
一种水下机器人及多功能水下作业装置.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下机器人及多功能水下作业装置.pdf
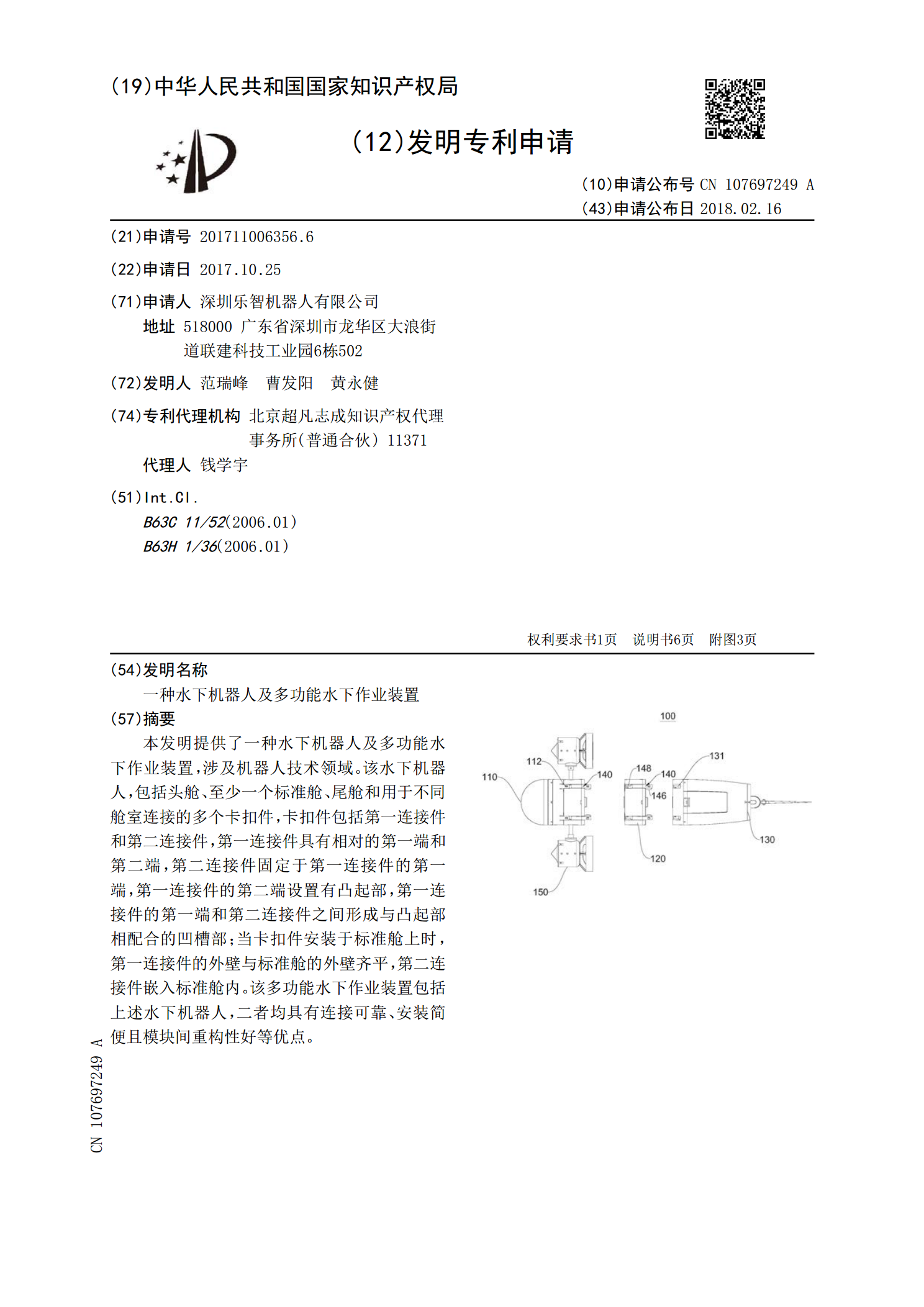
本发明提供了一种水下机器人及多功能水下作业装置,涉及机器人技术领域。该水下机器人,包括头舱、至少一个标准舱、尾舱和用于不同舱室连接的多个卡扣件,卡扣件包括第一连接件和第二连接件,第一连接件具有相对的第一端和第二端,第二连接件固定于第一连接件的第一端,第一连接件的第二端设置有凸起部,第一连接件的第一端和第二连接件之间形成与凸起部相配合的凹槽部;当卡扣件安装于标准舱上时,第一连接件的外壁与标准舱的外壁齐平,第二连接件嵌入标准舱内。该多功能水下作业装置包括上述水下机器人,二者均具有连接可靠、安装简便且模块间重构
一种多功能水下垃圾打捞机器人.pdf
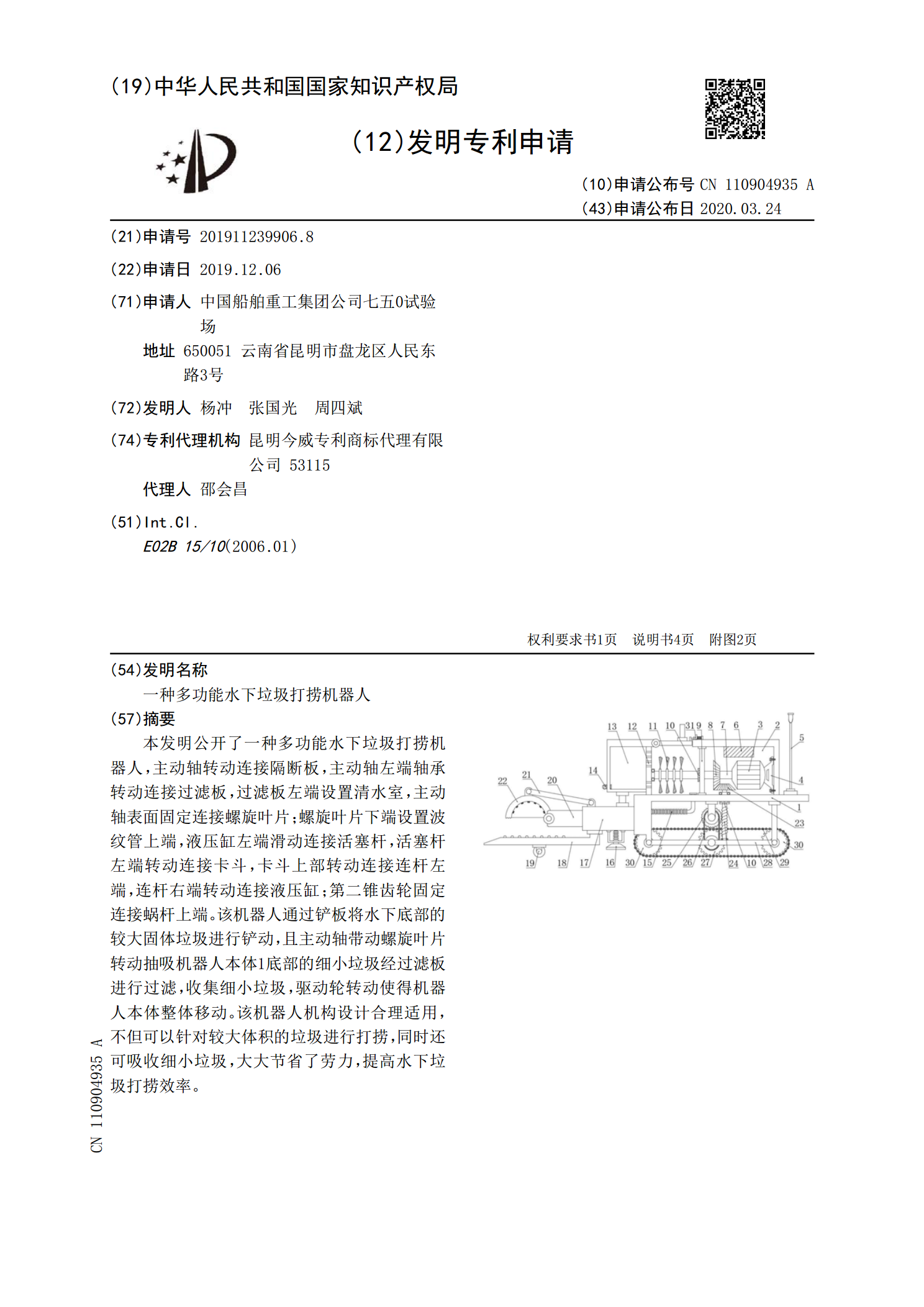
本发明公开了一种多功能水下垃圾打捞机器人,主动轴转动连接隔断板,主动轴左端轴承转动连接过滤板,过滤板左端设置清水室,主动轴表面固定连接螺旋叶片;螺旋叶片下端设置波纹管上端,液压缸左端滑动连接活塞杆,活塞杆左端转动连接卡斗,卡斗上部转动连接连杆左端,连杆右端转动连接液压缸;第二锥齿轮固定连接蜗杆上端。该机器人通过铲板将水下底部的较大固体垃圾进行铲动,且主动轴带动螺旋叶片转动抽吸机器人本体1底部的细小垃圾经过滤板进行过滤,收集细小垃圾,驱动轮转动使得机器人本体整体移动。该机器人机构设计合理适用,不但可以针对较
水下作业装置.pdf
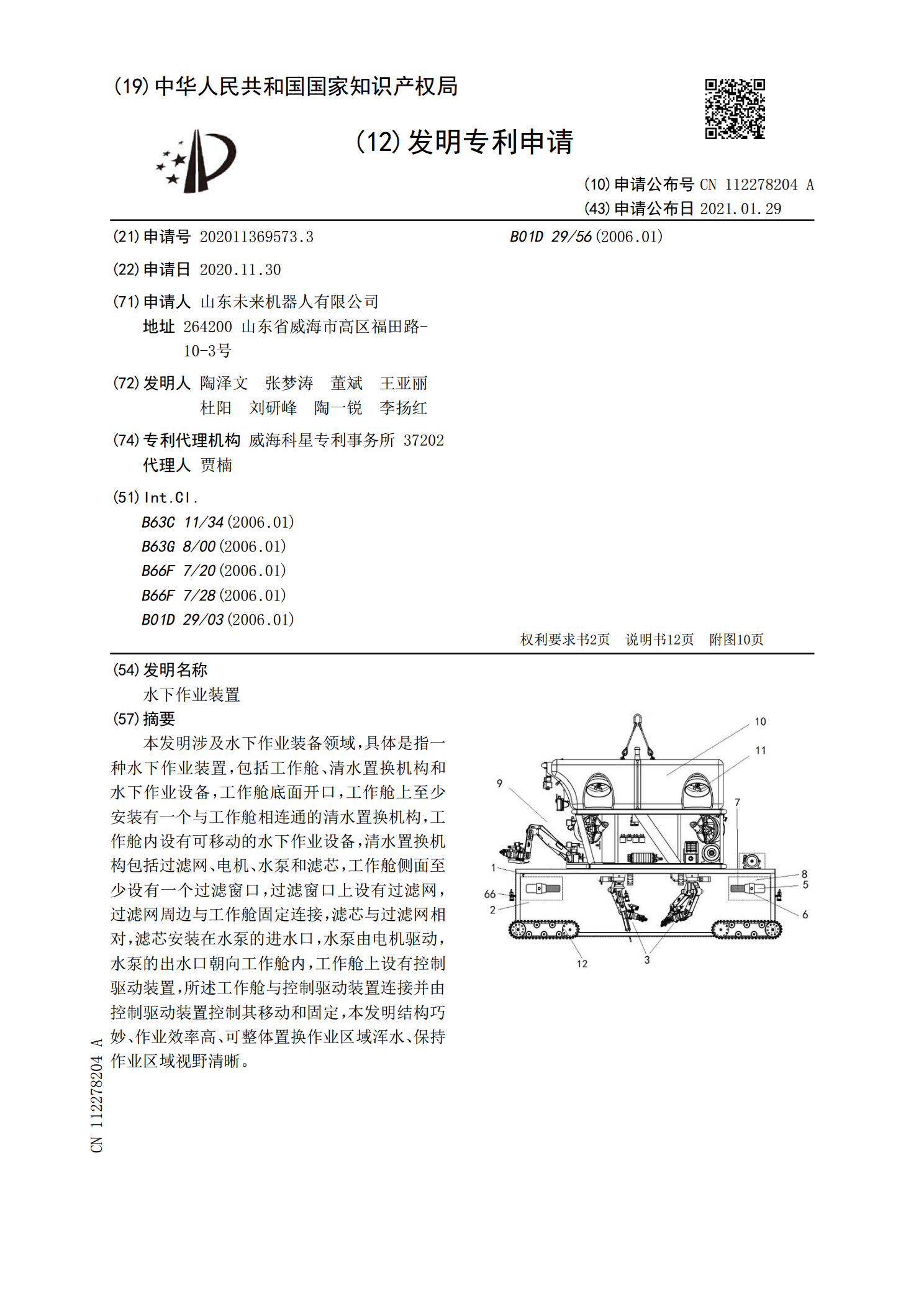
本发明涉及水下作业装备领域,具体是指一种水下作业装置,包括工作舱、清水置换机构和水下作业设备,工作舱底面开口,工作舱上至少安装有一个与工作舱相连通的清水置换机构,工作舱内设有可移动的水下作业设备,清水置换机构包括过滤网、电机、水泵和滤芯,工作舱侧面至少设有一个过滤窗口,过滤窗口上设有过滤网,过滤网周边与工作舱固定连接,滤芯与过滤网相对,滤芯安装在水泵的进水口,水泵由电机驱动,水泵的出水口朝向工作舱内,工作舱上设有控制驱动装置,所述工作舱与控制驱动装置连接并由控制驱动装置控制其移动和固定,本发明结构巧妙、作
一种水下作业机器人.pdf
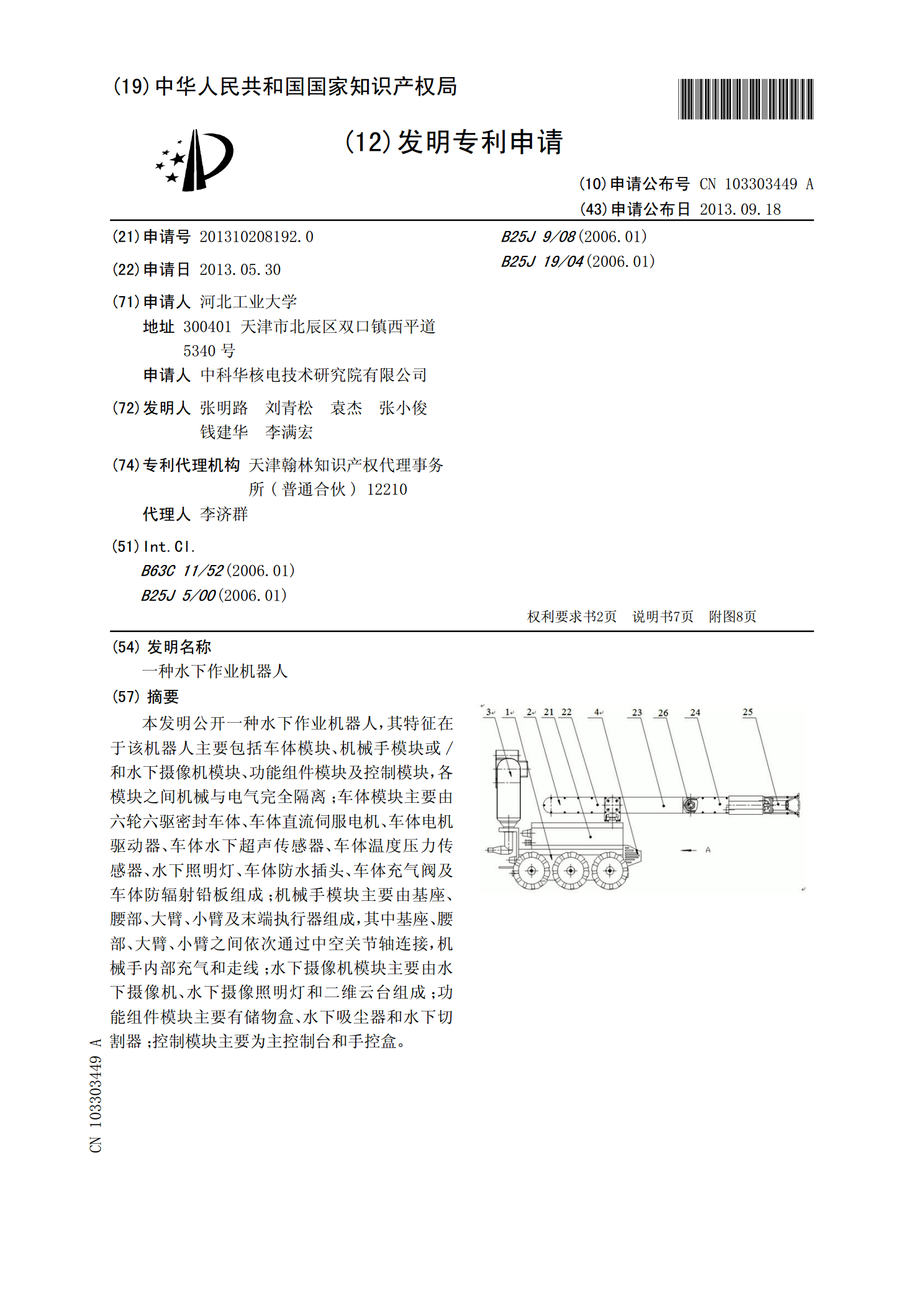
本发明公开一种水下作业机器人,其特征在于该机器人主要包括车体模块、机械手模块或/和水下摄像机模块、功能组件模块及控制模块,各模块之间机械与电气完全隔离;车体模块主要由六轮六驱密封车体、车体直流伺服电机、车体电机驱动器、车体水下超声传感器、车体温度压力传感器、水下照明灯、车体防水插头、车体充气阀及车体防辐射铅板组成;机械手模块主要由基座、腰部、大臂、小臂及末端执行器组成,其中基座、腰部、大臂、小臂之间依次通过中空关节轴连接,机械手内部充气和走线;水下摄像机模块主要由水下摄像机、水下摄像照明灯和二维云台组成;

一种作业型水下机器人重心调节装置.pdf
本发明提供一种作业型水下机器人重心调节装置,涉及水下机器人应用领域,旨在为水下机器人系统提供一种可靠的有效的重心调节装置,以平衡水下机器人系统作业时因机械手展开而产生的倾覆力矩或调节水下机器人的运动姿态,通过步进电机经一级锥齿轮传动,利用丝杠螺母传动原理调节重块的位置,位置检测传感器随重块一同运动,可以实时检测重块在密封筒体内的位置。本发明充分利用了水下机器人本体内部的有效空间,可以用于控制水下机器人的作业平衡与运动姿态,实现水下机器人的俯仰姿态控制或横滚姿态控制,且具有体积小,结构紧凑、可靠,调节精度高