
轮式车辆自适应承载与驱动装置及其控制方法.pdf

梅雪****67


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮式车辆自适应承载与驱动装置及其控制方法.pdf
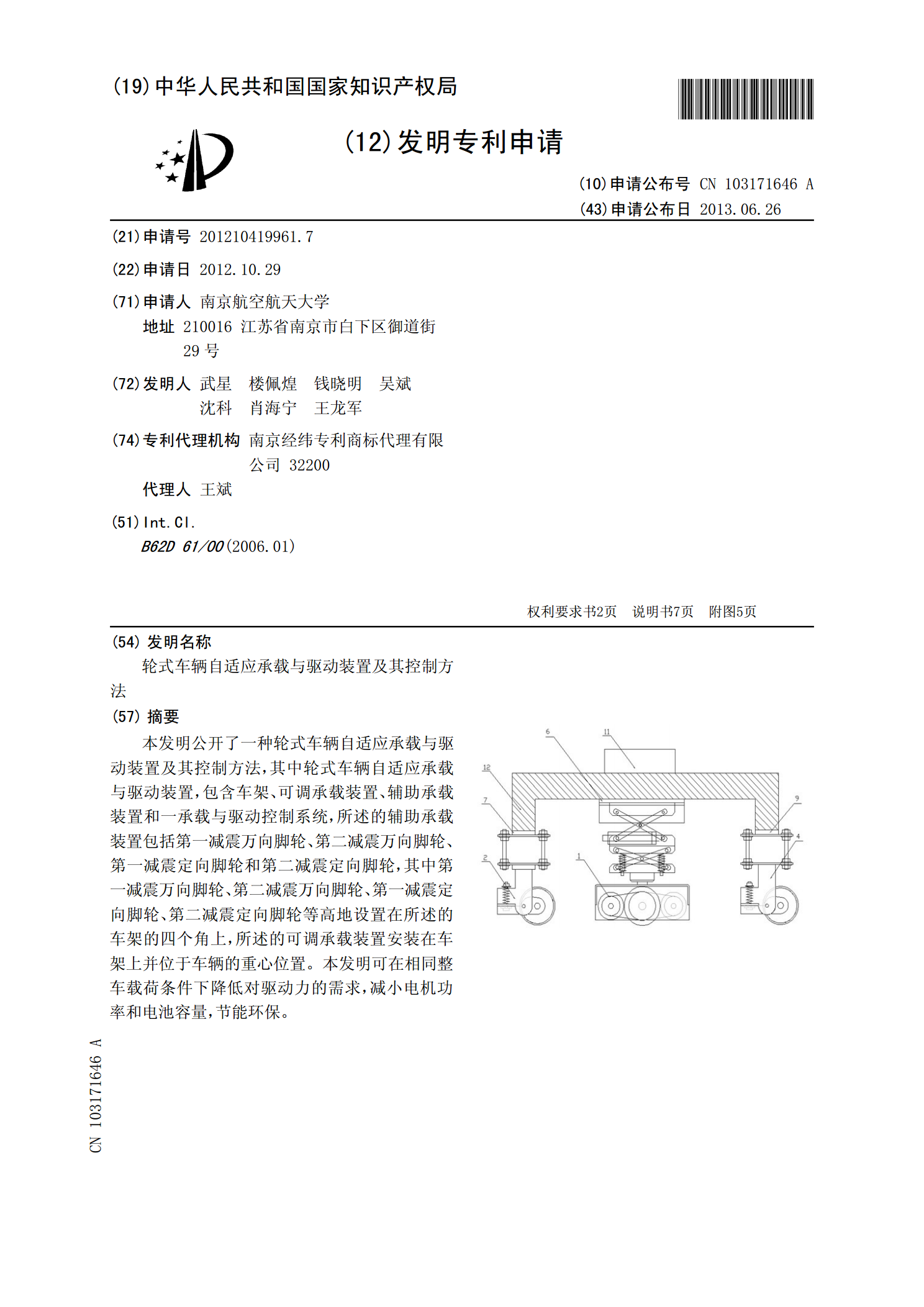
本发明公开了一种轮式车辆自适应承载与驱动装置及其控制方法,其中轮式车辆自适应承载与驱动装置,包含车架、可调承载装置、辅助承载装置和一承载与驱动控制系统,所述的辅助承载装置包括第一减震万向脚轮、第二减震万向脚轮、第一减震定向脚轮和第二减震定向脚轮,其中第一减震万向脚轮、第二减震万向脚轮、第一减震定向脚轮、第二减震定向脚轮等高地设置在所述的车架的四个角上,所述的可调承载装置安装在车架上并位于车辆的重心位置。本发明可在相同整车载荷条件下降低对驱动力的需求,减小电机功率和电池容量,节能环保。

车辆驱动装置及其控制方法.pdf
当满足用于起动发动机(50)的条件时,控制器(90)执行锁定切换控制,然后控制器(90)执行起转控制(步骤S6),在所述锁定切换控制中车轮(88)被制动装置(86)强制锁定且驻车锁定机构(200)被释放以解除对驱动轴的锁定(步骤S4,步骤S5),在所述起转控制中发动机(50)由电动发电机(MG1)起动。

车辆驱动装置的控制装置及车辆驱动装置的控制方法.pdf
本发明涉及一种用于车辆驱动装置的控制装置及控制方法。所述车辆驱动装置包括输出用于行驶的驱动力的驱动源(12)和具有多个变速档的自动变速器(16)。所述控制装置包括信号控制装置(20),所述信号控制装置在自动变速器的手动降档被执行时执行与加速器操作无关地改变所述驱动源的输出转矩的信号控制,并且基于在所述自动变速器的换档开始时涡轮转速的欠调量以学习方式改变执行下次信号控制的正时。

一种光驱动微型轮式车辆及其驱动方法.pdf
一种光驱动微型轮式车辆,包括车轴、车轮,还包括带轮、环形带,每根车轴上均固定有一个带轮及左右两个车轮,前后车轴上的两个带轮之间绕有可以弯曲变形的环形带,通过环形带上光致形变材料的弯曲变形驱动带轮旋转,实现车轴及车轮旋转。其驱动方法:将外圈为光致形变材料制成的封闭环形带紧密套在前后两个带轮上;对环形带外圈采取某方向的光照,光致形变材料被照射的部分表面收缩,发生弯曲,这部分有脱离带轮的趋势;致使环形带对带轮产生逆时针旋转的力矩,驱动该轮式车辆向左行走。本发明结构简单,尺寸很小,不再需要发动机、传动机构等一系列
车辆的驱动控制装置及车辆的控制方法.pdf
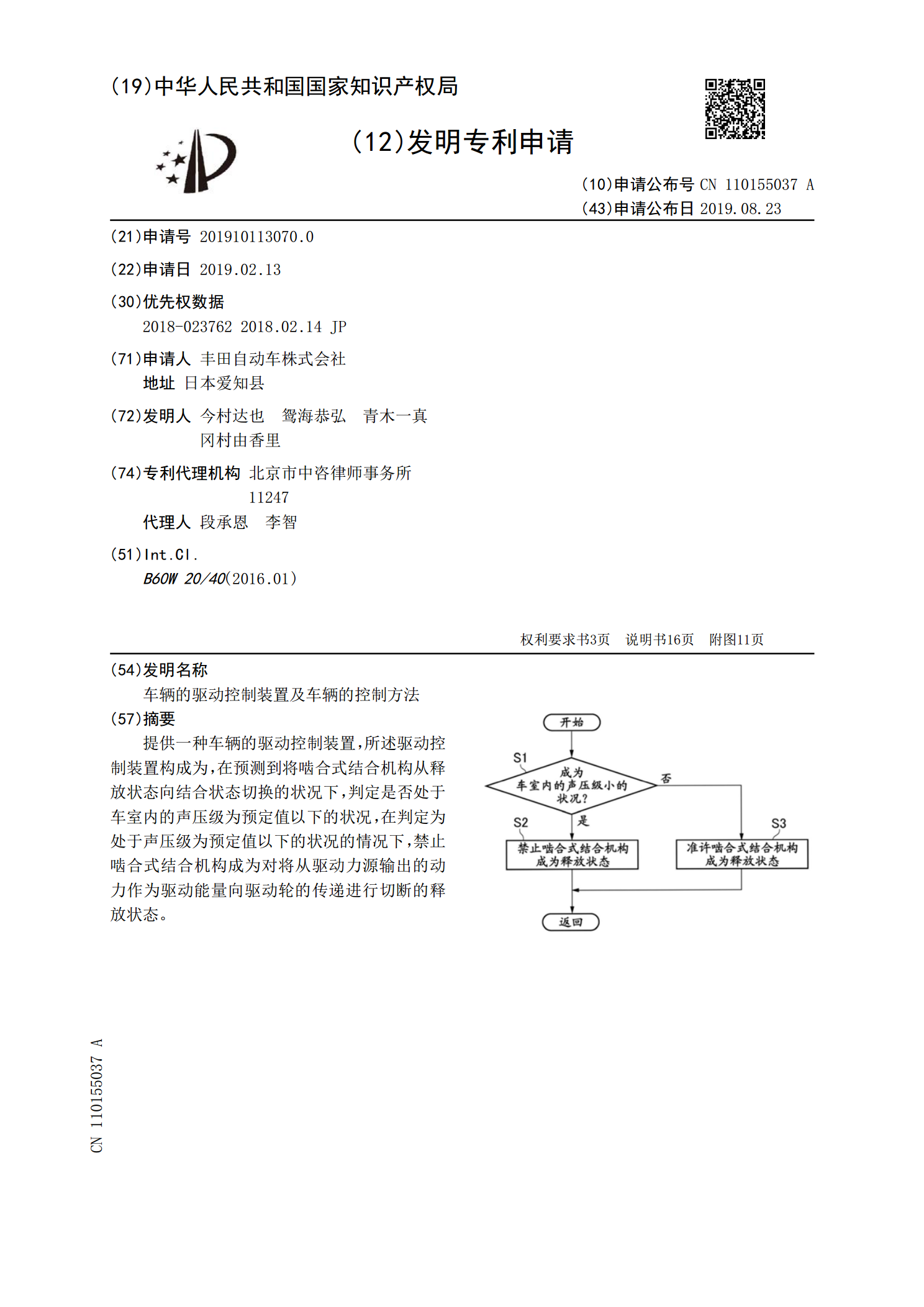
提供一种车辆的驱动控制装置,所述驱动控制装置构成为,在预测到将啮合式结合机构从释放状态向结合状态切换的状况下,判定是否处于车室内的声压级为预定值以下的状况,在判定为处于声压级为预定值以下的状况的情况下,禁止啮合式结合机构成为对将从驱动力源输出的动力作为驱动能量向驱动轮的传递进行切断的释放状态。