
两轮自平衡车控制系统的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

两轮自平衡车控制系统的研究.docx
两轮自平衡车控制系统的研究两轮自平衡车控制系统的研究摘要:自平衡车是一种能够在两个轮子间自主平衡的交通工具。本文通过对两轮自平衡车控制系统的研究,分析了其原理和关键技术,并探讨了控制系统在实际应用中的挑战与解决方案。通过对现有研究成果的总结,提出了进一步改进和发展的建议,以推动两轮自平衡车技术的发展。关键词:两轮自平衡车、控制系统、原理、技术、挑战、解决方案1.引言两轮自平衡车作为一种新型交通工具,具有较小的体积和机动性,逐渐受到了人们的关注。其独特之处在于能够在两个轮子间实现自主平衡,根据倾斜角度实时调
两轮平衡车控制系统及两轮平衡车.pdf
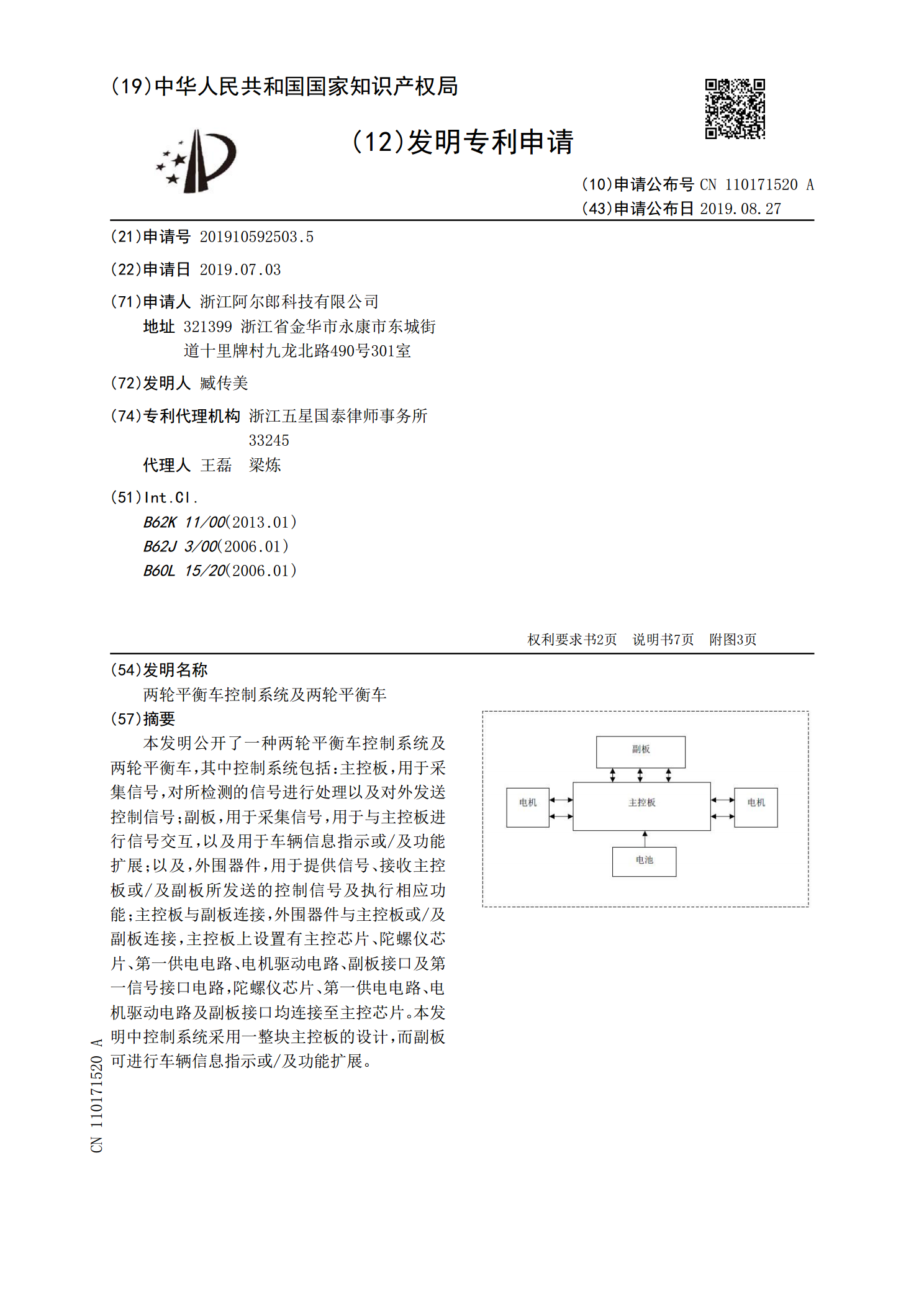
本发明公开了一种两轮平衡车控制系统及两轮平衡车,其中控制系统包括:主控板,用于采集信号,对所检测的信号进行处理以及对外发送控制信号;副板,用于采集信号,用于与主控板进行信号交互,以及用于车辆信息指示或/及功能扩展;以及,外围器件,用于提供信号、接收主控板或/及副板所发送的控制信号及执行相应功能;主控板与副板连接,外围器件与主控板或/及副板连接,主控板上设置有主控芯片、陀螺仪芯片、第一供电电路、电机驱动电路、副板接口及第一信号接口电路,陀螺仪芯片、第一供电电路、电机驱动电路及副板接口均连接至主控芯片。本发明

自平衡两轮车.pdf
本发明涉及一种自平衡两轮车,它包括车轮、踏板、踏板轴、车杆、把手、车把连接、车把连接法兰、和连接器,踏板轴由弯头、连接钢管及管法兰组成,车轮有两个,两轮左右横向布置在连接器两侧,在车轮上设有支撑人体的踏板,通过人力产生的一组力矩使自平衡车移动。虽然本自平衡小车需要人力驱动,但本发明最大的优点就是结构简单、价格低廉、绿色环保、制造方便。
两轮自平衡车.pdf
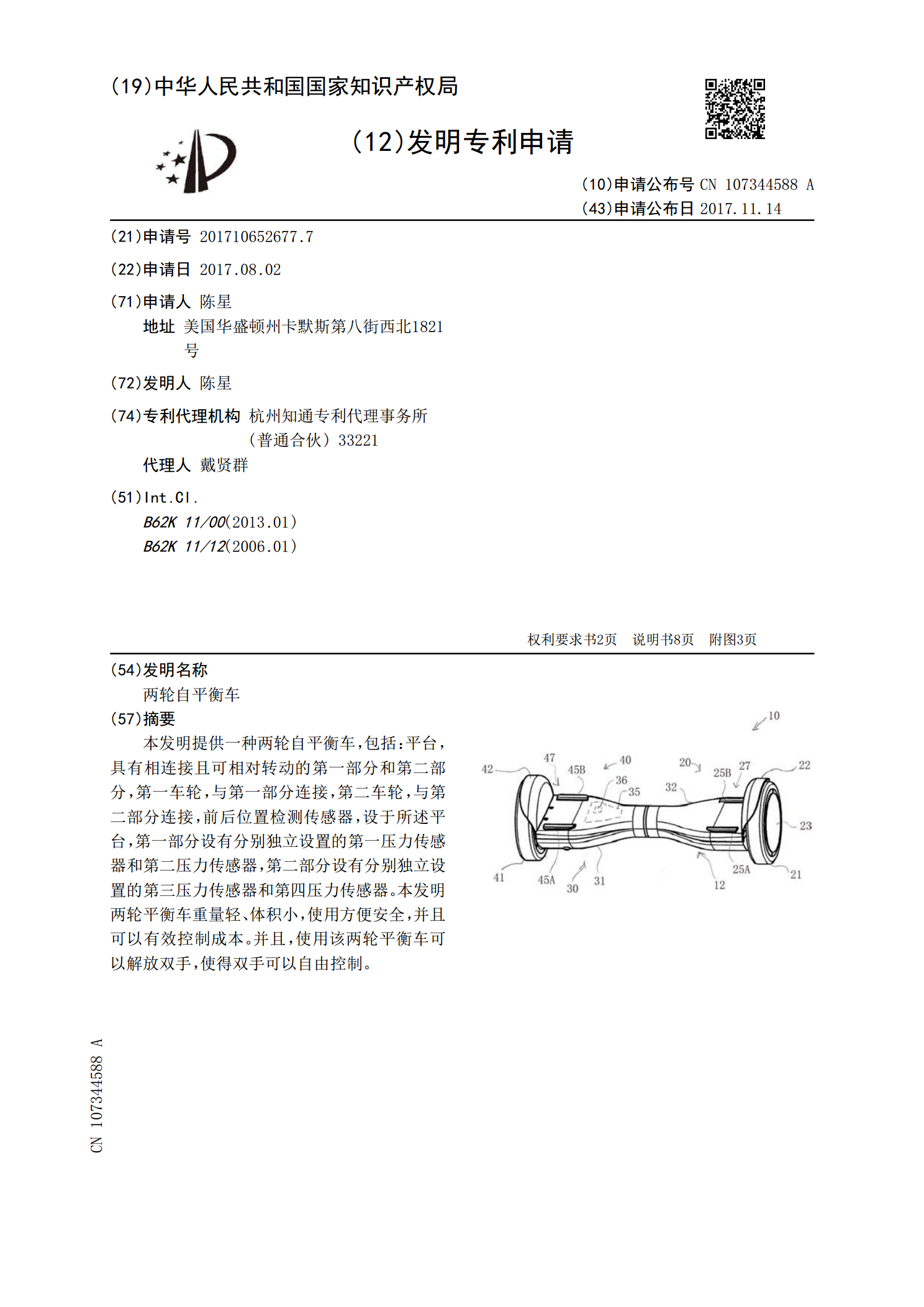
本发明提供一种两轮自平衡车,包括:平台,具有相连接且可相对转动的第一部分和第二部分,第一车轮,与第一部分连接,第二车轮,与第二部分连接,前后位置检测传感器,设于所述平台,第一部分设有分别独立设置的第一压力传感器和第二压力传感器,第二部分设有分别独立设置的第三压力传感器和第四压力传感器。本发明两轮平衡车重量轻、体积小,使用方便安全,并且可以有效控制成本。并且,使用该两轮平衡车可以解放双手,使得双手可以自由控制。

两轮自平衡车.pdf
本发明属于交通工具领域,特别涉及一种两轮自平衡车,包括车体、分别设置于车体两侧的第一驱动轮和第二驱动轮、设置于第一驱动轮外侧的第一脚踏部和设置于第二驱动轮外侧的第二脚踏部。车体内设置有联动机构,连接第一驱动轮和第二驱动轮,用于将自平衡车的位置变化量传递至检测机构。检测机构与联动机构,通过中心轴连接,根据位置变化量得到位置信号,并将位置信号传递至控制机构;控制机构,根据位置信号提取相应的控制指令,控制指令用于控制第一驱动轮和第二驱动轮进行转向作业。本发明提供的两轮自平衡车通过踏板与人体自身动作的结合来控制自