
一种水下作业机器人.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下作业机器人.pdf
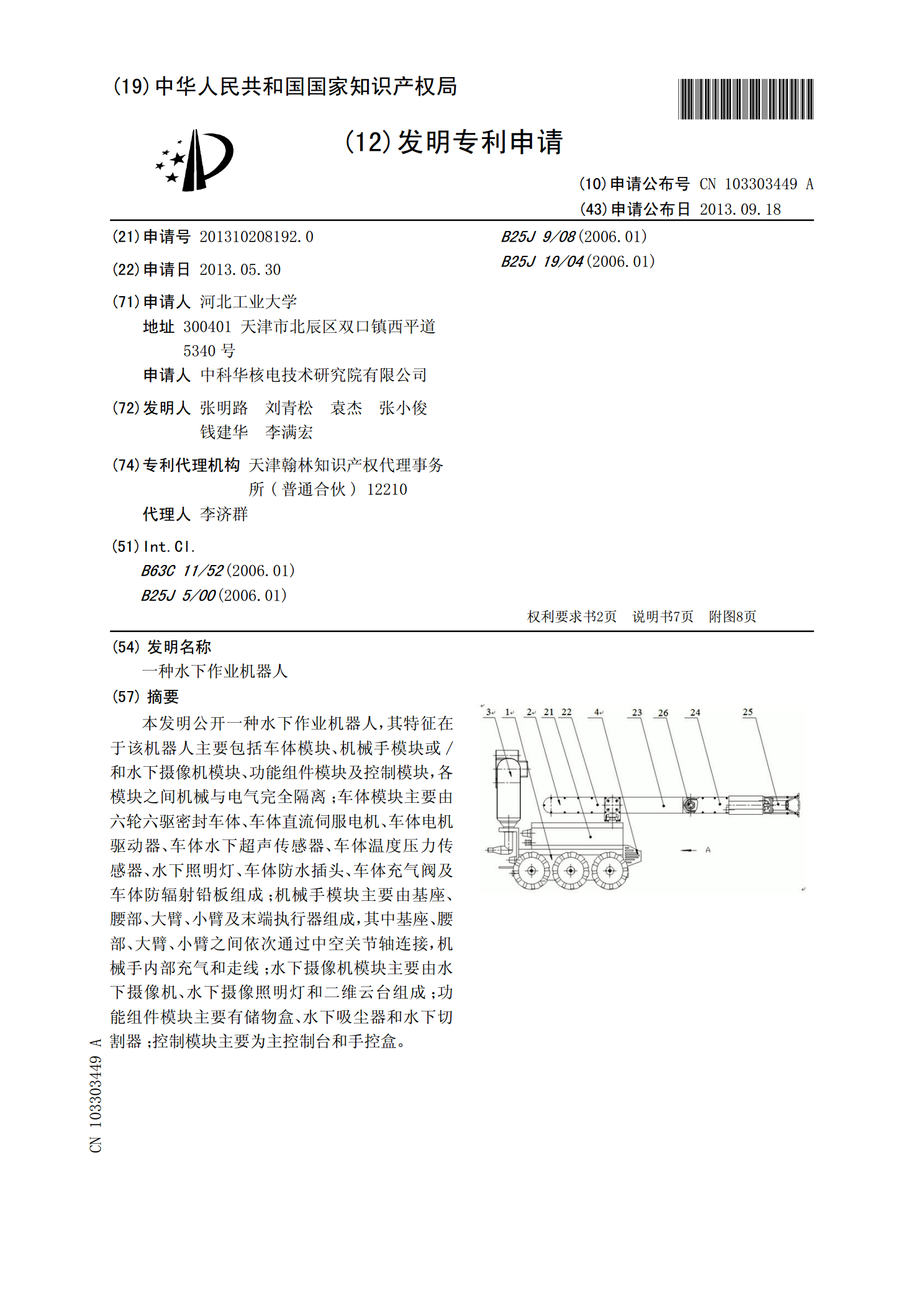
本发明公开一种水下作业机器人,其特征在于该机器人主要包括车体模块、机械手模块或/和水下摄像机模块、功能组件模块及控制模块,各模块之间机械与电气完全隔离;车体模块主要由六轮六驱密封车体、车体直流伺服电机、车体电机驱动器、车体水下超声传感器、车体温度压力传感器、水下照明灯、车体防水插头、车体充气阀及车体防辐射铅板组成;机械手模块主要由基座、腰部、大臂、小臂及末端执行器组成,其中基座、腰部、大臂、小臂之间依次通过中空关节轴连接,机械手内部充气和走线;水下摄像机模块主要由水下摄像机、水下摄像照明灯和二维云台组成;

一种水下作业打捞机器人.pdf
本发明涉及水下机器人技术领域,且公开了一种水下作业打捞机器人,包括侧板,侧板的右侧固定安装有底板,底板的顶部分别固定安装有支持板、安装座和安装环,安装座的顶部固定设有机械手组件,通过直升降推进组件、推进器组件和鱼鳍组件的相互配合,通过改变一对推进器组件的运转速度,通过液压杆改变风向板的方向,进而改变水流方向使得设备转动。本发明通过两种移动方式,使得设备在水下左右移动的方式多样化,控制过程简单,稳定性高,使用寿命长。同时,本发明通过一对夹手与转轴的螺旋涡状齿相啮合,使得设备通过调整驱动马达的转向,即可改变机
一种水下机器人及多功能水下作业装置.pdf
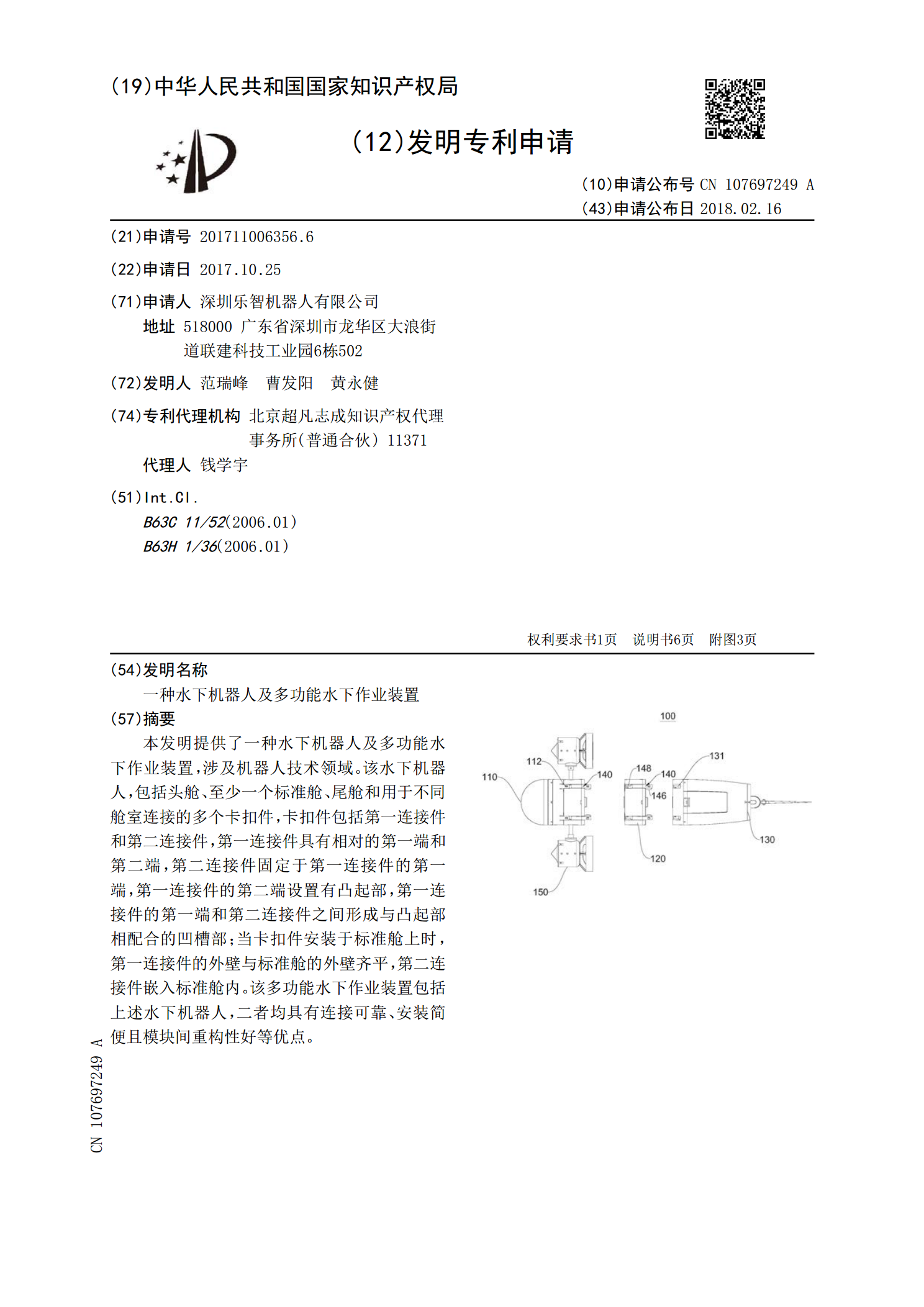
本发明提供了一种水下机器人及多功能水下作业装置,涉及机器人技术领域。该水下机器人,包括头舱、至少一个标准舱、尾舱和用于不同舱室连接的多个卡扣件,卡扣件包括第一连接件和第二连接件,第一连接件具有相对的第一端和第二端,第二连接件固定于第一连接件的第一端,第一连接件的第二端设置有凸起部,第一连接件的第一端和第二连接件之间形成与凸起部相配合的凹槽部;当卡扣件安装于标准舱上时,第一连接件的外壁与标准舱的外壁齐平,第二连接件嵌入标准舱内。该多功能水下作业装置包括上述水下机器人,二者均具有连接可靠、安装简便且模块间重构

一种水下自主作业机器人及其作业方法.pdf
本发明涉及水下作业机器人领域,提供了一种适用于多种水下作业面声学和光学检测的水下自主作业机器人及其作业方法,该水下自主作业机器人包括能源动力模块、力学结构设计模块、外形设计模块、主控模块、动力推进模块以及功能模块,其中,主控模块包括强电流电子控制舱以及弱电流电子控制舱;动力推进模块包括至少两个侧向推进器、至少两个垂直推进器以及至少一个纵向主推进器;功能模块包括多普勒测速仪、成像声呐、集成LED灯的光学摄像头、光通信MODEM、深度和高度计、前端云台和后端云台。根据本发明实施例提供的水下自主作业机器人的检测

一种多用途水下作业机器人.pdf
本发明公开了一种多功能水下作业机器人,包括机器人主架、动力系统、探测系统、清污系统、控制系统。机器人采用履带式推进方式,稳定性较轮式高,抓地力强,实现原地任意角度转向;机体采用框架式结构,较传统金属机身重量轻,构体灵活,易改进,成本低;清洗模式较传统抽水清洗,具有不换水,自动化程度高,效率高,节省功耗的特点;可用于军事勘察,水下监测;海洋输油管道检查;跨江、跨河管道检查、船体检修、船底探查、航道排障、港口作业、钻井平台水下结构检修;水下考古、水下沉船考察等。