
一种具有自锁功能的机器人机械手爪.pdf

韶敏****ab

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有自锁功能的机器人机械手爪.pdf
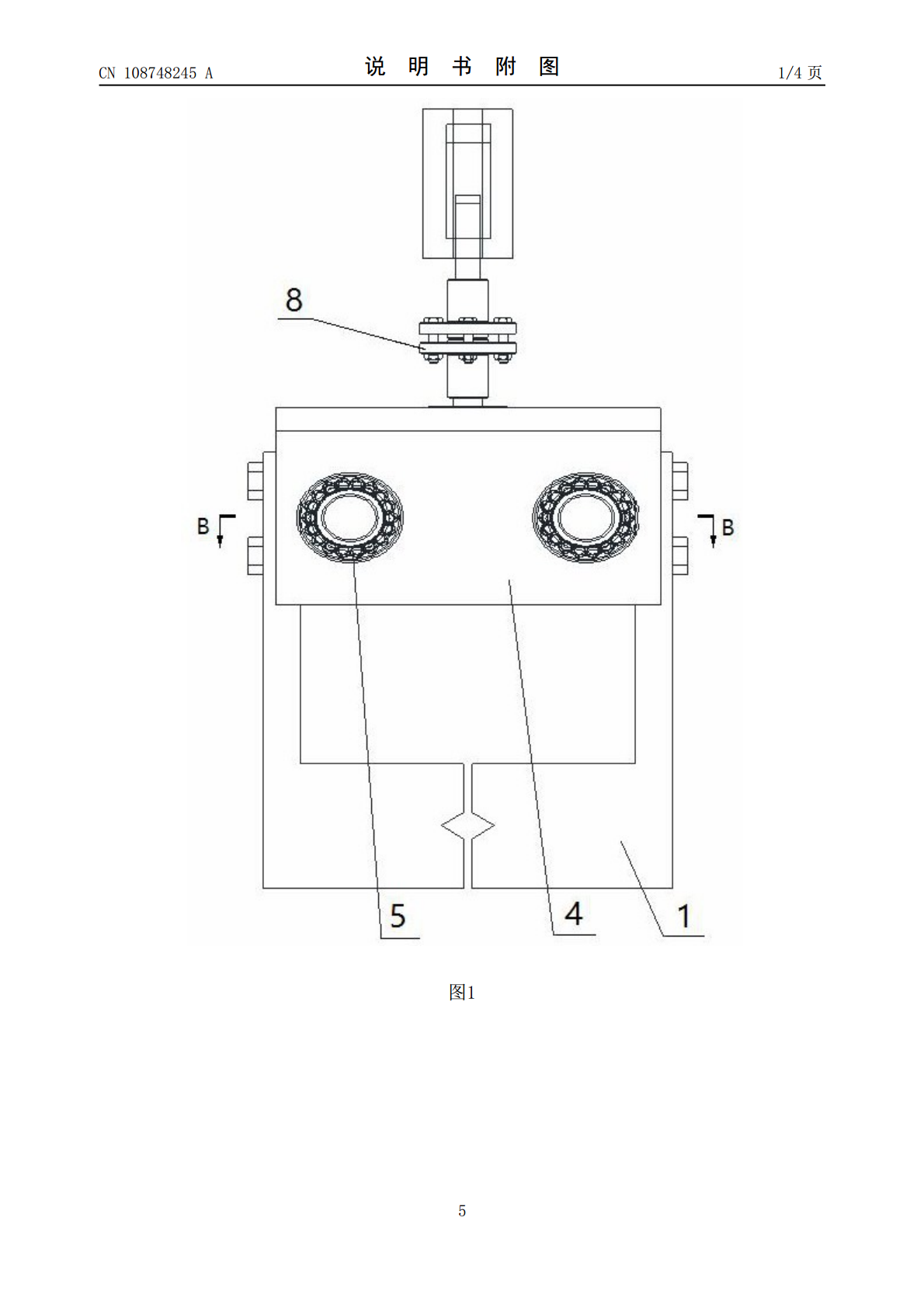
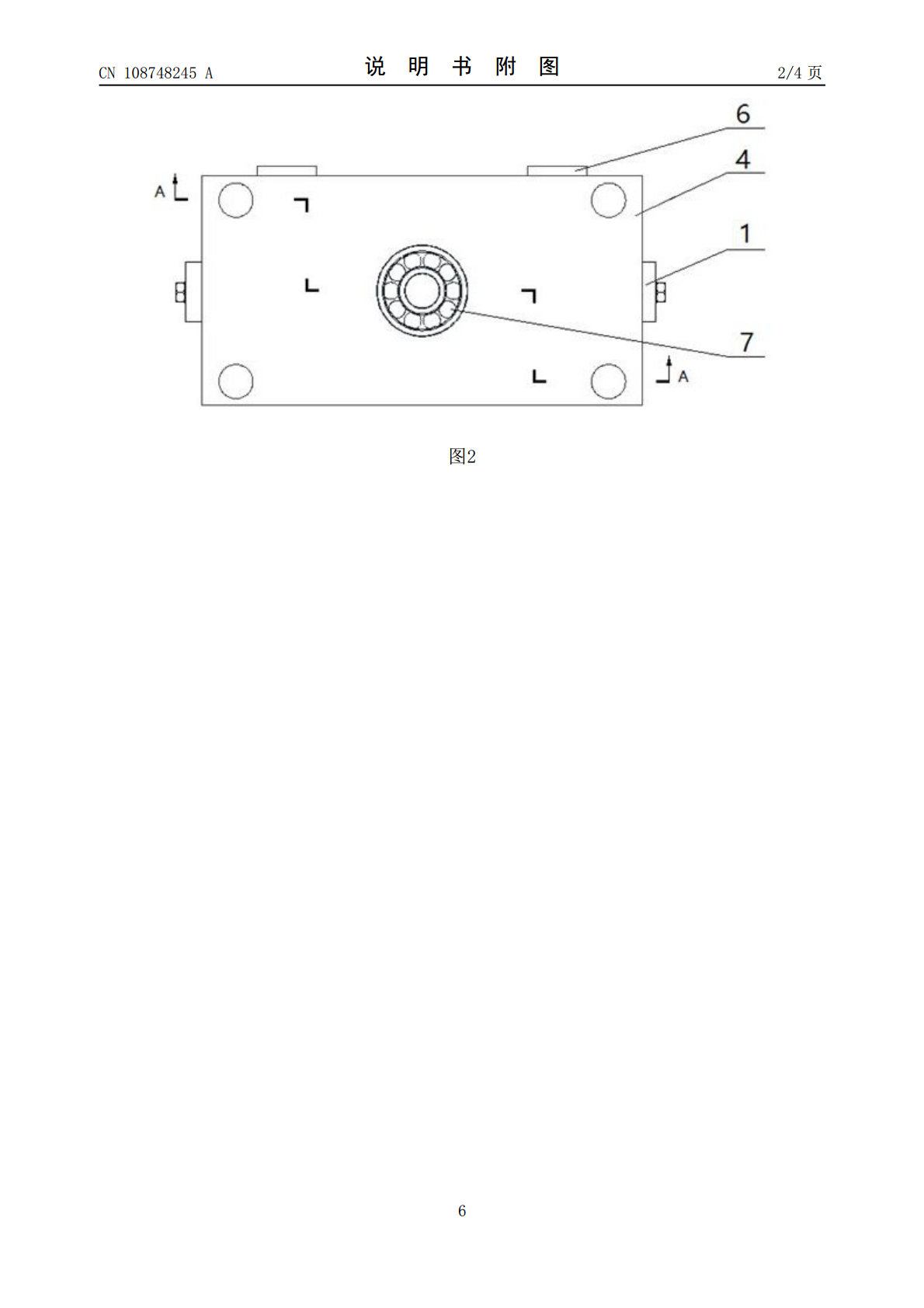
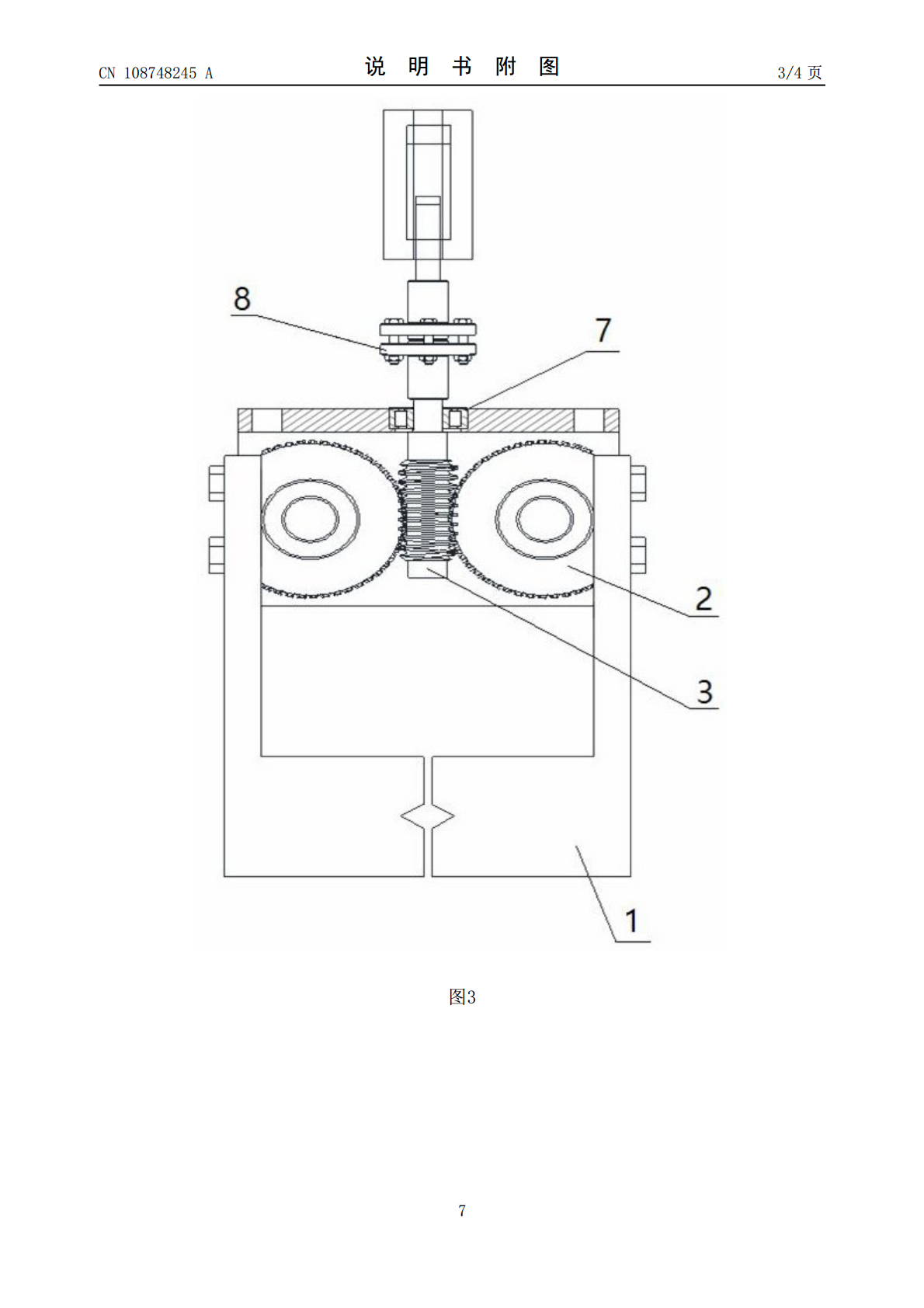
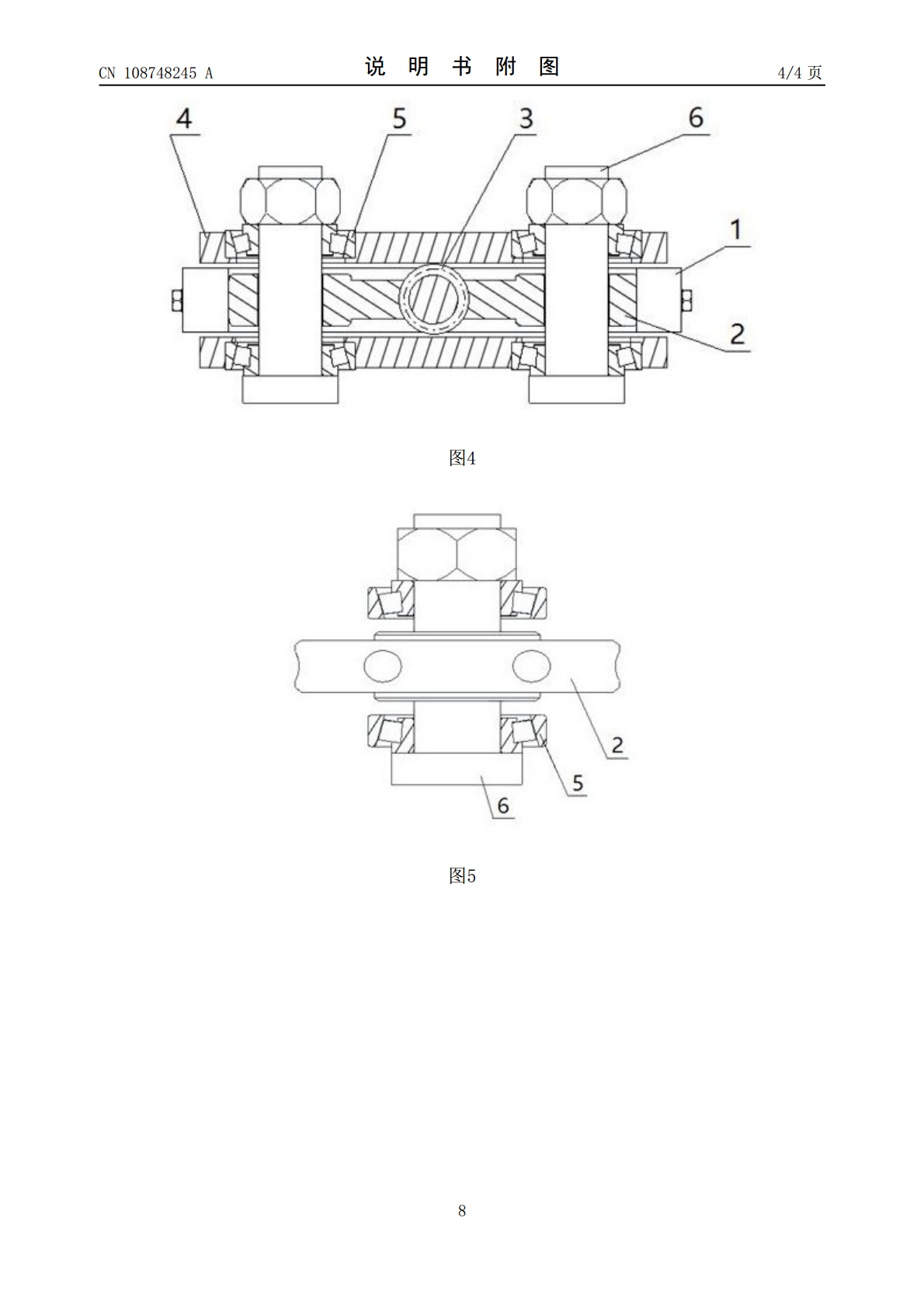
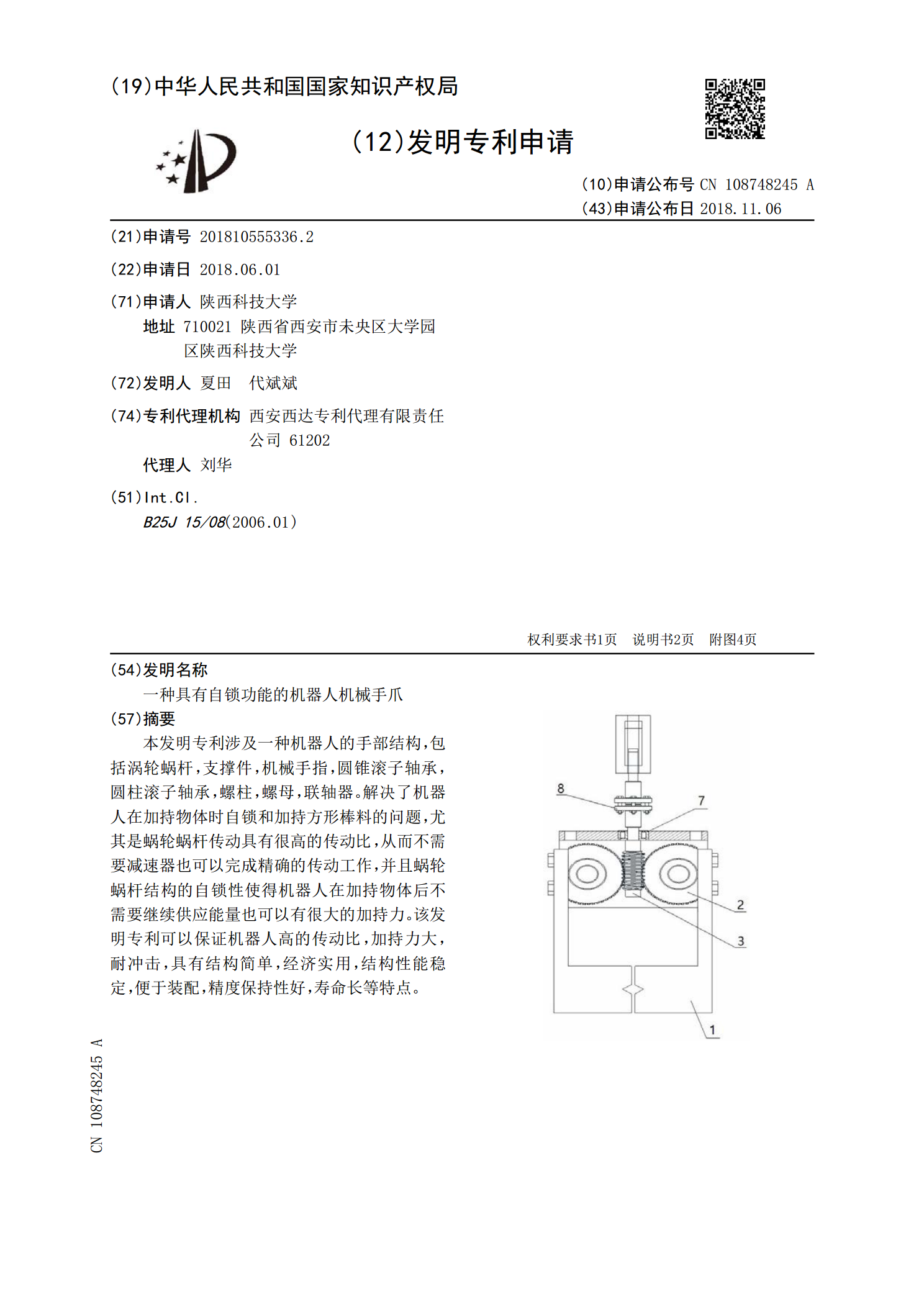
本发明专利涉及一种机器人的手部结构,包括涡轮蜗杆,支撑件,机械手指,圆锥滚子轴承,圆柱滚子轴承,螺柱,螺母,联轴器。解决了机器人在加持物体时自锁和加持方形棒料的问题,尤其是蜗轮蜗杆传动具有很高的传动比,从而不需要减速器也可以完成精确的传动工作,并且蜗轮蜗杆结构的自锁性使得机器人在加持物体后不需要继续供应能量也可以有很大的加持力。该发明专利可以保证机器人高的传动比,加持力大,耐冲击,具有结构简单,经济实用,结构性能稳定,便于装配,精度保持性好,寿命长等特点。

具有自锁功能的机器人关节模块及机器人.pdf
本发明公布一种具有自锁功能的模块化关节机器人。机器人关节中采用蜗轮蜗杆的传动方式,机构可实现反向自锁功能。与传统方法相比,本发明具有的显著优点包括传动比大、承载能力强、传动平稳、结构紧凑,不需额外抱闸装置、成本降低;由于采用了模块化设计,系统的柔性、可扩展性、可交换性较高。本发明适合需要动静态位姿保持或者对定位精度、可靠性、安全性要求较高的场合。

一种具有自锁功能的扳手.pdf
本发明提供了一种具有自锁功能的扳手,包括扳手主体,所述扳手主体的前端具有一体成形的固定端,所述扳手主体上开设有容纳槽,所述容纳槽内设有可沿固定端方向移动的活动端及控制活动端移动的液压锁定装置,所述容纳槽内还设有锁定活动端移动的自锁装置,所述自锁装置包括前端与活动端固接的定位传动条及设于定位传动条后端的定位压紧机构。本发明工作效率高、操作简便,克服了传统活动扳手中蜗杆与活动端上的齿条相啮合时形成的机械磨损,具有液压自动锁合功能,安全可靠。

一种具有自锁功能的拉链.pdf
本发明公开了一种具有自锁功能的拉链,包括拉头、两片链带以及设置于链带上的若干链牙;所述拉头包括用于将链带夹在其中的塑料材质的夹板部、位于所述夹板部上的锁紧部以及位于所述锁紧部上的塑料材质的拉环,所述锁紧部包括垂直于所述上夹板的塑料材质的竖板部,在所述竖板部内部沿其长方向开设有一方形槽,在所述竖板部内部并位于所述方形槽的向前侧的延长线上还开设有一方形孔,一塑料材质的方形杆插入到所述方形孔内并连接于一位于所述方形槽内的塑料材质的滑块,在所述滑块的下端面固定有一磁铁。本发明的自锁拉链,结构简单,操作方便,在拉链
一种具有自锁功能的气缸.pdf
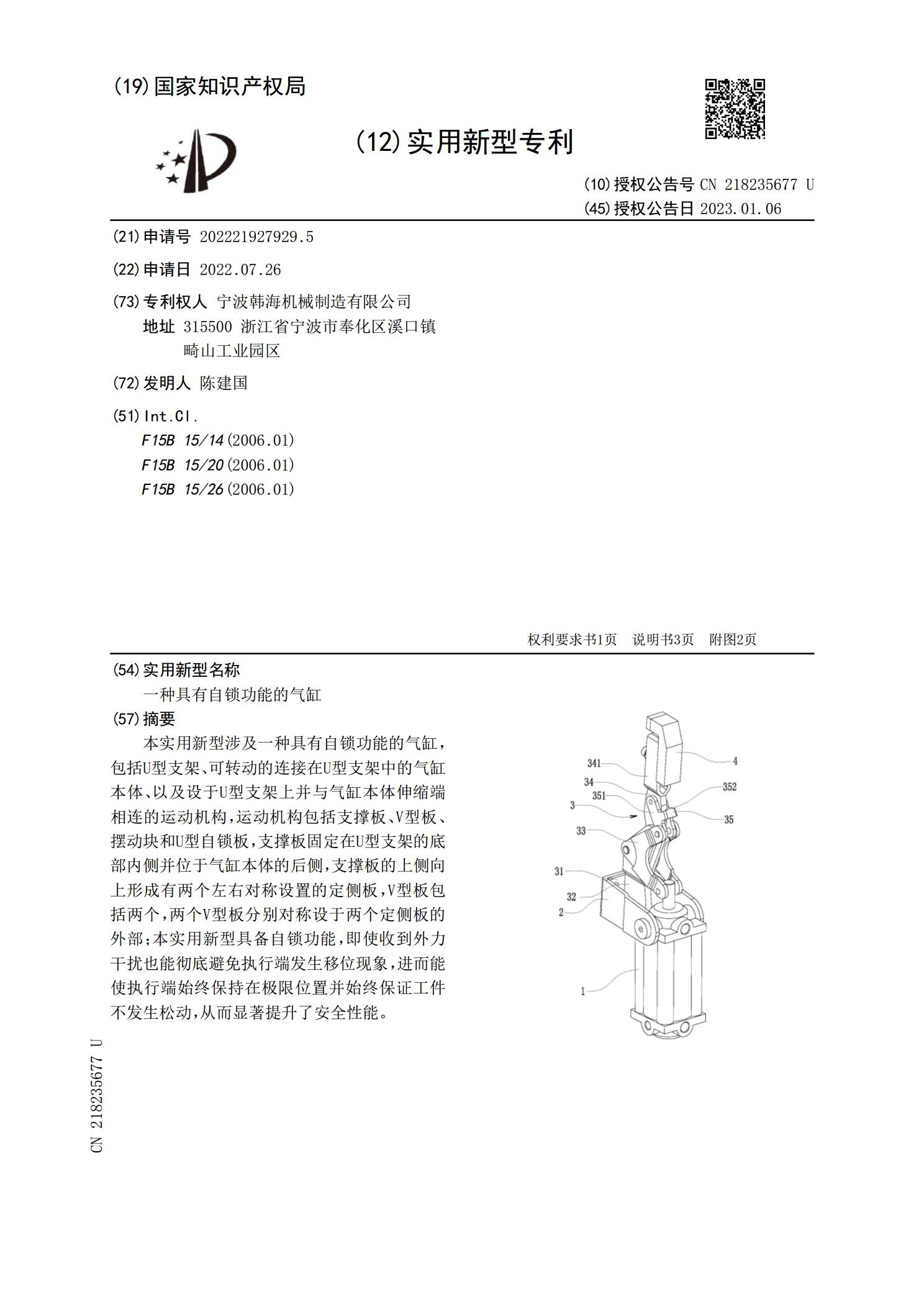
本实用新型涉及一种具有自锁功能的气缸,包括U型支架、可转动的连接在U型支架中的气缸本体、以及设于U型支架上并与气缸本体伸缩端相连的运动机构,运动机构包括支撑板、V型板、摆动块和U型自锁板,支撑板固定在U型支架的底部内侧并位于气缸本体的后侧,支撑板的上侧向上形成有两个左右对称设置的定侧板,V型板包括两个,两个V型板分别对称设于两个定侧板的外部;本实用新型具备自锁功能,即使收到外力干扰也能彻底避免执行端发生移位现象,进而能使执行端始终保持在极限位置并始终保证工件不发生松动,从而显著提升了安全性能。