
一种两足移动机构.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种两足移动机构.pdf
一种两足移动机构包括:一个十字型平台(A)、一个H型平台(B)、两个含推杆的支链(D、E)、一个含推杆及齿轮(C-5)的支链(C)、一个含推杆及电机(F-4)的支链(F),?四个曲轴(1、2、3、4)。十字型平台(A)与H型平台(B)平行布置,各支链端部与平台采用万向节连接,因此该机构共有八个万向节。所述H型平台(B)设有电机(B-4),在其带动下,该机构可实现上下平台沿纵向交替行进。电机(F-4)布置垂直布置于支链(F)上,可使机构实现横向移动。各推杆内均设有电机,可使离地平台垂直升降以及绕横向或纵向转

一种新型轮足移动机构.pdf
本发明公开一种新型轮足移动机构,包括本体及若干套轮足组件,轮足组件包括:安装腿组件、通过第一转轴可转动地安装于安装腿组件上的大腿组件及通过第二转轴可转动地安装于大腿组件上的小腿组件;轮足移动机构处于轮式工作模式时,大腿组件以第一转轴为转轴转动,并锁定小腿组件与大腿组件的相对位置,小腿组件转动的中心轴与所述第一转轴重合或不重合;轮足移动机构处于足式工作模式时,大腿组件绕着第一转轴做第一角度的往返运动,小腿组件绕着第二转轴做第二角度的往返摆动,通过四套轮足组件的协调运动就能实现类似四足动物的行走状态。本发明轮

多模式步滚移动两足并联机构的研究的中期报告.docx
多模式步滚移动两足并联机构的研究的中期报告尊敬的指导老师:我在您的指导下进行了多模式步滚移动两足并联机构的研究,并在此提交中期报告。研究目标该研究的主要目标是设计一种具有多种步态模式的步滚移动两足并联机构,并探究其运动特性和适用范围。研究方法与步骤1.文献调研:通过对相关领域的文献调研,了解步滚移动两足并联机构现有研究的基础和成果,为本研究提供指导和借鉴。2.设计并建立机构模型:依据步滚移动两足并联机构的工作原理和运动方式,设计了一种可实现不同步态模式的机构模型,并使用SolidWorks绘制了机构三维模
一种两轴移动抓取机构.pdf
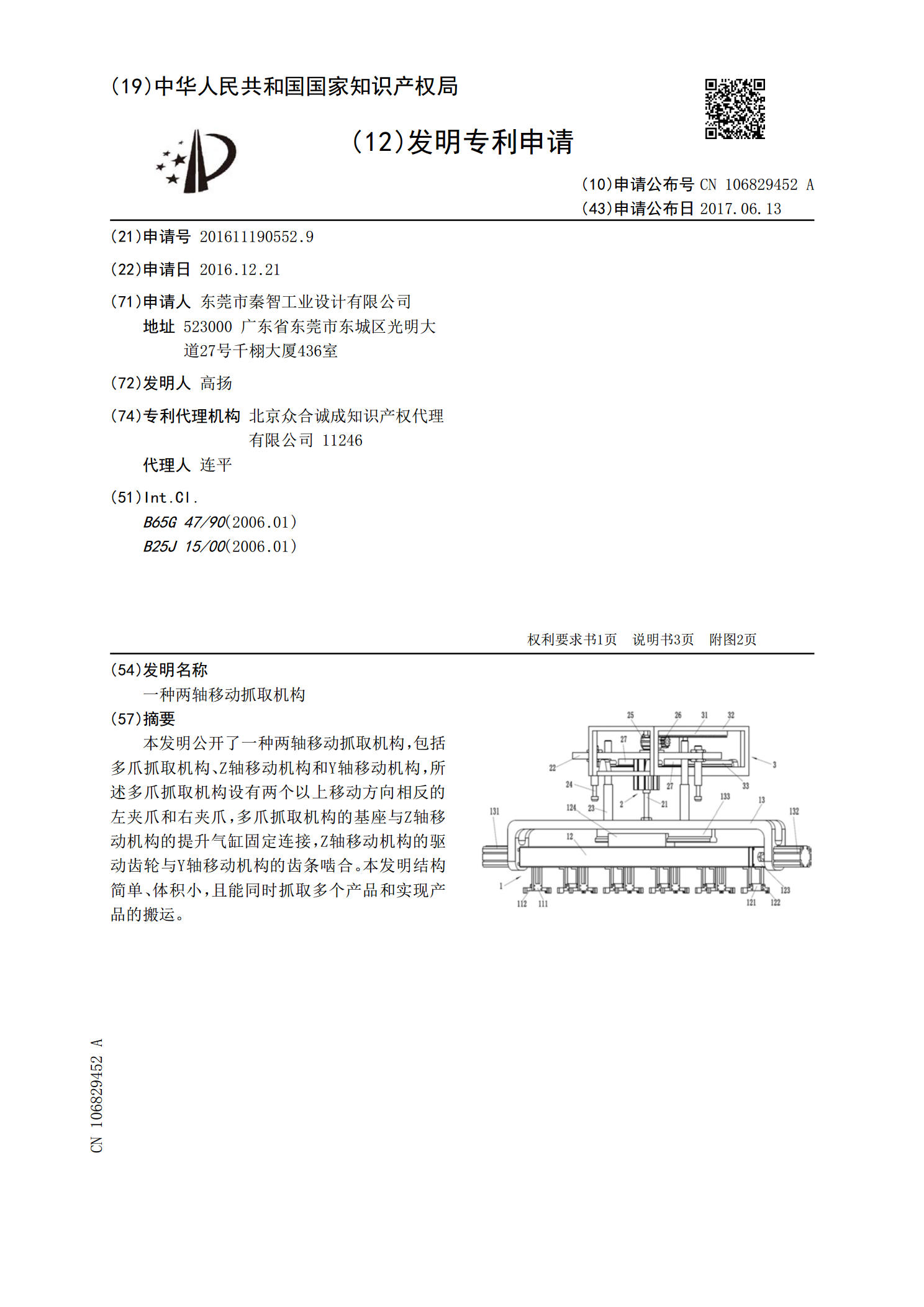
本发明公开了一种两轴移动抓取机构,包括多爪抓取机构、Z轴移动机构和Y轴移动机构,所述多爪抓取机构设有两个以上移动方向相反的左夹爪和右夹爪,多爪抓取机构的基座与Z轴移动机构的提升气缸固定连接,Z轴移动机构的驱动齿轮与Y轴移动机构的齿条啮合。本发明结构简单、体积小,且能同时抓取多个产品和实现产品的搬运。

一种基于混合驱动机构的多足移动装置.pdf
一种基于混合驱动机构的多足移动装置,由机体(1)和多个混合驱动腿结构(2)组成;所述混合驱动腿结构(2)安装于机体(1)上,所述每个混合驱动腿结构(2)包括基座(5),主驱动电机(6)、电机座(7)、联轴器(8)、曲柄转轴(9)、曲柄(10)、曲柄连杆转轴(11)、传递连杆(12)、摇杆转轴(13)、齿轮箱转轴(14)、直线驱动单元(15)、摇杆(16)、摇杆小腿转轴(17)和小腿单元(18)、连杆-丝杠螺母套筒转轴(19)、连杆小腿转轴(20)。本发明实现快速、高效的步态摆动,从而实现移动装置的高效行走