
一种沿分裂导线的巡检作业机器人系统.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种沿分裂导线的巡检作业机器人系统.pdf
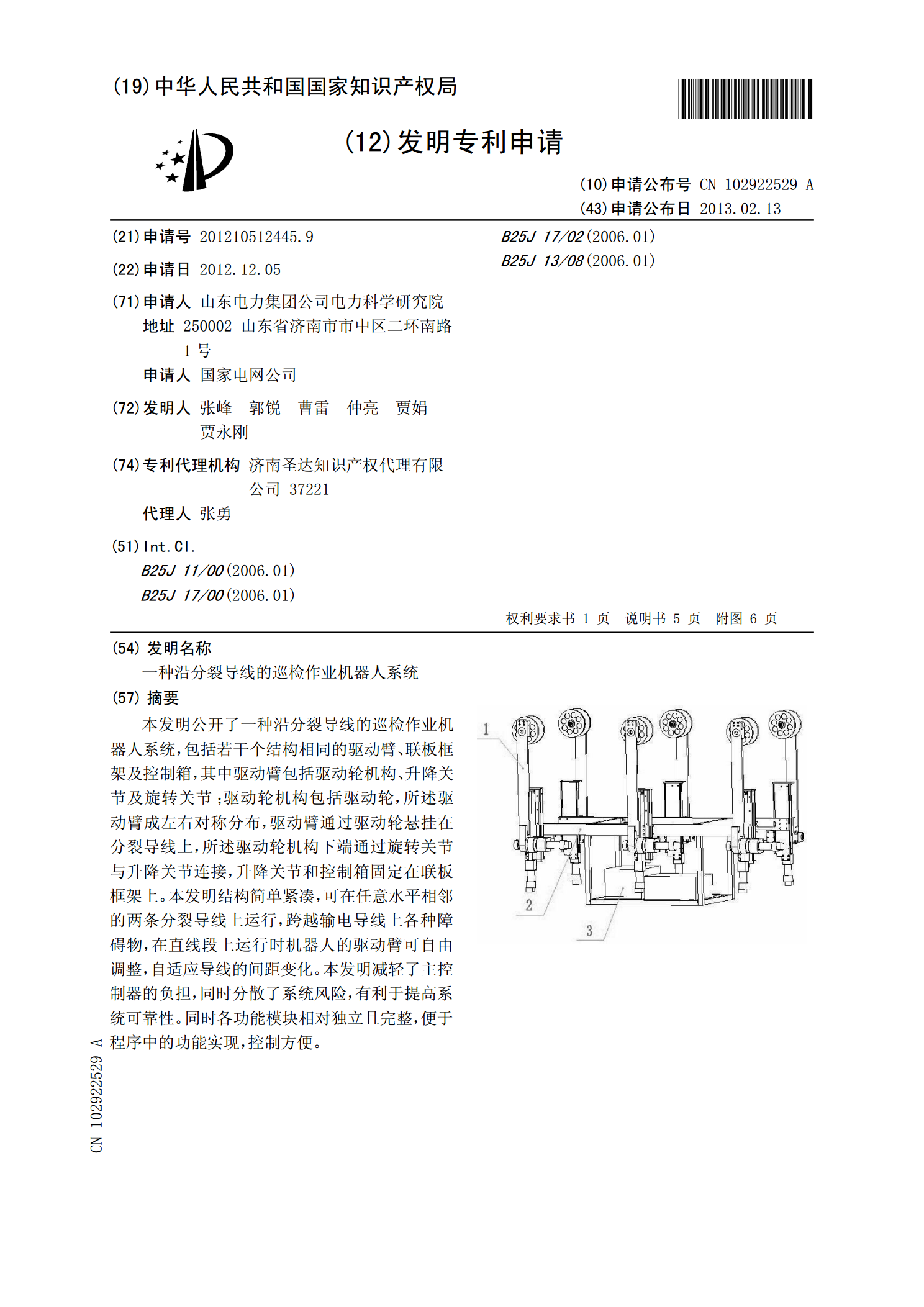
本发明公开了一种沿分裂导线的巡检作业机器人系统,包括若干个结构相同的驱动臂、联板框架及控制箱,其中驱动臂包括驱动轮机构、升降关节及旋转关节;驱动轮机构包括驱动轮,所述驱动臂成左右对称分布,驱动臂通过驱动轮悬挂在分裂导线上,所述驱动轮机构下端通过旋转关节与升降关节连接,升降关节和控制箱固定在联板框架上。本发明结构简单紧凑,可在任意水平相邻的两条分裂导线上运行,跨越输电导线上各种障碍物,在直线段上运行时机器人的驱动臂可自由调整,自适应导线的间距变化。本发明减轻了主控制器的负担,同时分散了系统风险,有利于提高系

一种分裂导线巡检作业机器人平台.pdf
本发明公开了一种分裂导线巡检作业机器人平台,它包括六个相同的驱动臂、联板框架和电池控制箱,所述六个驱动臂对称的安装在联板框架的两侧,所述电池控制箱与所有用电设备连接,所述驱动臂包括驱动轮机构,驱动轮机构通过旋转关节与升降关节连接,升降关节固定在联板框架上,所述六个驱动臂成前中后排列且左右对称分布,前臂和中臂及中臂和后臂的有效距离稍大于输电线上最大障碍物的长度。本发明由于采用六个结构相同且左右对称的驱动臂,结构简单紧凑,在任意水平相邻的两条分裂导线上运行,跨越输电导线上各种障碍物,在直线段上运行时机器人的驱

500kV分裂导线巡检作业机器人平台.pdf
本发明具体公开了一种500kV分裂导线巡检作业机器人平台,包括6个结构相同的驱动臂、联板框架及电池控制箱,所述的每个驱动臂都包括结构相同的驱动轮机构、升降关节、旋转关节、导向轮机构及导槽;每个驱动臂通过驱动轮机构悬挂在分裂导线上,所述驱动轮机构下端通过旋转关节与升降关节连接,升降关节固定在联板框架上;所述每个驱动臂上都安装有导向轮机构,导向轮结构能沿固定在联板框架上的导槽滑动。本发明的有益效果是:该机器人运行时横跨在两根分裂导线上,即使重心发生偏移也能保证机器人的运行姿态,安全平稳,有利于在机器人上集成检

一种高空作业巡检机器人上下线系统.pdf
本发明公开了一种高空作业巡检机器人上下线系统,包括塔杆和吊篮,所述吊篮通过起吊装置挂载在所述塔杆上,所述吊篮包括箱体,在所述箱体的顶部安装有支撑杆,在所述吊篮的箱体外侧安装有等电位装置。本发明中设置等电位装置,巡检机器人在相线上线之前,等电位装置的绝缘杆率先接触相线,使整个装置与相线处于等相位状态,避免巡检机器人上线受阻。
一种巡检机器人系统.pdf
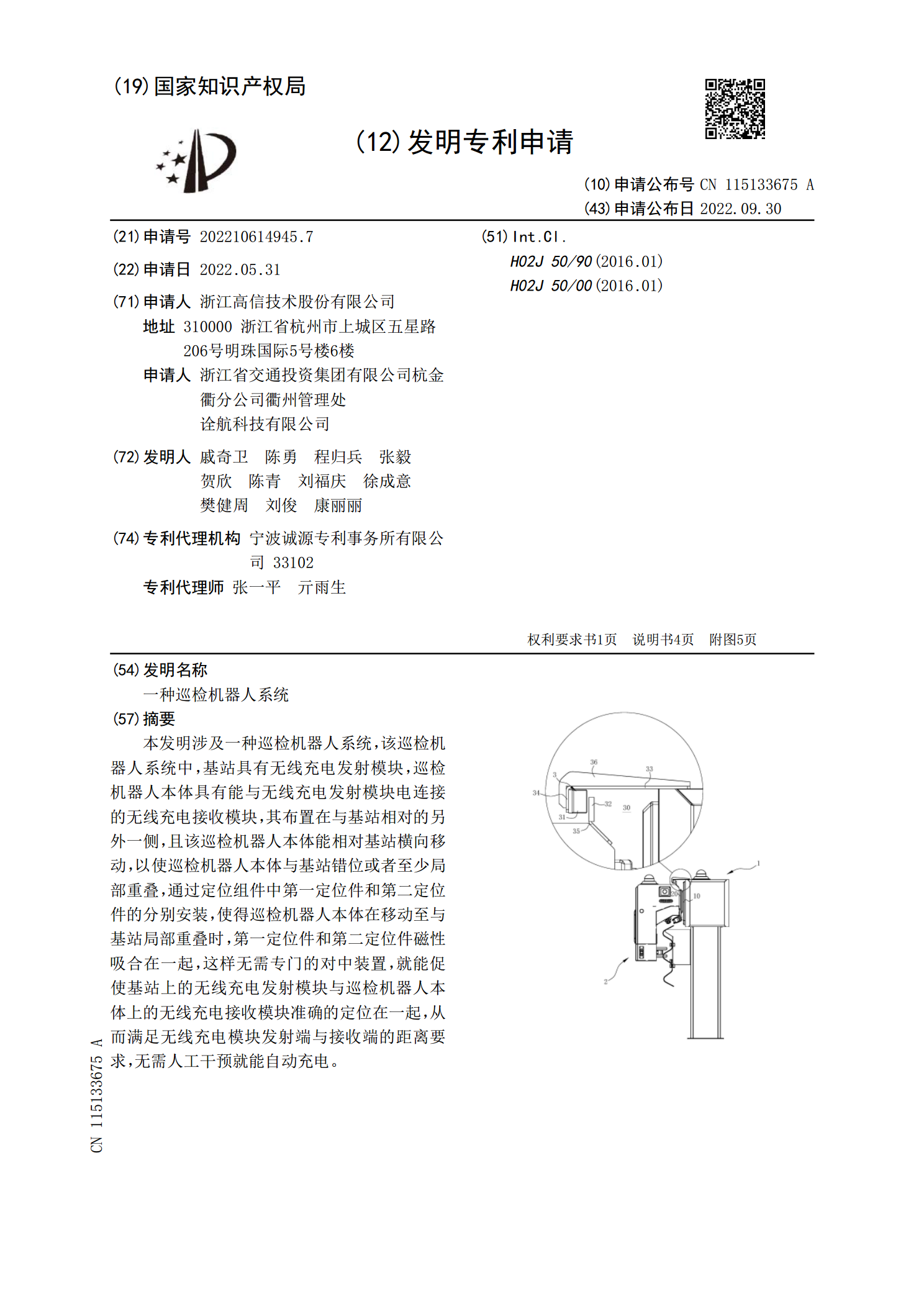
本发明涉及一种巡检机器人系统,该巡检机器人系统中,基站具有无线充电发射模块,巡检机器人本体具有能与无线充电发射模块电连接的无线充电接收模块,其布置在与基站相对的另外一侧,且该巡检机器人本体能相对基站横向移动,以使巡检机器人本体与基站错位或者至少局部重叠,通过定位组件中第一定位件和第二定位件的分别安装,使得巡检机器人本体在移动至与基站局部重叠时,第一定位件和第二定位件磁性吸合在一起,这样无需专门的对中装置,就能促使基站上的无线充电发射模块与巡检机器人本体上的无线充电接收模块准确的定位在一起,从而满足无线充电