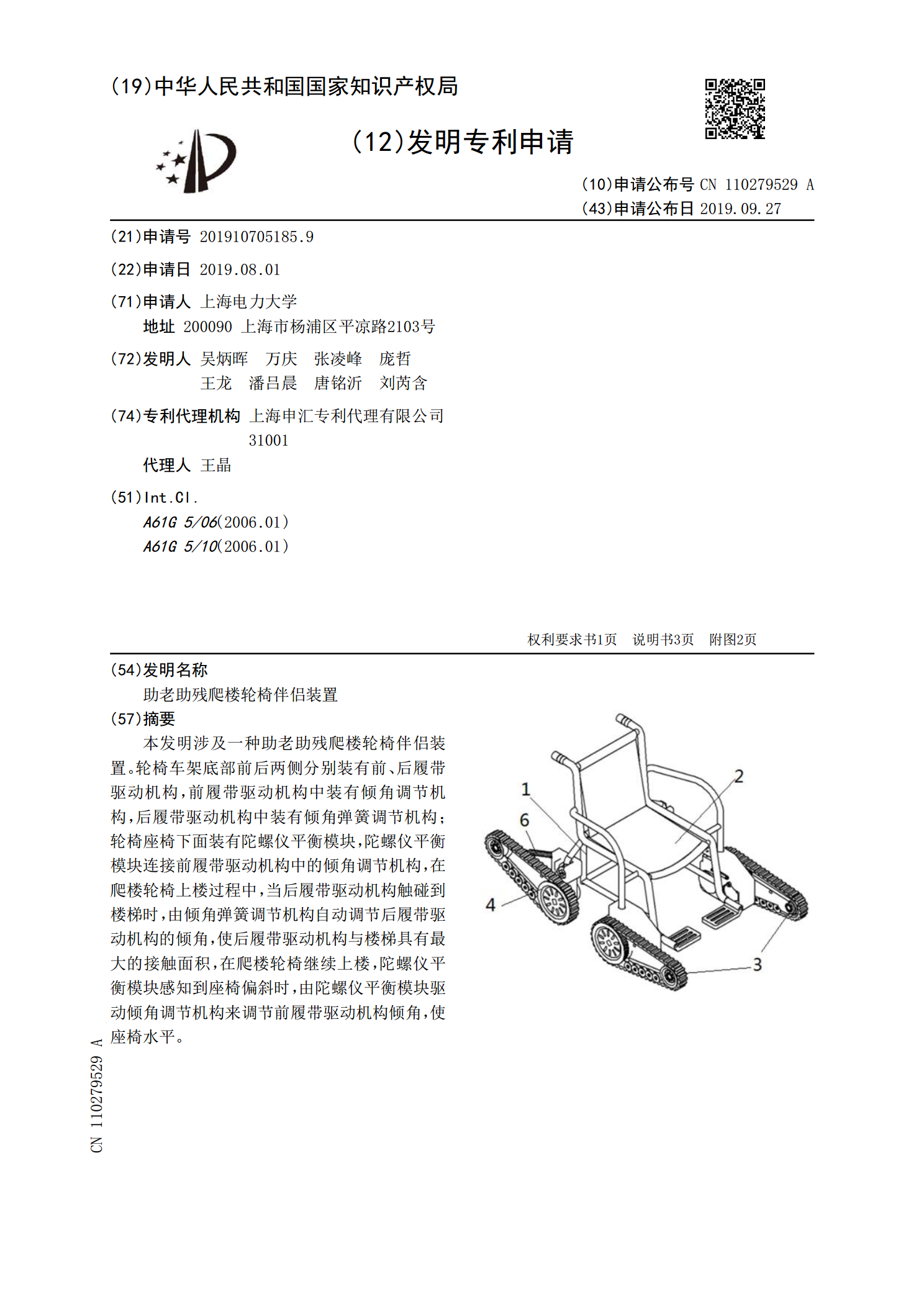
助老助残爬楼轮椅伴侣装置.pdf
本发明涉及一种助老助残爬楼轮椅伴侣装置。轮椅车架底部前后两侧分别装有前、后履带驱动机构,前履带驱动机构中装有倾角调节机构,后履带驱动机构中装有倾角弹簧调节机构;轮椅座椅下面装有陀螺仪平衡模块,陀螺仪平衡模块连接前履带驱动机构中的倾角调节机构,在爬楼轮椅上楼过程中,当后履带驱动机构触碰到楼梯时,由倾角弹簧调节机构自动调节后履带驱动机构的倾角,使后履带驱动机构与楼梯具有最大的接触面积,在爬楼轮椅继续上楼,陀螺仪平衡模块感知到座椅偏斜时,由陀螺仪平衡模块驱动倾角调节机构来调节前履带驱动机构倾角,使座椅水平。
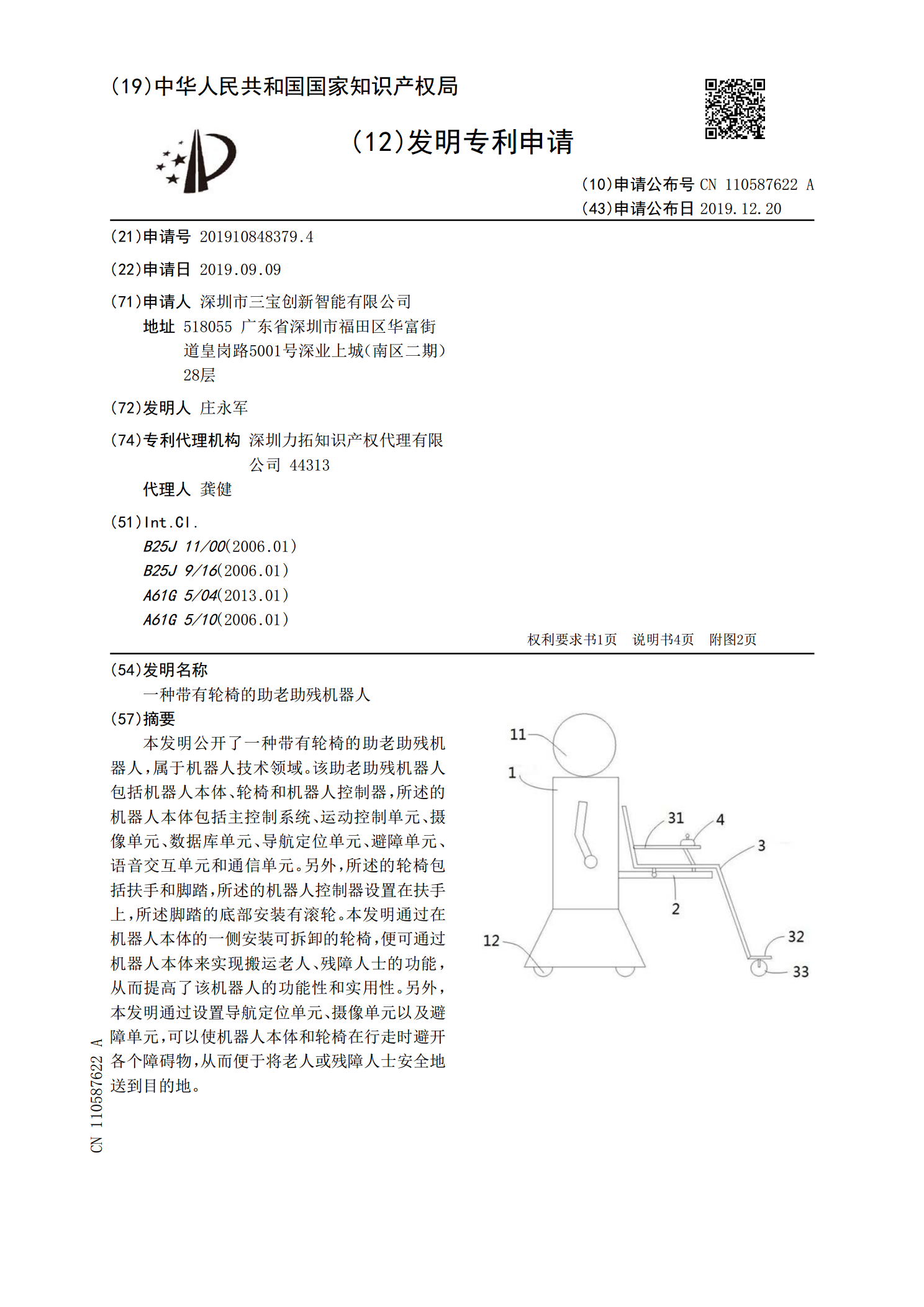
一种带有轮椅的助老助残机器人.pdf
本发明公开了一种带有轮椅的助老助残机器人,属于机器人技术领域。该助老助残机器人包括机器人本体、轮椅和机器人控制器,所述的机器人本体包括主控制系统、运动控制单元、摄像单元、数据库单元、导航定位单元、避障单元、语音交互单元和通信单元。另外,所述的轮椅包括扶手和脚踏,所述的机器人控制器设置在扶手上,所述脚踏的底部安装有滚轮。本发明通过在机器人本体的一侧安装可拆卸的轮椅,便可通过机器人本体来实现搬运老人、残障人士的功能,从而提高了该机器人的功能性和实用性。另外,本发明通过设置导航定位单元、摄像单元以及避障单元,可