
一种新型轮足移动机构.pdf

春兰****89


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型轮足移动机构.pdf
本发明公开一种新型轮足移动机构,包括本体及若干套轮足组件,轮足组件包括:安装腿组件、通过第一转轴可转动地安装于安装腿组件上的大腿组件及通过第二转轴可转动地安装于大腿组件上的小腿组件;轮足移动机构处于轮式工作模式时,大腿组件以第一转轴为转轴转动,并锁定小腿组件与大腿组件的相对位置,小腿组件转动的中心轴与所述第一转轴重合或不重合;轮足移动机构处于足式工作模式时,大腿组件绕着第一转轴做第一角度的往返运动,小腿组件绕着第二转轴做第二角度的往返摆动,通过四套轮足组件的协调运动就能实现类似四足动物的行走状态。本发明轮
一种新型可全向移动的轮足机器人.pdf
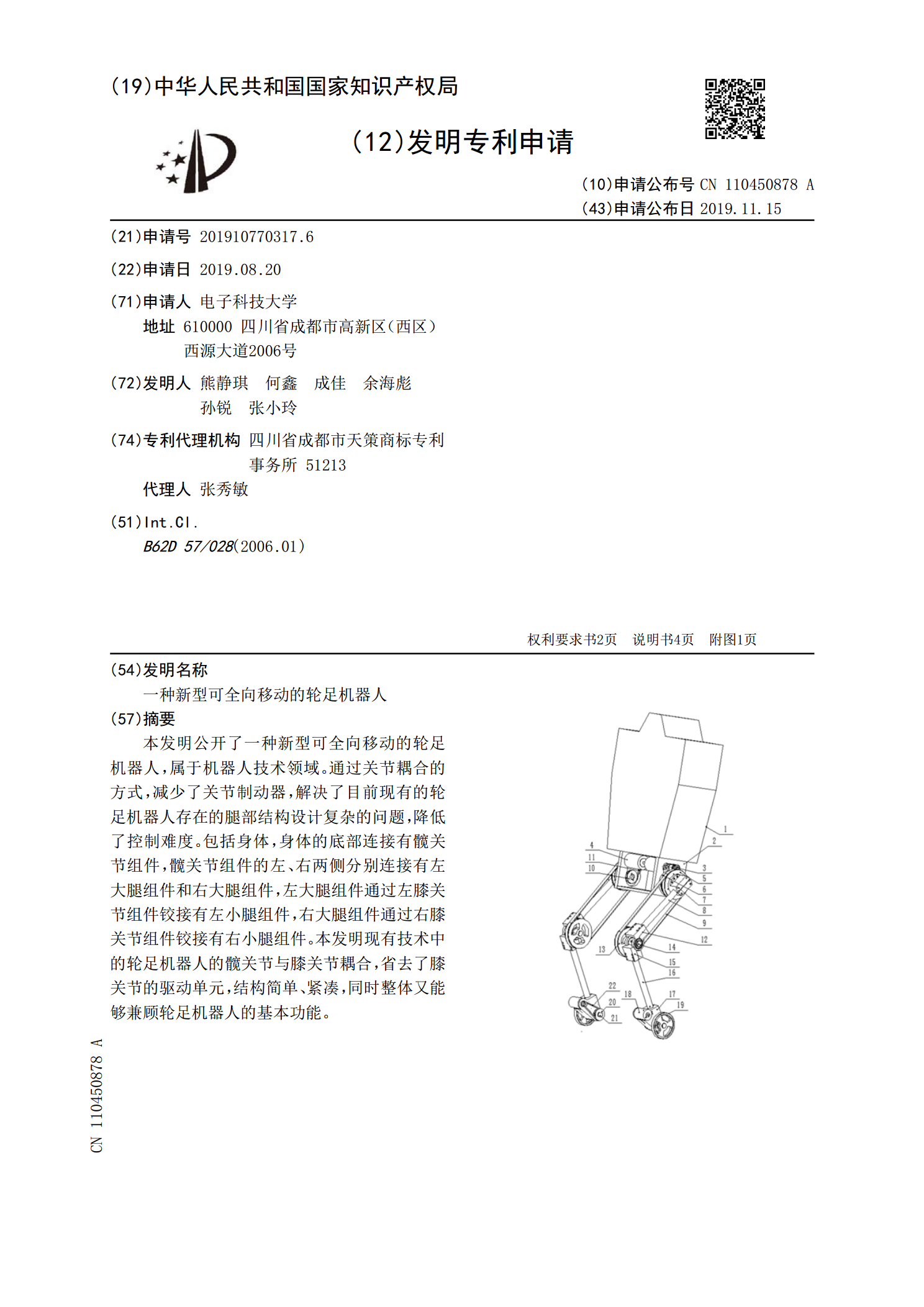
本发明公开了一种新型可全向移动的轮足机器人,属于机器人技术领域。通过关节耦合的方式,减少了关节制动器,解决了目前现有的轮足机器人存在的腿部结构设计复杂的问题,降低了控制难度。包括身体,身体的底部连接有髋关节组件,髋关节组件的左、右两侧分别连接有左大腿组件和右大腿组件,左大腿组件通过左膝关节组件铰接有左小腿组件,右大腿组件通过右膝关节组件铰接有右小腿组件。本发明现有技术中的轮足机器人的髋关节与膝关节耦合,省去了膝关节的驱动单元,结构简单、紧凑,同时整体又能够兼顾轮足机器人的基本功能。

一种两足移动机构.pdf
一种两足移动机构包括:一个十字型平台(A)、一个H型平台(B)、两个含推杆的支链(D、E)、一个含推杆及齿轮(C-5)的支链(C)、一个含推杆及电机(F-4)的支链(F),?四个曲轴(1、2、3、4)。十字型平台(A)与H型平台(B)平行布置,各支链端部与平台采用万向节连接,因此该机构共有八个万向节。所述H型平台(B)设有电机(B-4),在其带动下,该机构可实现上下平台沿纵向交替行进。电机(F-4)布置垂直布置于支链(F)上,可使机构实现横向移动。各推杆内均设有电机,可使离地平台垂直升降以及绕横向或纵向转
一种新型的移动卸料机构.pdf
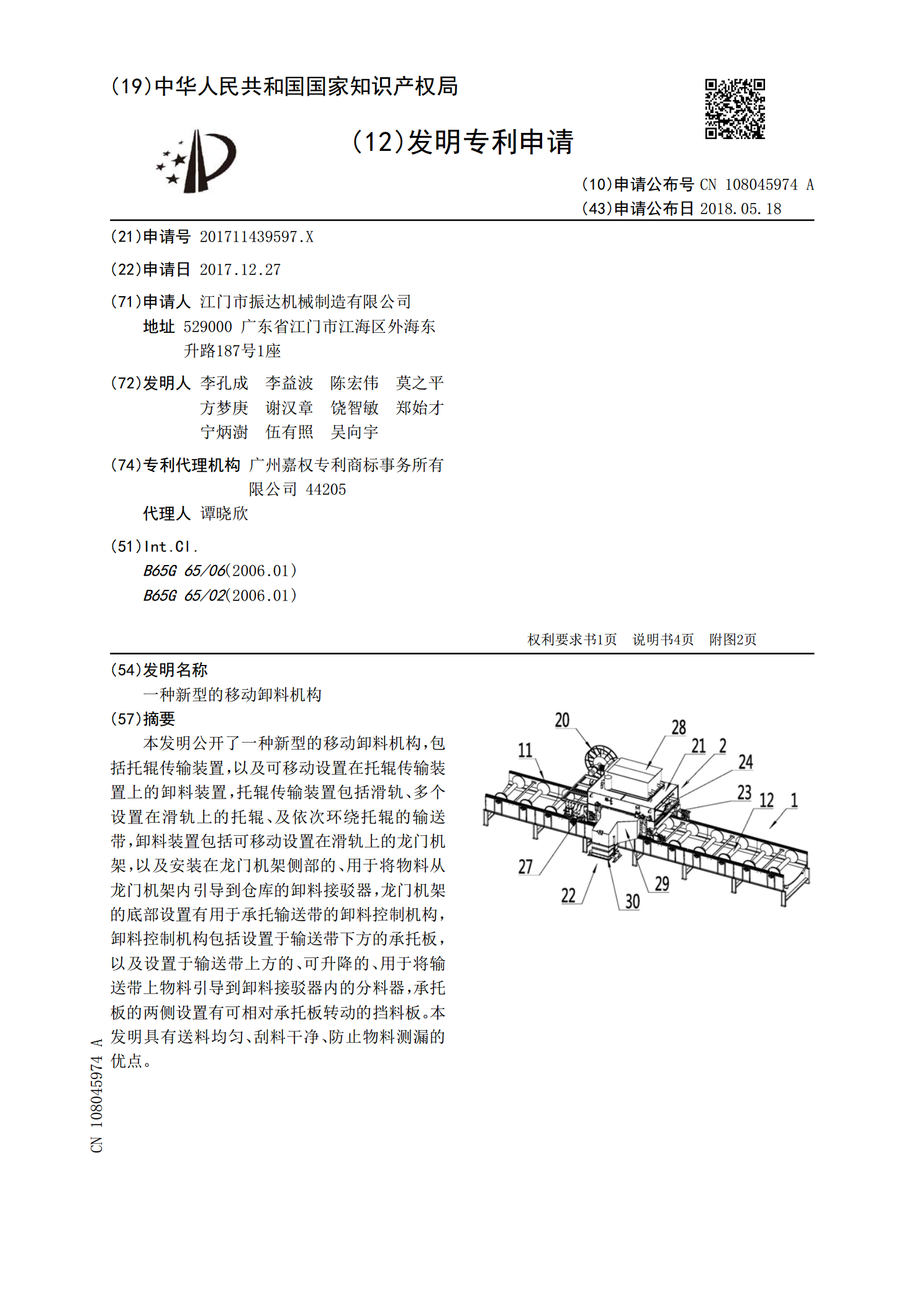
本发明公开了一种新型的移动卸料机构,包括托辊传输装置,以及可移动设置在托辊传输装置上的卸料装置,托辊传输装置包括滑轨、多个设置在滑轨上的托辊、及依次环绕托辊的输送带,卸料装置包括可移动设置在滑轨上的龙门机架,以及安装在龙门机架侧部的、用于将物料从龙门机架内引导到仓库的卸料接驳器,龙门机架的底部设置有用于承托输送带的卸料控制机构,卸料控制机构包括设置于输送带下方的承托板,以及设置于输送带上方的、可升降的、用于将输送带上物料引导到卸料接驳器内的分料器,承托板的两侧设置有可相对承托板转动的挡料板。本发明具有送料

一种新型机械人足缓冲机构.pdf
本发明公开了一种新型机械人足缓冲机构,包括活动轴,所述活动轴的底部设有相互连接的支腿柱,所述活动轴底部的四角处设有连接部,四组所述连接部的底部设有相互连接的缓冲气垫,四组所述缓冲气垫的外侧设有保护气囊,四组所述缓冲气垫与支腿柱的底部设有相互连接的连接板,所述连接板的两侧设有定位移动组件,所述连接板的底部设有足底座,所述足底座的两侧铰接有弧形铰接座。本发明通过弧形铰接座和万向轮的导向和活动扩张,并利用弹簧进行第一次活动减震,并提供装置一个支撑点和导向功能,配合受力缓冲组件进行二次缓解,有效的化解机械人足受到