
全方位移动平台.pdf

静芙****可爱

1/9

2/9

3/9

4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全方位移动平台.pdf
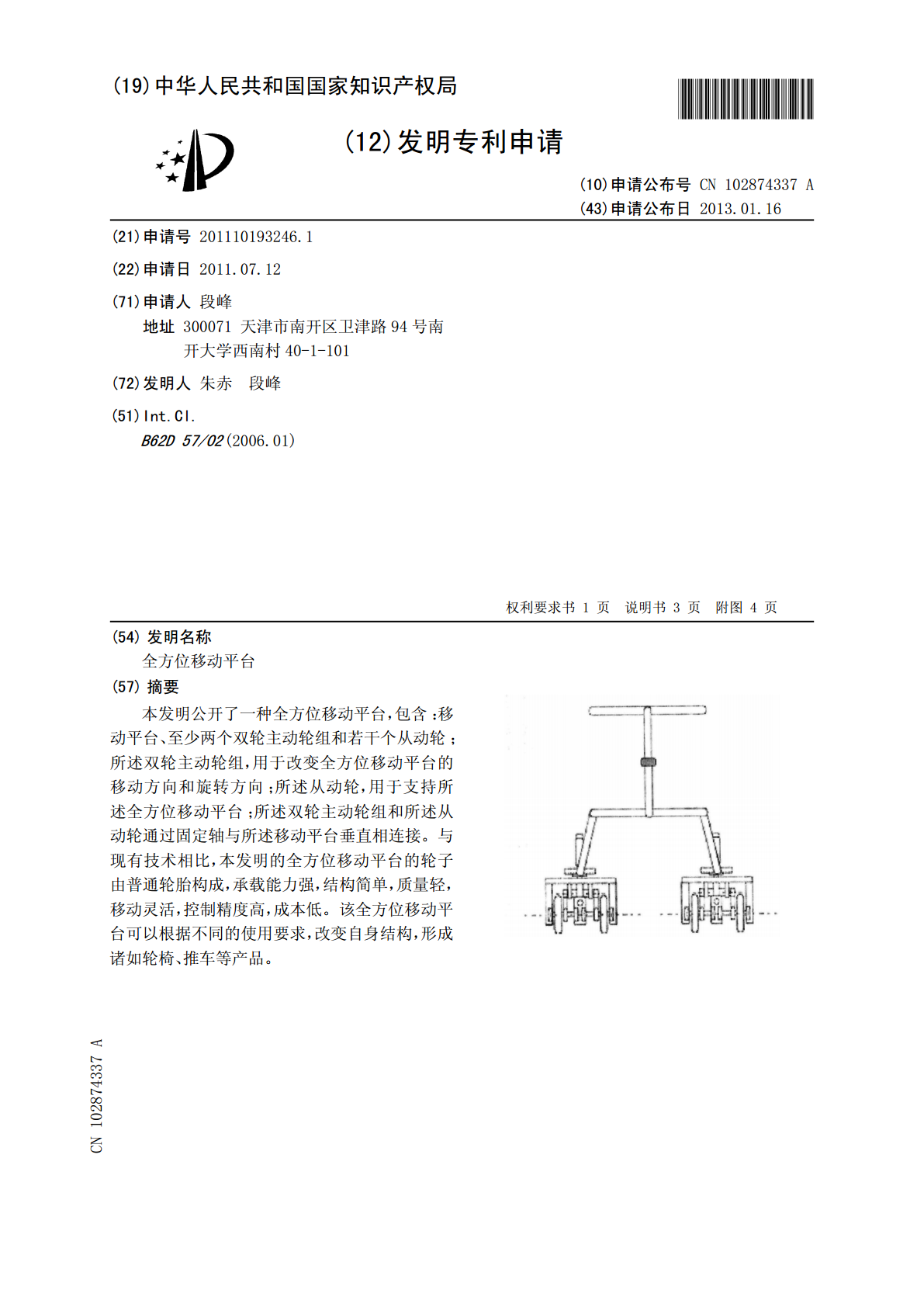
本发明公开了一种全方位移动平台,包含:移动平台、至少两个双轮主动轮组和若干个从动轮;所述双轮主动轮组,用于改变全方位移动平台的移动方向和旋转方向;所述从动轮,用于支持所述全方位移动平台;所述双轮主动轮组和所述从动轮通过固定轴与所述移动平台垂直相连接。与现有技术相比,本发明的全方位移动平台的轮子由普通轮胎构成,承载能力强,结构简单,质量轻,移动灵活,控制精度高,成本低。该全方位移动平台可以根据不同的使用要求,改变自身结构,形成诸如轮椅、推车等产品。

全方位移动平台.pdf
本发明涉及一种叉车控制平台,公开了一种全方位移动平台。该全方位移动平台应用X-BY-Wire技术,提高平台的可靠性。平台具有操纵杆直接控制和人机界面遥控两种控制模式,动力电池组通过电缆与综合控制器及多个电机控制器相连,为其提供电能;CAN总线将综合控制器、电机控制器连在一起,形成信号控制网络;综合控制器完成综合控制算法,通过CAN总线与电机控制器相连;电机控制器通过三相电缆、传感器信号线与电机相连;电机通过减速器驱动全方位轮转动。按照本发明的技术方案,全方位移动平台应用在叉车上,使得叉车控制的精确性更高,

带举架全方位移动平台.pdf
本发明的目的在于提供带举架全方位移动平台。本发明包括底盘、轮和驱动电机,其特征是:还包括后举架、摆杆、蜗轮蜗杆、升降滑道和定向驱动轮,轮安装在底盘下方,升降滑道安装在底盘上,摆杆的一端通过蜗轮蜗杆安装在升降滑道上、另一端和后举架相连,后举架的两端分别安装定向驱动轮,在轮和定向驱动轮处分别安装驱动电机。本发明带举架全方位移动平台移动灵活,具备了翻越坡面等障碍物的功能,拓展了作业范围和工作环境。

一种全方位轮及全方位移动平台.pdf
本发明的全方位轮,包括驱动轴和安装于驱动轴上的轮体,轮体是由位于下部的圆锥台和位于上部的侧面为球面的圆台一体制成,圆锥台和圆台的大圆面等大且共面,圆锥台的底部小圆面可旋转地安装在驱动轴上,轮体的个数为8个,其中四个轮体组成第一组轮,剩余四个轮体组成第二组轮,第一组轮的四个轮体关于驱动轴的轴线呈中心对称分布,四个轮体的圆锥台的侧面依次相抵靠并形成封闭结构,第二组轮位于第一组轮的左或右侧,第二组轮的四个轮体布置安装结构与第一组轮相同,第一组轮的四个轮体的中轴线与第二组轮的四个轮体的中轴线以45度角度差交错分布

履带式全方位移动平台.pdf
一种履带式全方位移动平台,其主要由移动机构、控制子系统、驱动子系统和电源子系统构成,所述移动机构由多个全方位移动履带构成,所述多个全方位移动履带以类似汽车的四轮轮组结构排布。所述全方位移动履带主要由主动轮(12)、履带板(13)、辊子(14)、负重轮(15)、拖带轮(16)以及诱导轮(17)构成。所述辊子(14)固定在每个履带板的辊子支架(23)上,其转动轴线与所述全方位移动履带的主动轮(12)的轴线设置成一定的夹角,形成所述辊子(14)的偏置角。