
一种两轴移动抓取机构.pdf

美丽****ka

1/7
2/7
3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种两轴移动抓取机构.pdf
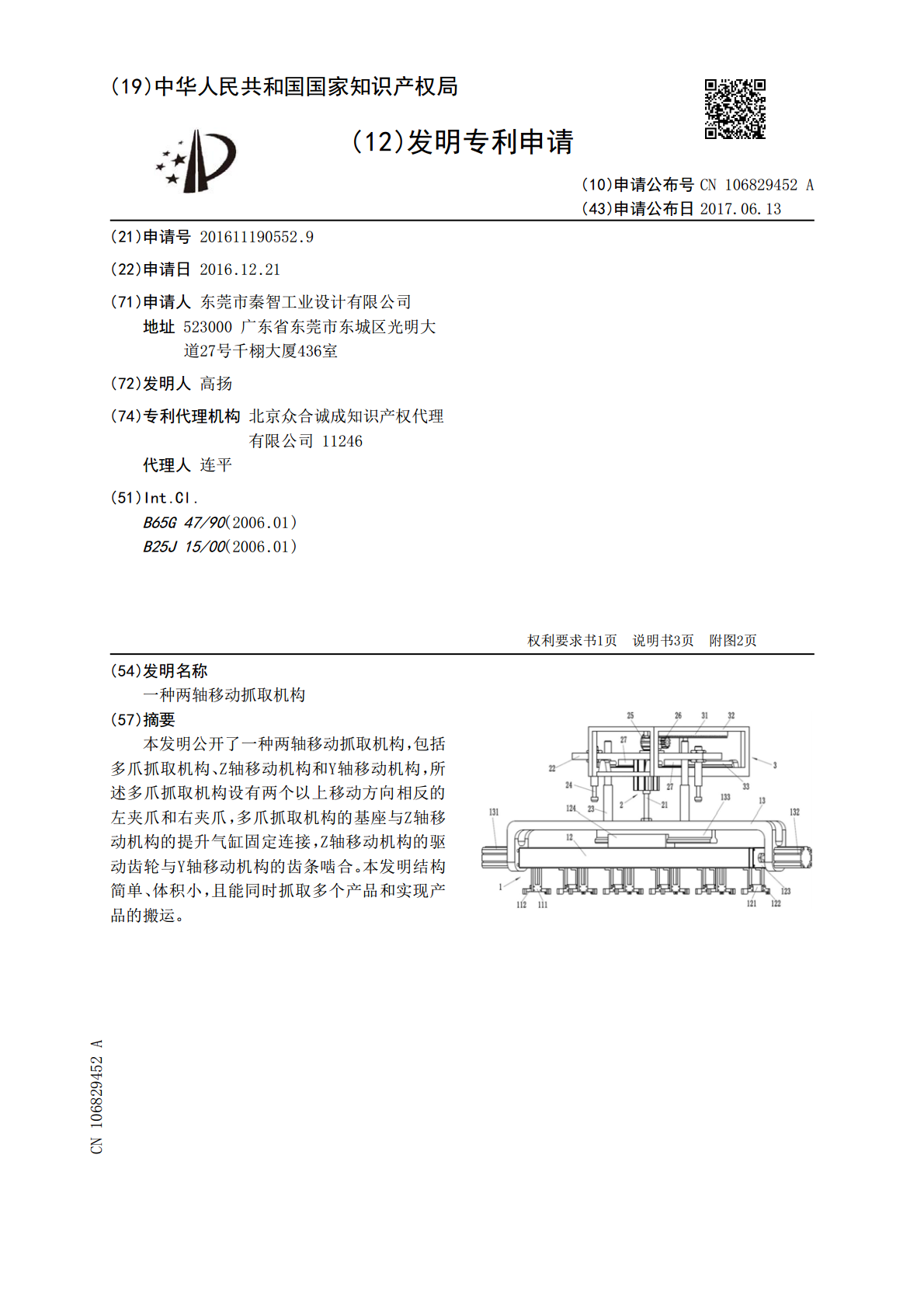
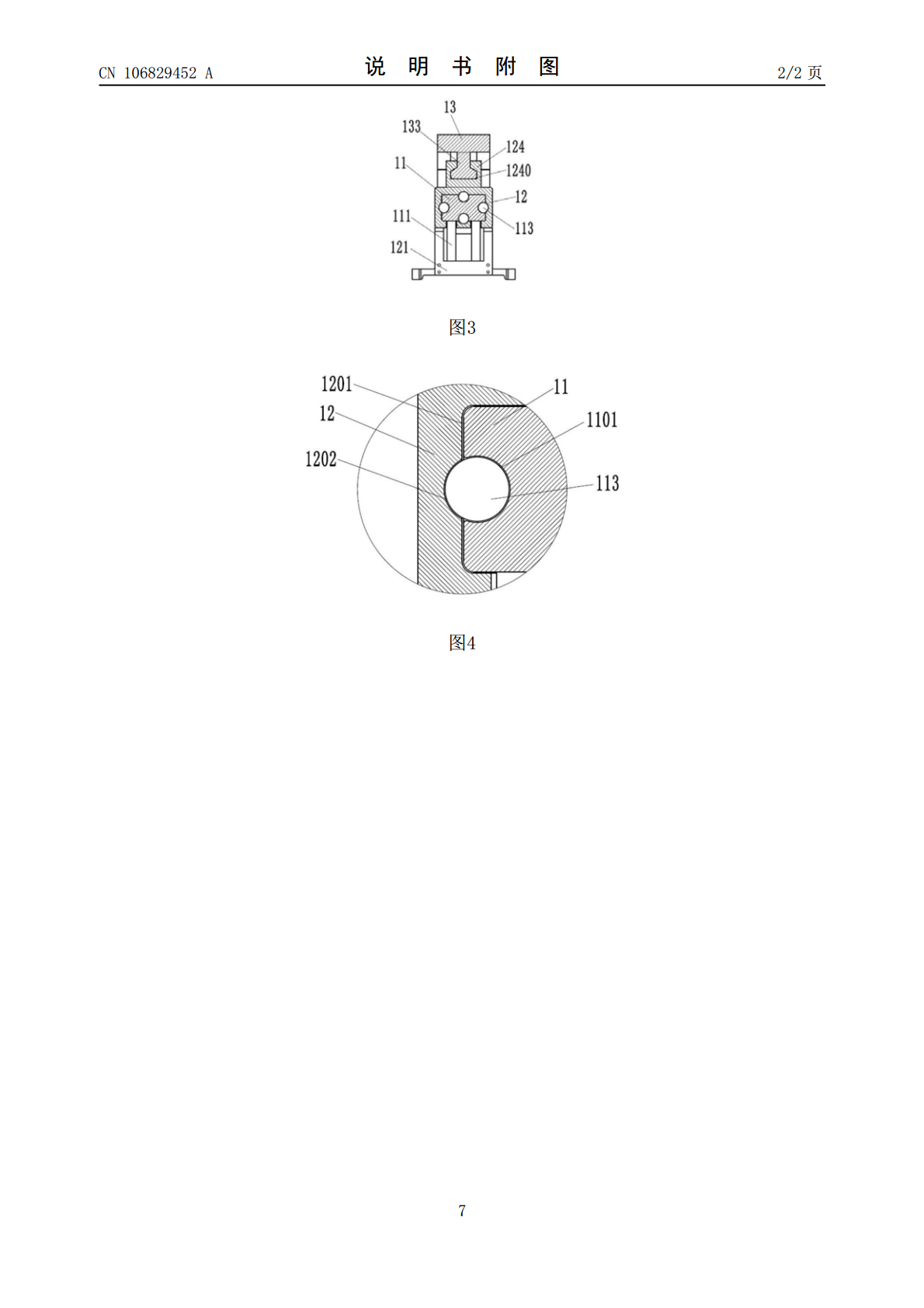
本发明公开了一种两轴移动抓取机构,包括多爪抓取机构、Z轴移动机构和Y轴移动机构,所述多爪抓取机构设有两个以上移动方向相反的左夹爪和右夹爪,多爪抓取机构的基座与Z轴移动机构的提升气缸固定连接,Z轴移动机构的驱动齿轮与Y轴移动机构的齿条啮合。本发明结构简单、体积小,且能同时抓取多个产品和实现产品的搬运。

一种布料卷筒轴中间输送抓取机构.pdf
本发明公开了一种布料卷筒轴中间输送抓取机构,包括连接支架,所述连接支架铰接在中间转动轴的两端,连接支架固定在地面上,中间转动轴上固定有两个圆形盘,多个横向连接杆的两端分别固定在对应的圆形盘上,横向连接杆上固定有抓取臂,抓取臂的端部固定有抓取块,连接支架的前部底面固定有提取支撑架,提取支撑架的两个支柱的内侧壁上固定有横向调节梁,横向调节梁的前端固定有主驱动电机,主驱动电机的输出轴通过联轴器与转动螺杆相连接,转动螺杆的两端铰接在横向调节梁中,转动螺杆中螺接有提取块,提取块的下端固定有电磁铁块;它安装在两个输送
一种短轴类零件抓取机构.pdf
本发明涉及一种短轴类零件抓取机构,包括回转气缸、爪部抓取单元以及与爪部抓取单元配合的爪部核心齿轮单元,所述爪部抓取单元包括机械夹爪Ⅰ与机械夹爪Ⅱ,所述爪部核心齿轮单元包括顶板、步进电机、顶板连接件、锥齿轮Ⅰ以及锥齿轮Ⅱ,所述机械夹爪Ⅰ与机械夹爪Ⅱ设置于顶板上,所述顶板与所述回转气缸的旋转平台配合连接,所述顶板连接件设置于顶板相对回转气缸另一侧并与顶板相互垂直设置,所述步进电机与顶板连接件配合连接,所述步进电机的输出轴与锥齿轮Ⅰ配合连接,所述锥齿轮Ⅰ通过所述步进电机的输出轴与机械夹爪Ⅰ联动配合,所述锥齿轮Ⅱ
一种圆形金属板钻孔移动抓取机构.pdf
本发明公开了一种圆形金属板钻孔移动抓取机构,包括机架,所述机架的顶板的中部具有横向通槽,机架的顶板的左侧顶面固定有上支撑架,上支撑架的上部支撑板的顶面固定有伸缩油缸,伸缩油缸的推杆穿过上支撑架并固定有钻孔支撑板,钻孔支撑板的顶面两侧固定有钻孔电机,钻孔电机的输出轴穿过钻孔支撑板并固定有钻头,钻孔支撑板的顶面固定有竖直导杆,竖直导杆插套在上支撑架的上部支撑板的底面具有的导向套中;横向螺杆插套在横向通槽中,横向螺杆的两端铰接在横向通槽的两个端面上,横向螺杆的一端固定有传动齿轮,传动齿轮处于横向通槽中;它可以一
一种空心砖块自动抓取移动机构.pdf
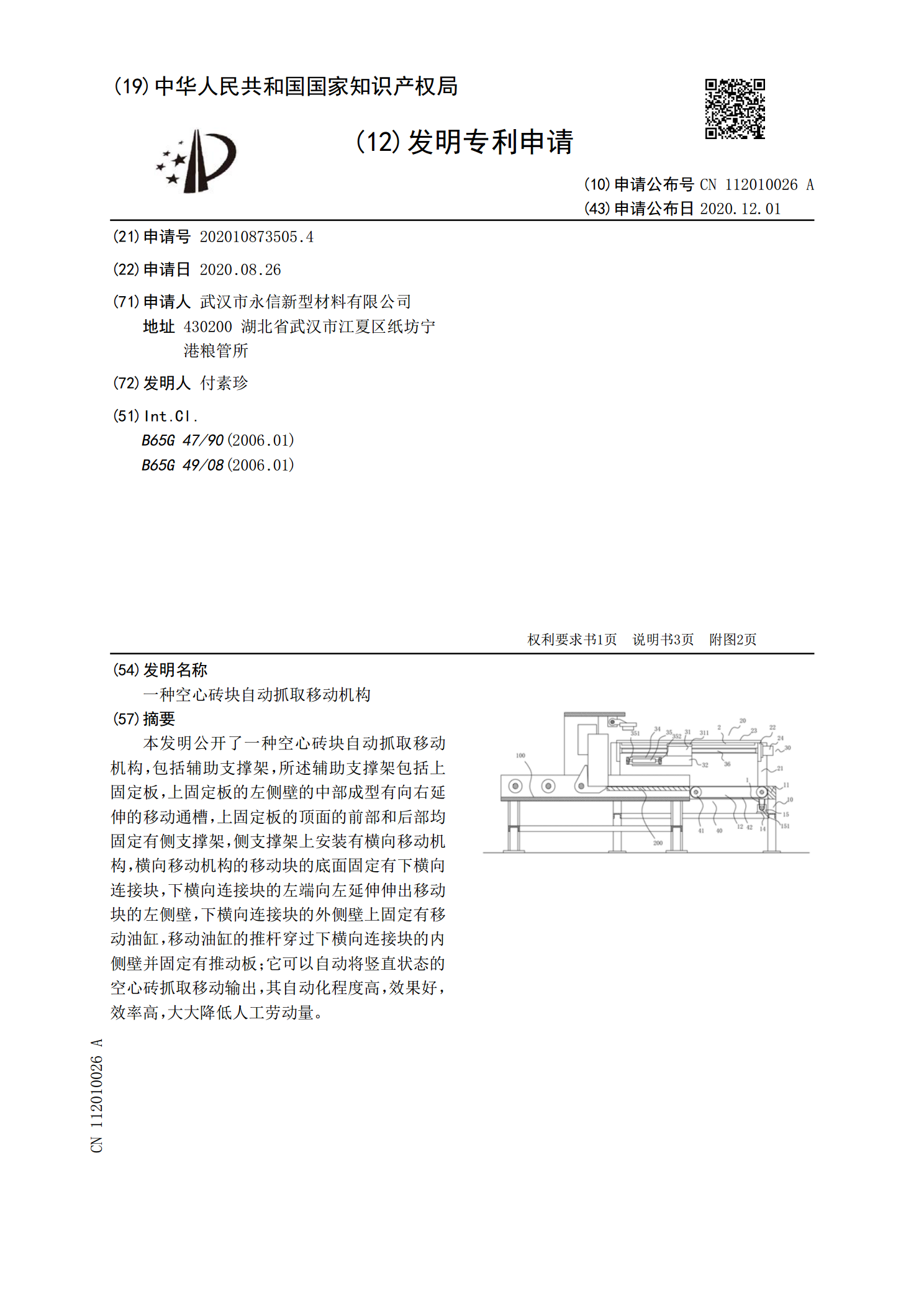
本发明公开了一种空心砖块自动抓取移动机构,包括辅助支撑架,所述辅助支撑架包括上固定板,上固定板的左侧壁的中部成型有向右延伸的移动通槽,上固定板的顶面的前部和后部均固定有侧支撑架,侧支撑架上安装有横向移动机构,横向移动机构的移动块的底面固定有下横向连接块,下横向连接块的左端向左延伸伸出移动块的左侧壁,下横向连接块的外侧壁上固定有移动油缸,移动油缸的推杆穿过下横向连接块的内侧壁并固定有推动板;它可以自动将竖直状态的空心砖抓取移动输出,其自动化程度高,效果好,效率高,大大降低人工劳动量。