
具有自锁功能的机器人关节模块及机器人.pdf

雨巷****珺琦


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有自锁功能的机器人关节模块及机器人.pdf
本发明公布一种具有自锁功能的模块化关节机器人。机器人关节中采用蜗轮蜗杆的传动方式,机构可实现反向自锁功能。与传统方法相比,本发明具有的显著优点包括传动比大、承载能力强、传动平稳、结构紧凑,不需额外抱闸装置、成本降低;由于采用了模块化设计,系统的柔性、可扩展性、可交换性较高。本发明适合需要动静态位姿保持或者对定位精度、可靠性、安全性要求较高的场合。
一种具有自锁功能的机器人机械手爪.pdf
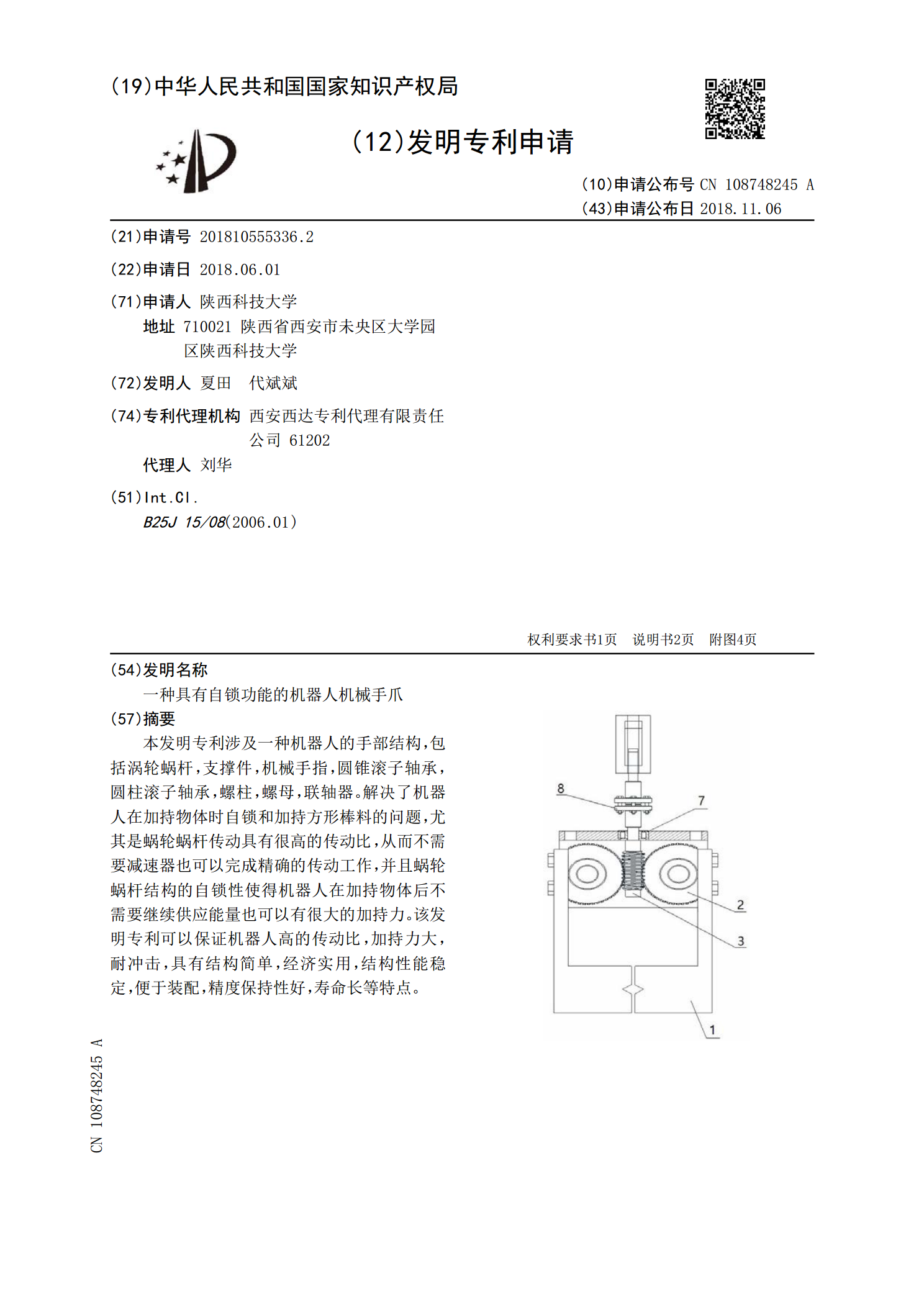
本发明专利涉及一种机器人的手部结构,包括涡轮蜗杆,支撑件,机械手指,圆锥滚子轴承,圆柱滚子轴承,螺柱,螺母,联轴器。解决了机器人在加持物体时自锁和加持方形棒料的问题,尤其是蜗轮蜗杆传动具有很高的传动比,从而不需要减速器也可以完成精确的传动工作,并且蜗轮蜗杆结构的自锁性使得机器人在加持物体后不需要继续供应能量也可以有很大的加持力。该发明专利可以保证机器人高的传动比,加持力大,耐冲击,具有结构简单,经济实用,结构性能稳定,便于装配,精度保持性好,寿命长等特点。
机器人大扭力可自锁腰关节.pdf
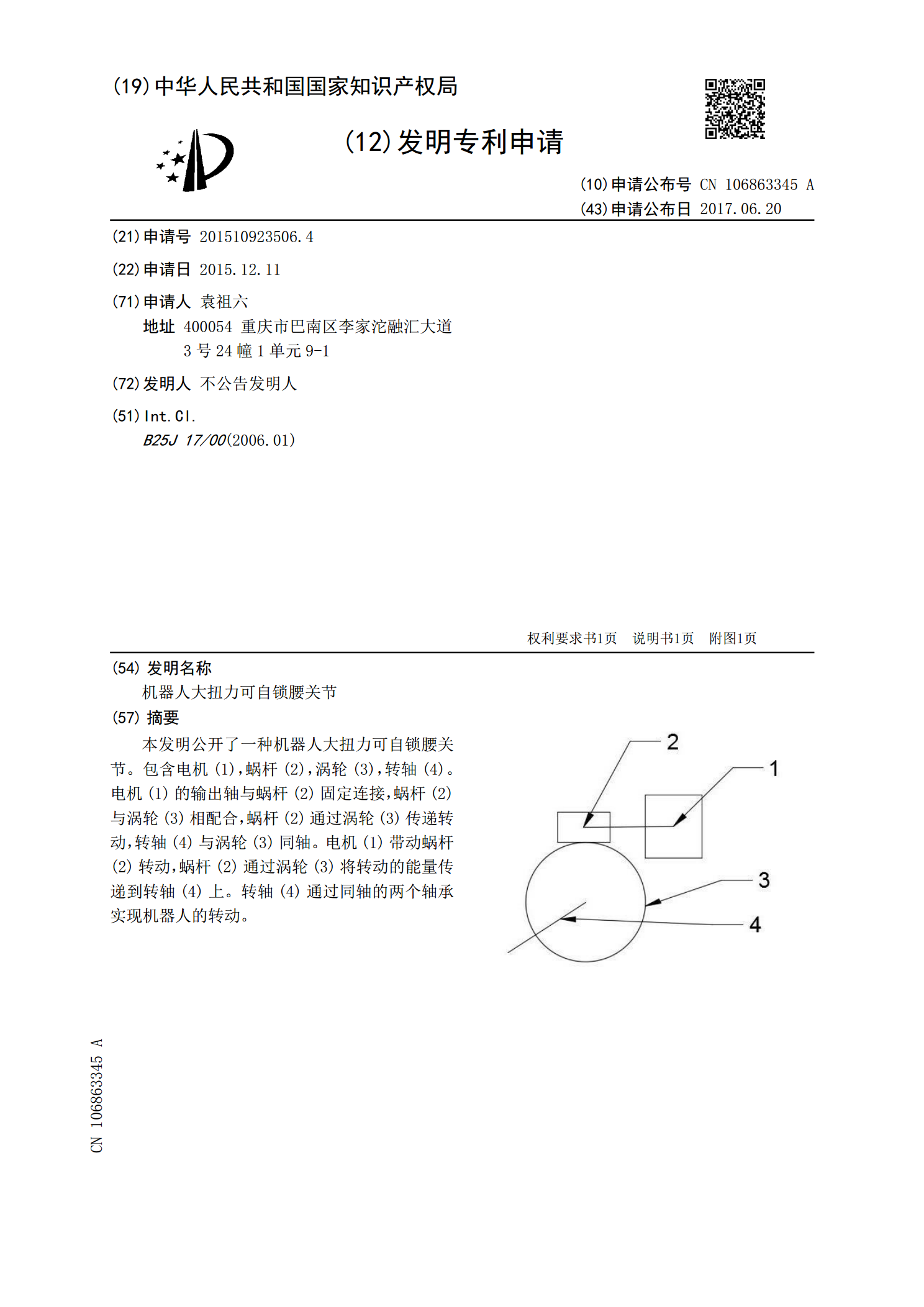
本发明公开了一种机器人大扭力可自锁腰关节。包含电机(1),蜗杆(2),涡轮(3),转轴(4)。电机(1)的输出轴与蜗杆(2)固定连接,蜗杆(2)与涡轮(3)相配合,蜗杆(2)通过涡轮(3)传递转动,转轴(4)与涡轮(3)同轴。电机(1)带动蜗杆(2)转动,蜗杆(2)通过涡轮(3)将转动的能量传递到转轴(4)上。转轴(4)通过同轴的两个轴承实现机器人的转动。
一种自锁式机器人关节.pdf
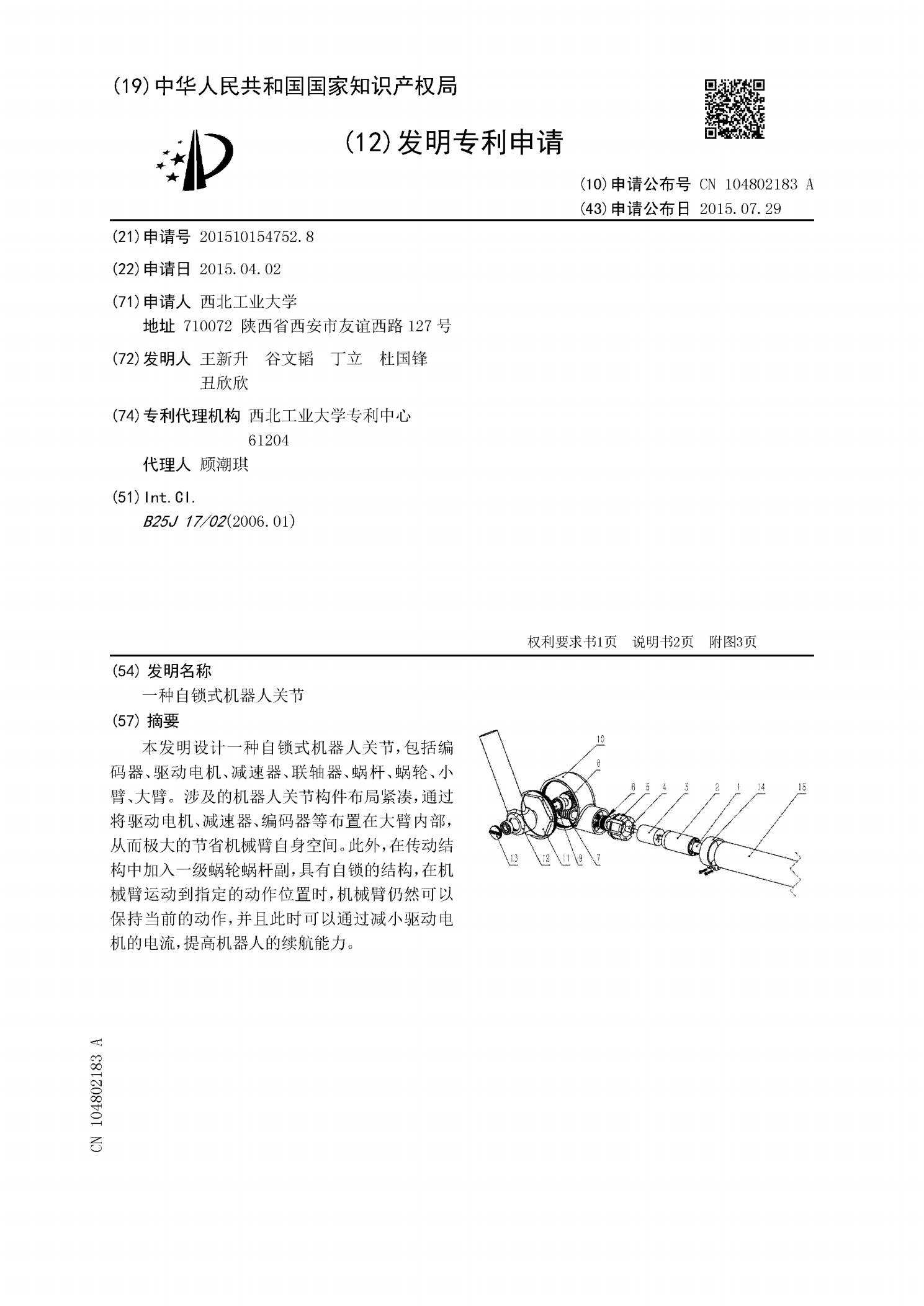
本发明设计一种自锁式机器人关节,包括编码器、驱动电机、减速器、联轴器、蜗杆、蜗轮、小臂、大臂。涉及的机器人关节构件布局紧凑,通过将驱动电机、减速器、编码器等布置在大臂内部,从而极大的节省机械臂自身空间。此外,在传动结构中加入一级蜗轮蜗杆副,具有自锁的结构,在机械臂运动到指定的动作位置时,机械臂仍然可以保持当前的动作,并且此时可以通过减小驱动电机的电流,提高机器人的续航能力。

一种具有防腐功能的机器人关节模组.pdf
本实用新型涉及机器人技术领域,公开了一种具有防腐功能的机器人关节模组,包括沿同一中心线相对转动的两个部件、第一密封件、定位件以及压缩弹簧;第一密封件设置在两个部件之间;定位件一端与一部件固定连接,另一端与第一密封件沿定位件的延伸方向活动连接,与定位件固定连接的部件与第一密封件之间沿定位件的延伸方向设置有呈压缩状态的压缩弹簧;本申请提供的一种具有防腐功能的机器人关节模组,既有效提高了密封性能,进而实现了防腐,同时使密封部位结构简单、安装方便,提高了经济效益。