
一种分裂导线巡检作业机器人平台.pdf

宜然****找我

1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种分裂导线巡检作业机器人平台.pdf
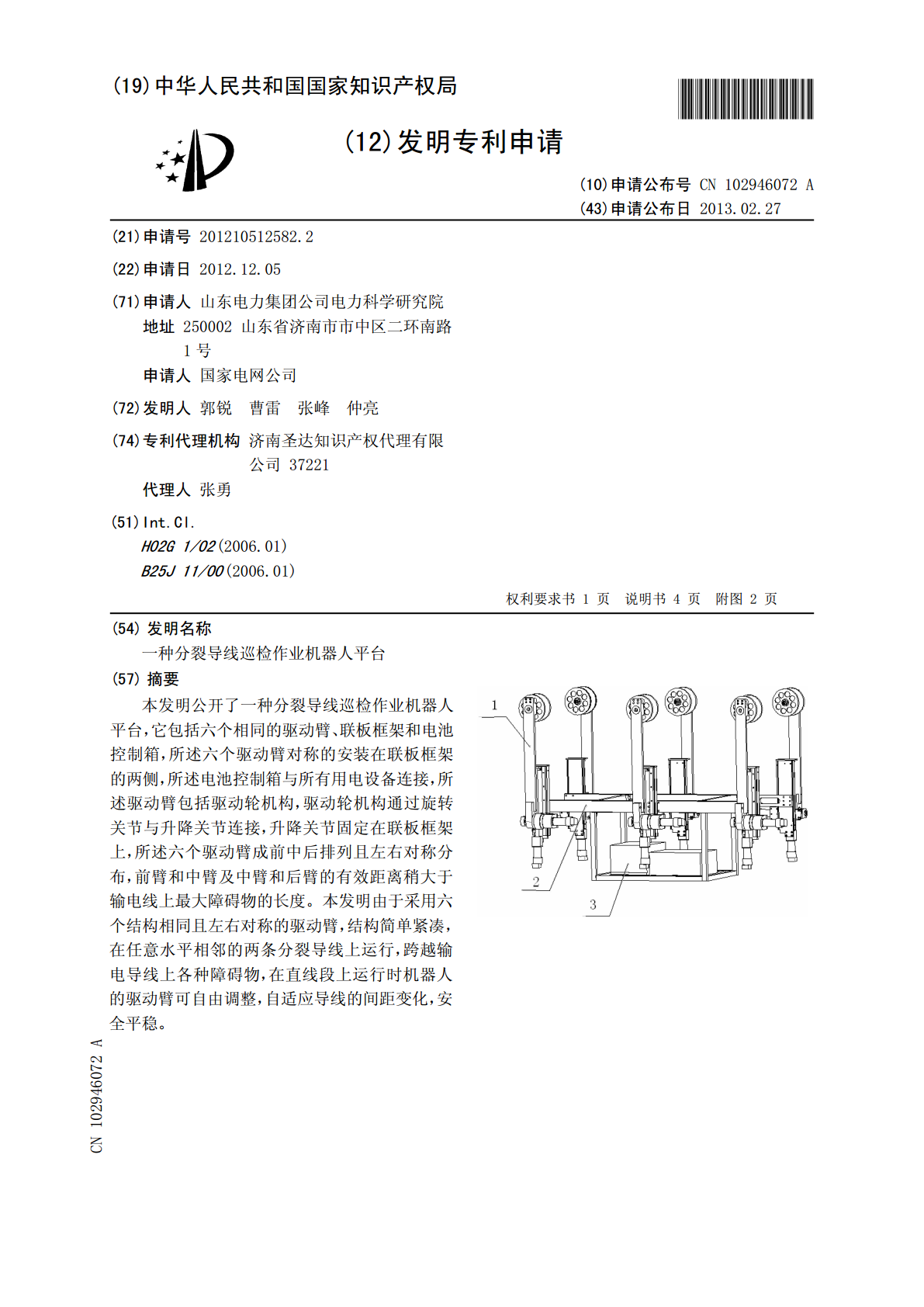
本发明公开了一种分裂导线巡检作业机器人平台,它包括六个相同的驱动臂、联板框架和电池控制箱,所述六个驱动臂对称的安装在联板框架的两侧,所述电池控制箱与所有用电设备连接,所述驱动臂包括驱动轮机构,驱动轮机构通过旋转关节与升降关节连接,升降关节固定在联板框架上,所述六个驱动臂成前中后排列且左右对称分布,前臂和中臂及中臂和后臂的有效距离稍大于输电线上最大障碍物的长度。本发明由于采用六个结构相同且左右对称的驱动臂,结构简单紧凑,在任意水平相邻的两条分裂导线上运行,跨越输电导线上各种障碍物,在直线段上运行时机器人的驱

500kV分裂导线巡检作业机器人平台.pdf
本发明具体公开了一种500kV分裂导线巡检作业机器人平台,包括6个结构相同的驱动臂、联板框架及电池控制箱,所述的每个驱动臂都包括结构相同的驱动轮机构、升降关节、旋转关节、导向轮机构及导槽;每个驱动臂通过驱动轮机构悬挂在分裂导线上,所述驱动轮机构下端通过旋转关节与升降关节连接,升降关节固定在联板框架上;所述每个驱动臂上都安装有导向轮机构,导向轮结构能沿固定在联板框架上的导槽滑动。本发明的有益效果是:该机器人运行时横跨在两根分裂导线上,即使重心发生偏移也能保证机器人的运行姿态,安全平稳,有利于在机器人上集成检
一种沿分裂导线的巡检作业机器人系统.pdf
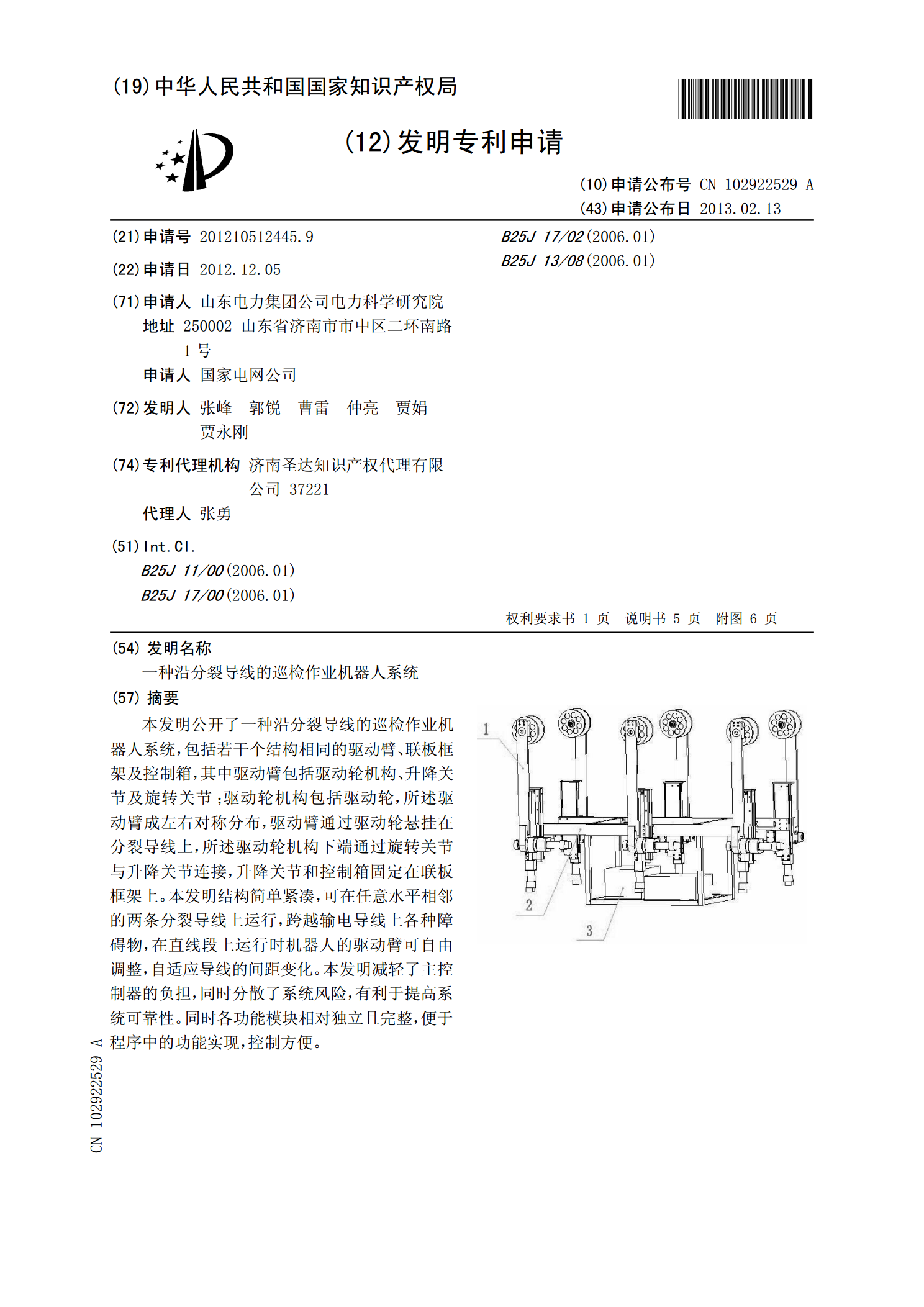
本发明公开了一种沿分裂导线的巡检作业机器人系统,包括若干个结构相同的驱动臂、联板框架及控制箱,其中驱动臂包括驱动轮机构、升降关节及旋转关节;驱动轮机构包括驱动轮,所述驱动臂成左右对称分布,驱动臂通过驱动轮悬挂在分裂导线上,所述驱动轮机构下端通过旋转关节与升降关节连接,升降关节和控制箱固定在联板框架上。本发明结构简单紧凑,可在任意水平相邻的两条分裂导线上运行,跨越输电导线上各种障碍物,在直线段上运行时机器人的驱动臂可自由调整,自适应导线的间距变化。本发明减轻了主控制器的负担,同时分散了系统风险,有利于提高系
垂直双分裂导线出线作业平台.pdf
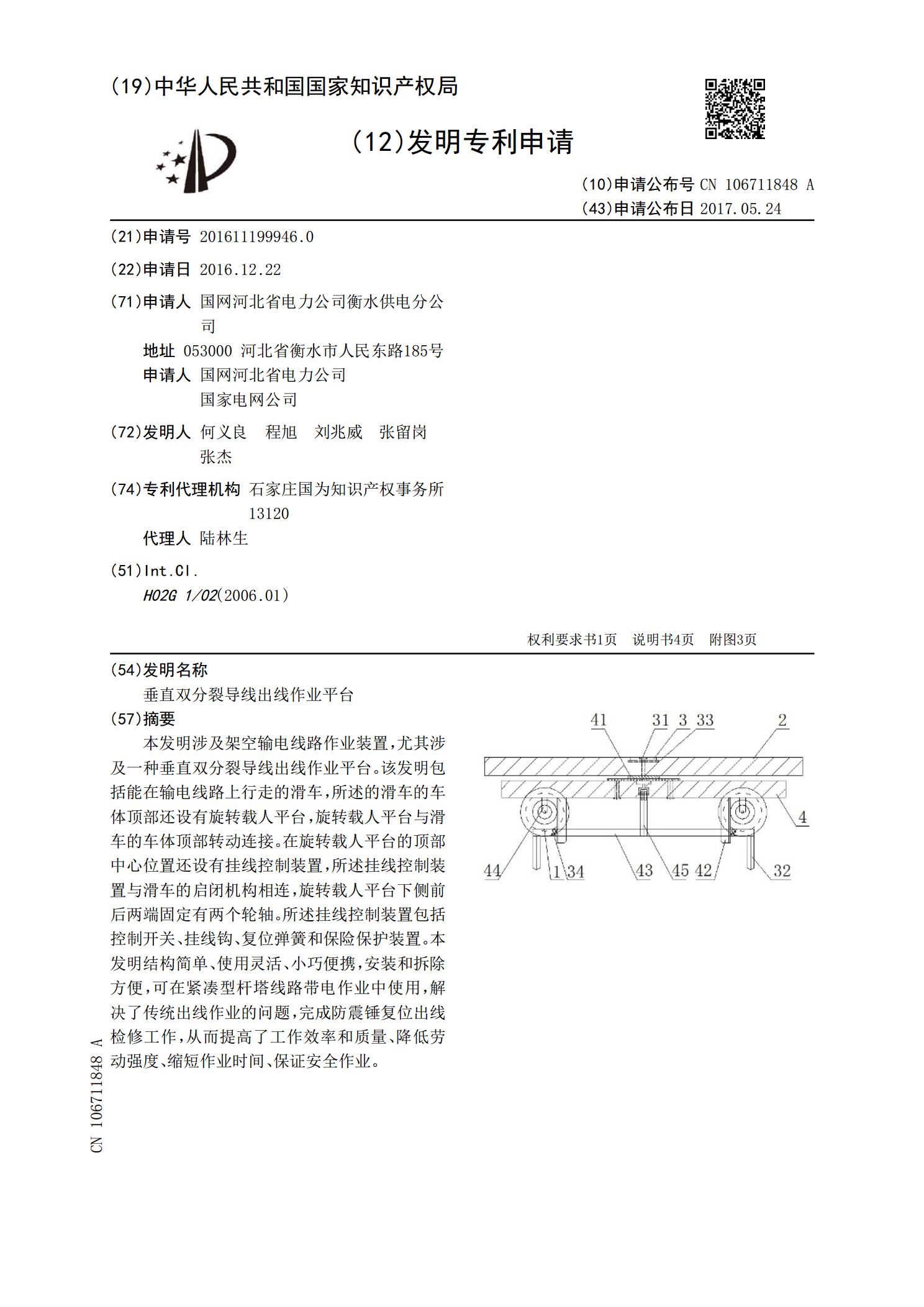
本发明涉及架空输电线路作业装置,尤其涉及一种垂直双分裂导线出线作业平台。该发明包括能在输电线路上行走的滑车,所述的滑车的车体顶部还设有旋转载人平台,旋转载人平台与滑车的车体顶部转动连接。在旋转载人平台的顶部中心位置还设有挂线控制装置,所述挂线控制装置与滑车的启闭机构相连,旋转载人平台下侧前后两端固定有两个轮轴。所述挂线控制装置包括控制开关、挂线钩、复位弹簧和保险保护装置。本发明结构简单、使用灵活、小巧便携,安装和拆除方便,可在紧凑型杆塔线路带电作业中使用,解决了传统出线作业的问题,完成防震锤复位出线检修工

一种用于双分裂及以上多分裂导线的空中作业平台.pdf
本发明公开了一种用于双分裂及以上多分裂导线的空中作业平台,所述空中作业平台包括吊框以及设置在吊框四个角上的导线夹紧装置;每个导线夹紧装置包括位于吊框顶端的倒U形吊臂、由电机提供动力的上滑轮、下滑轮以及与吊框的支撑板连接的L形支撑板,倒U形吊臂的一侧与吊框挂角处的支撑板连接;所述L形支撑板设置在倒U形吊臂的下方,且二者之间设有能让间隔分裂棒通过的缝隙。本发明提供的空中作业平台使用方便,安全,可在导线上固定而且能够轻松进行刹车,在弧垂较大的电导线上行走,能避免打滑现象。本发明能顺利进行间隔棒的更换安装及其他维