
一种基于混合驱动机构的多足移动装置.pdf

小忆****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于混合驱动机构的多足移动装置.pdf
一种基于混合驱动机构的多足移动装置,由机体(1)和多个混合驱动腿结构(2)组成;所述混合驱动腿结构(2)安装于机体(1)上,所述每个混合驱动腿结构(2)包括基座(5),主驱动电机(6)、电机座(7)、联轴器(8)、曲柄转轴(9)、曲柄(10)、曲柄连杆转轴(11)、传递连杆(12)、摇杆转轴(13)、齿轮箱转轴(14)、直线驱动单元(15)、摇杆(16)、摇杆小腿转轴(17)和小腿单元(18)、连杆-丝杠螺母套筒转轴(19)、连杆小腿转轴(20)。本发明实现快速、高效的步态摆动,从而实现移动装置的高效行走

一种基于Schatz机构的多足变形机器人.pdf
一种基于Schatz机构的多足变形机器人,包括第一至第四双足模块、第一变形支撑架、第二变形支撑架、第一机身骨架、第二机身骨架、第一推杆、第二推杆、第三推杆。第一、二变形支撑架和第一、二机身骨架分别与第一至第四双足模块连接,分别位于第一至第四双足模块上下两侧。第一双足模块的底盘第一、二机身骨架固定连接,变形转轴架分别与第一、二变形支撑架和第三推杆以转动副的形式连接。
一种基于行星齿轮机构的混合动力驱动系统.pdf
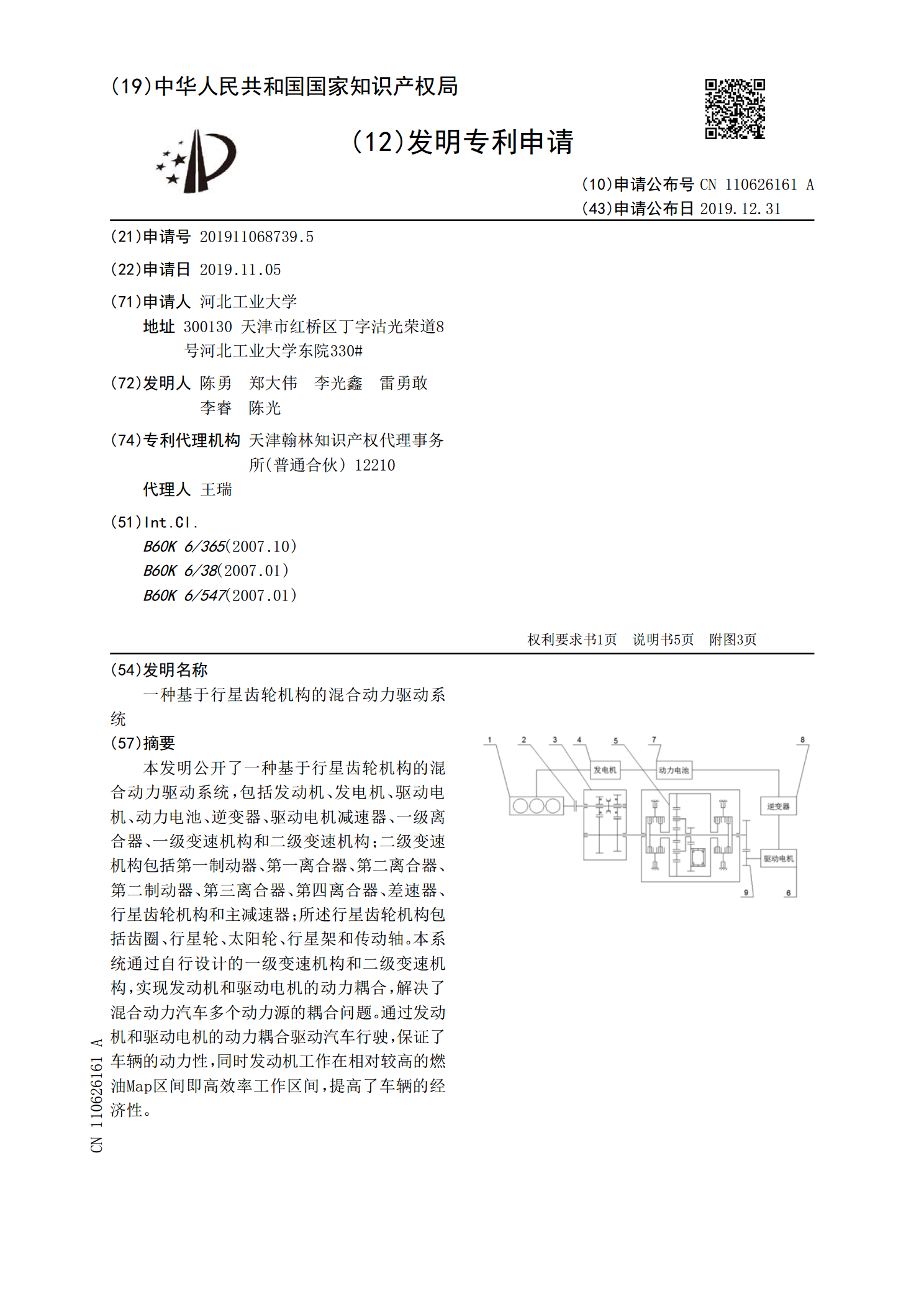
本发明公开了一种基于行星齿轮机构的混合动力驱动系统,包括发动机、发电机、驱动电机、动力电池、逆变器、驱动电机减速器、一级离合器、一级变速机构和二级变速机构;二级变速机构包括第一制动器、第一离合器、第二离合器、第二制动器、第三离合器、第四离合器、差速器、行星齿轮机构和主减速器;所述行星齿轮机构包括齿圈、行星轮、太阳轮、行星架和传动轴。本系统通过自行设计的一级变速机构和二级变速机构,实现发动机和驱动电机的动力耦合,解决了混合动力汽车多个动力源的耦合问题。通过发动机和驱动电机的动力耦合驱动汽车行驶,保证了车辆的

一种多足轮行走机构.pdf
一种多足轮行走机构,涉及一种行走装置,主要解决现有花木养护车辆行走于植被中对植被造成大面积碾压的问题。它包括驱动多角轮、调心多角轮、偏心连杆轴、调整板和驱动件,圆盘形的所述驱动多角轮、调心多角轮和调整板依次穿套在足轮轴上,且所述调整板套置在调心多角轮的中心孔中;所述驱动多角轮的中心孔活动套置在足轮轴上,并在所述驱动多角轮中心位置固定有被驱动件驱动的轴套;在所述两多角轮的周向均布有相同数量的轴孔,若干偏心连杆轴的两端分别活结在两多角轮对应的轴孔中,并在每个偏心连杆轴的外端固定有竖向的足杆。本发明有效解决了现

一种足式机器人驱动腿机构.pdf
本发明提供一种足式机器人驱动腿机构,属于足式机器人技术领域。该驱动腿机构包括腿支架、大腿骨、大腿前摆缸、大腿前拉索、大腿前滑轮、小腿前滑轮、小腿前拉索、小腿前摆缸、关节垫、小腿骨、球形足、小腿后拉索、小腿后摆缸、小腿后滑轮、大腿后滑轮、大腿后拉索、大腿后摆缸、膝关节柱、髋关节柱;腿支架与髋关节柱铰接组成髋关节,大腿骨上端与髋关节柱固连,关节垫位于大腿骨的下端并与膝关节柱铰接,大腿骨、关节垫及膝关节柱组成膝关节,小腿骨上端与膝关节柱固连,小腿骨下端与球形足固连。本发明具有结构紧凑、重量轻、能耗小、易实现快速