
一种绳驱动外骨骼机械臂的臂长调节机构.pdf

一条****丹淑

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳驱动外骨骼机械臂的臂长调节机构.pdf
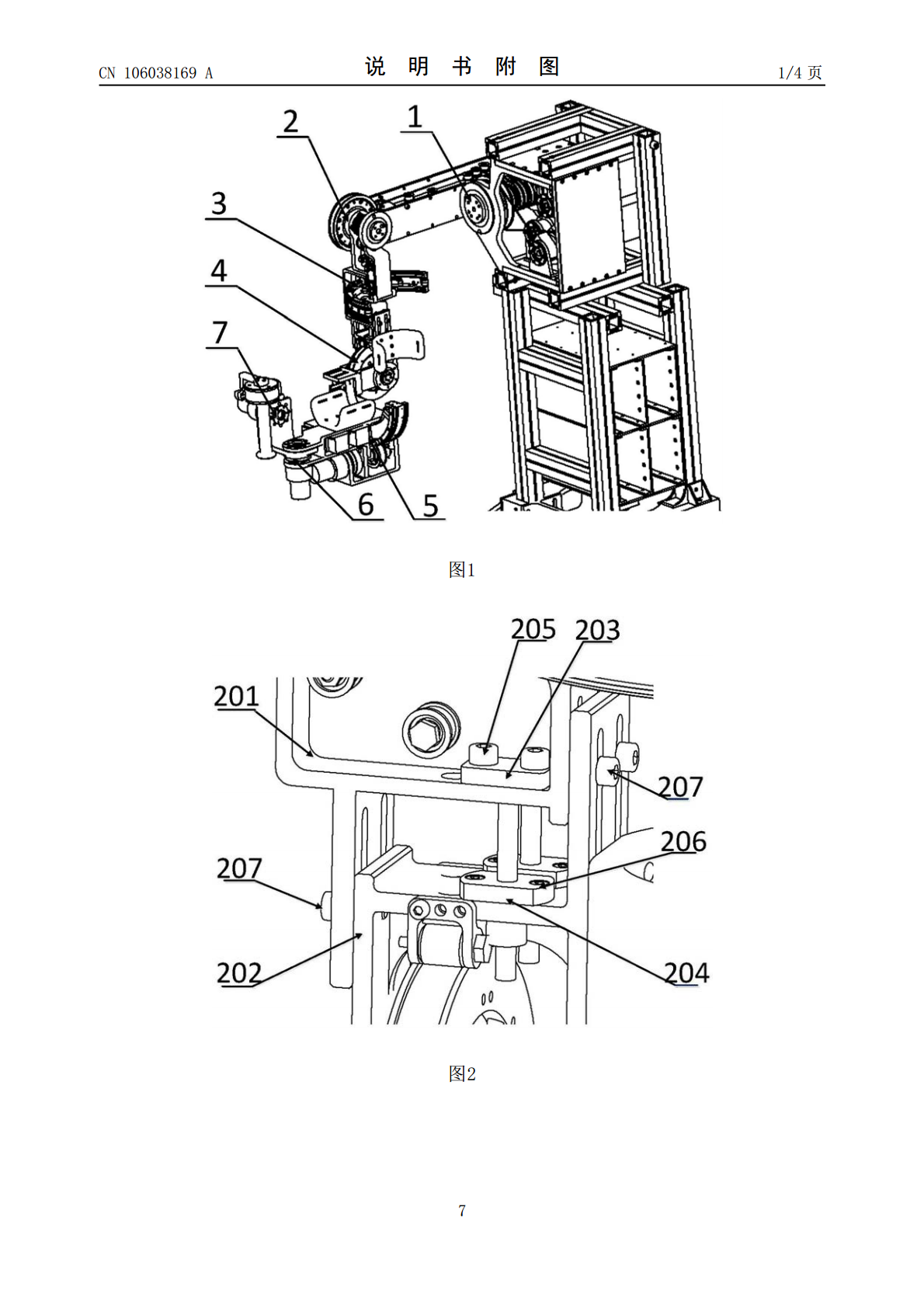
本发明公开了一种绳驱动外骨骼机械臂的臂长调节机构,通过臂杆下端(2)沿着滑轨(3)相对臂杆上端(1)运动调节臂杆的长度,同时调节蜗轮蜗杆张紧模块(8)保证钢丝绳的张紧。本发明旨在解决绳驱动外骨骼机械臂调节臂长同时保证钢丝绳张紧困难、张紧度难保证等问题。
一种绳驱动外骨骼机械臂的绳传动滑轮.pdf
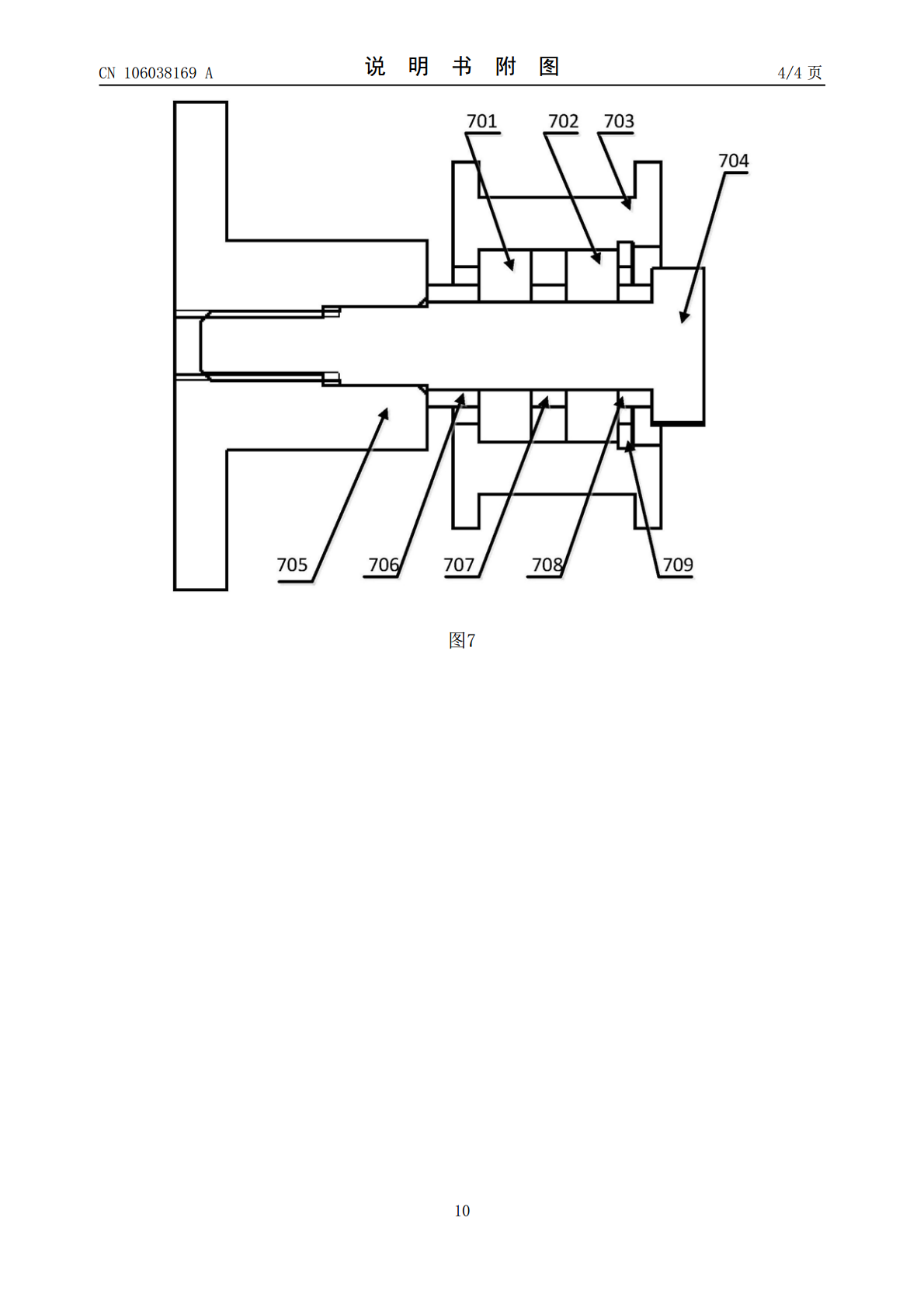
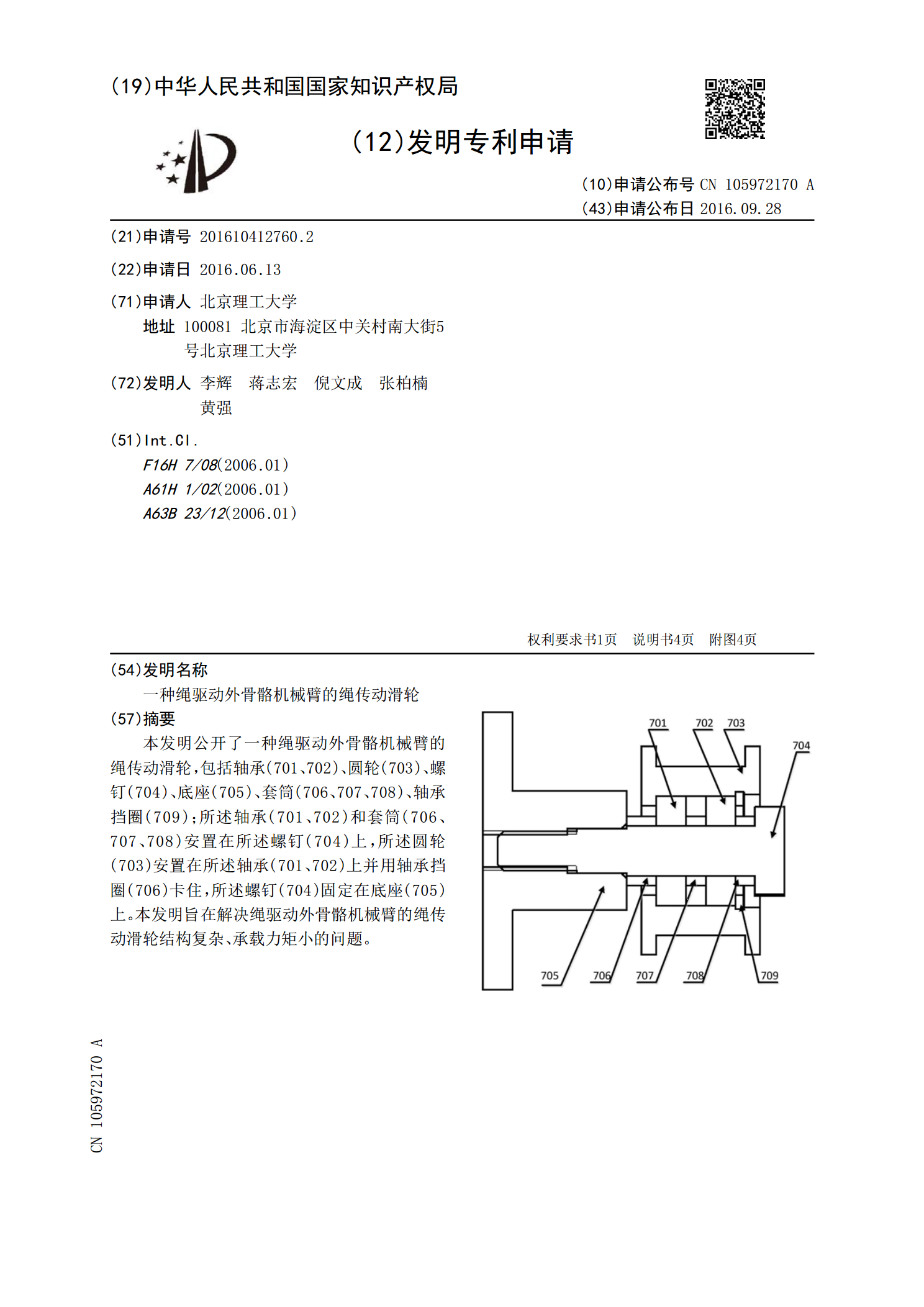
本发明公开了一种绳驱动外骨骼机械臂的绳传动滑轮,包括轴承(701、702)、圆轮(703)、螺钉(704)、底座(705)、套筒(706、707、708)、轴承挡圈(709);所述轴承(701、702)和套筒(706、707、708)安置在所述螺钉(704)上,所述圆轮(703)安置在所述轴承(701、702)上并用轴承挡圈(706)卡住,所述螺钉(704)固定在底座(705)上。本发明旨在解决绳驱动外骨骼机械臂的绳传动滑轮结构复杂、承载力矩小的问题。

一种绳驱动机械臂的传动绳预紧装置.pdf
本发明涉及绳驱动机器人领域。目的是提供一种绳驱动机械臂的传动绳预紧装置,该装置应具有结构简单、调节方便、可靠性好的特点。技术方案是:一种绳驱动机械臂的传动绳预紧装置,其特征在于:该装置包括固定在基板上的预紧块安装板、可转动地定位在预紧块安装板上的第一导向轮、可滑动地定位在预紧块安装板上的预紧块、可转动地定位在预紧块上的第二导向轮、用于推动预紧块沿着预紧块安装板表面移动的调节机构;所述调节机构包括固定在预紧块安装板上的连接块、设置在预紧块上的调节孔、可转动地定位在连接块上并与调节孔螺纹啮合的调节螺栓。
一种助残/助老用绳驱动机械臂.pdf
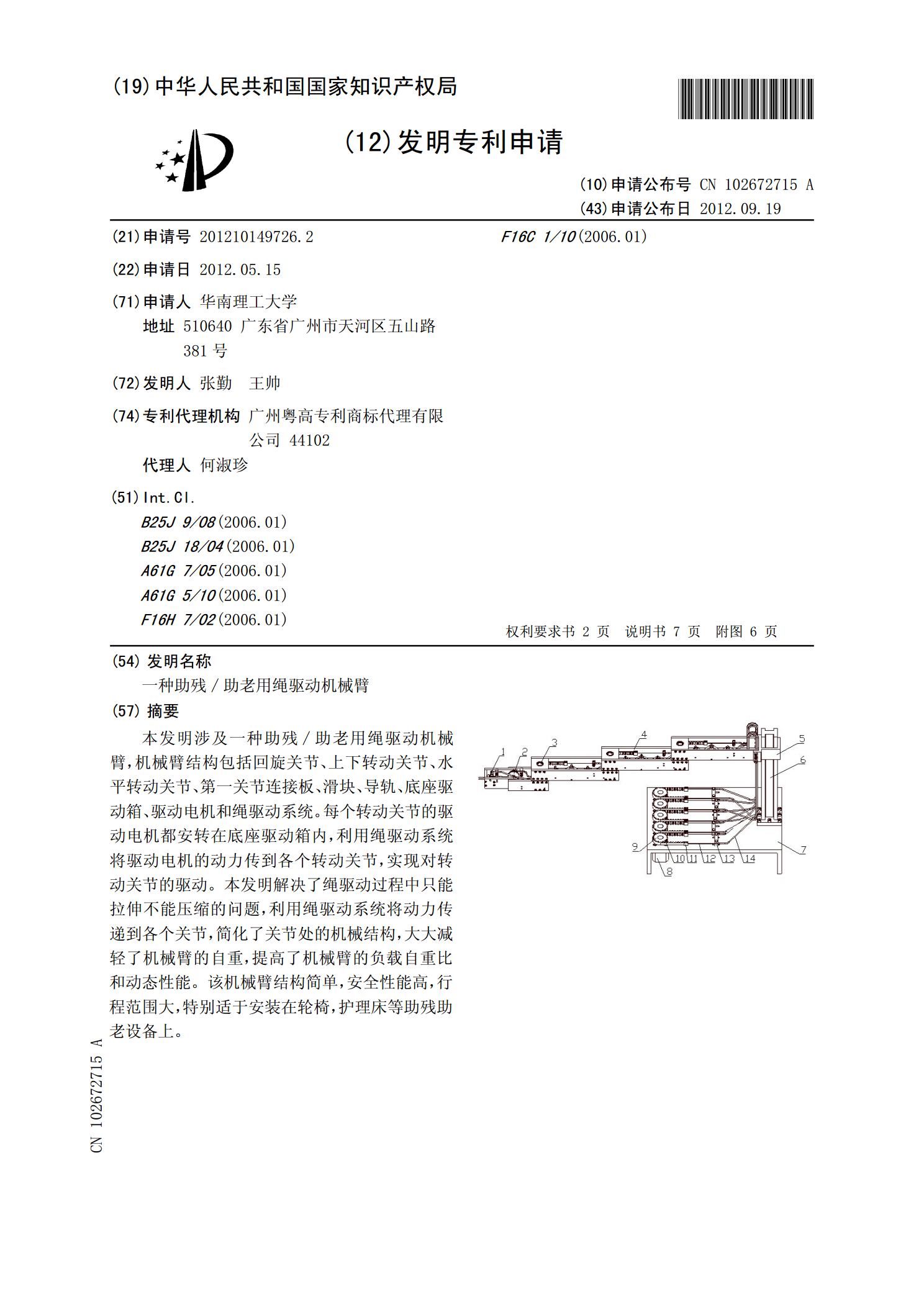
本发明涉及一种助残/助老用绳驱动机械臂,机械臂结构包括回旋关节、上下转动关节、水平转动关节、第一关节连接板、滑块、导轨、底座驱动箱、驱动电机和绳驱动系统。每个转动关节的驱动电机都安转在底座驱动箱内,利用绳驱动系统将驱动电机的动力传到各个转动关节,实现对转动关节的驱动。本发明解决了绳驱动过程中只能拉伸不能压缩的问题,利用绳驱动系统将动力传递到各个关节,简化了关节处的机械结构,大大减轻了机械臂的自重,提高了机械臂的负载自重比和动态性能。该机械臂结构简单,安全性能高,行程范围大,特别适于安装在轮椅,护理床等助残

基于绳驱动机械臂的研究与设计.docx
基于绳驱动机械臂的研究与设计基于绳驱动机械臂的研究与设计摘要:机械臂已经广泛应用于工业制造、医疗服务、物流配送等领域,对于提高生产效率、减轻劳动强度起着重要的作用。本文以绳驱动机械臂为基础,对其研究与设计进行了探讨。首先,介绍了绳驱动机械臂的原理和构造。然后,分析了绳驱动机械臂的优势和不足之处。接着,通过数学建模和力学分析,对绳驱动机械臂的运动学和动力学进行了研究。最后,设计了一款基于绳驱动的机械臂,并对其性能进行了测试和评估。实验结果表明,绳驱动机械臂具有良好的运动灵活性和动力响应性,适合于一些特殊环境