
一种水下自主作业机器人及其作业方法.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水下自主作业机器人及其作业方法.pdf
本发明涉及水下作业机器人领域,提供了一种适用于多种水下作业面声学和光学检测的水下自主作业机器人及其作业方法,该水下自主作业机器人包括能源动力模块、力学结构设计模块、外形设计模块、主控模块、动力推进模块以及功能模块,其中,主控模块包括强电流电子控制舱以及弱电流电子控制舱;动力推进模块包括至少两个侧向推进器、至少两个垂直推进器以及至少一个纵向主推进器;功能模块包括多普勒测速仪、成像声呐、集成LED灯的光学摄像头、光通信MODEM、深度和高度计、前端云台和后端云台。根据本发明实施例提供的水下自主作业机器人的检测

海洋管道水下作业装置及其作业方法.pdf
海洋管道水下切割作业装置,包括主框架,主框架上连接有钢丝绳,所述主框架的底部安装有底座,主框架的尾部安装有水平推进螺旋桨,主框架的的两侧安装有垂直升降螺旋桨,特征在于,所述主框架内的下方通过连接杆连接有平台板,所述平台板的底面安装有导轨,对称布设的夹紧架的顶部套在导轨内,夹紧架通过安装在平台板的底面的液压缸一控制在导轨内运动形成夹紧圈;所述主框架的两侧均固定有液压缸二和液压缸三穿过夹紧架,其中:液压缸二的顶端安装有万向轮,液压缸三上安装有橡胶垫;本发明的有益效果为:本发明通过合理的结构设计,可以通过控制自

海洋管道水下作业装置及其作业方法.pdf
海洋管道水下切割作业装置,包括主框架,主框架上连接有钢丝绳,所述主框架的底部安装有底座,主框架的尾部安装有水平推进螺旋桨,主框架的的两侧安装有垂直升降螺旋桨,特征在于,所述主框架内的下方通过连接杆连接有平台板,所述平台板的底面安装有导轨,对称布设的夹紧架的顶部套在导轨内,夹紧架通过安装在平台板的底面的液压缸一控制在导轨内运动形成夹紧圈;所述主框架的两侧均固定有液压缸二和液压缸三穿过夹紧架,其中:液压缸二的顶端安装有万向轮,液压缸三上安装有橡胶垫;本发明的有益效果为:本发明通过合理的结构设计,可以通过控制自
一种水下作业机器人.pdf
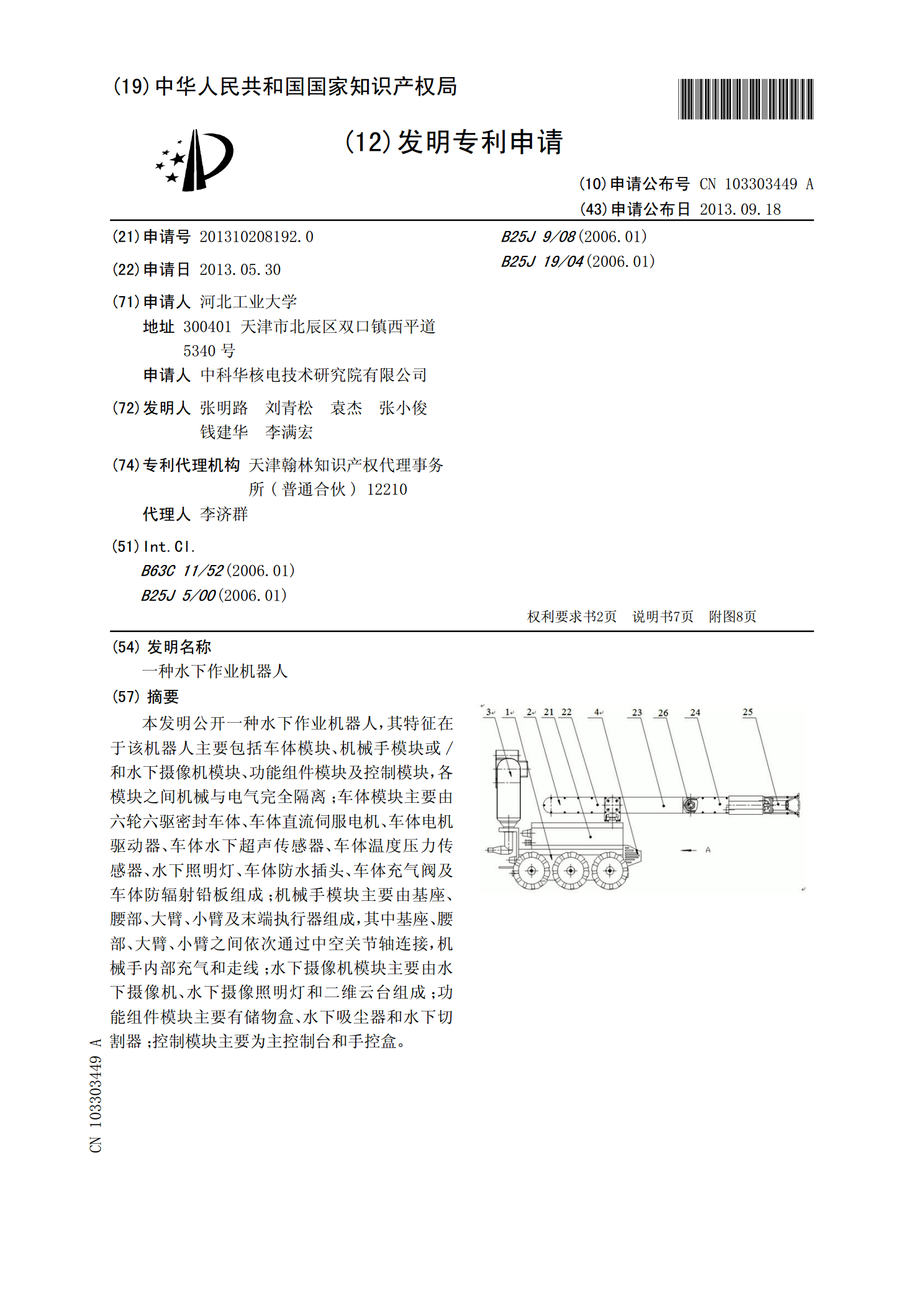
本发明公开一种水下作业机器人,其特征在于该机器人主要包括车体模块、机械手模块或/和水下摄像机模块、功能组件模块及控制模块,各模块之间机械与电气完全隔离;车体模块主要由六轮六驱密封车体、车体直流伺服电机、车体电机驱动器、车体水下超声传感器、车体温度压力传感器、水下照明灯、车体防水插头、车体充气阀及车体防辐射铅板组成;机械手模块主要由基座、腰部、大臂、小臂及末端执行器组成,其中基座、腰部、大臂、小臂之间依次通过中空关节轴连接,机械手内部充气和走线;水下摄像机模块主要由水下摄像机、水下摄像照明灯和二维云台组成;

作业型水下自主机器人系统开发及其姿态控制研究.docx
作业型水下自主机器人系统开发及其姿态控制研究作业型水下自主机器人系统开发及其姿态控制研究摘要:水下自主机器人在海洋工程、海底考古、海洋探测等领域具有广阔的应用前景。本文主要研究了作业型水下自主机器人的系统开发及其姿态控制技术。通过对机器人系统开发中的硬件设计、软件开发以及传感器选择等方面进行了详细的分析和研究,设计并开发了一套适用于作业型水下自主机器人的系统。同时,针对水下机器人姿态控制的问题,提出了一种基于PID控制和传感器反馈的姿态控制方法,并进行了仿真验证。实验结果表明,所提出的姿态控制方法具有较好