
机器人大扭力可自锁腰关节.pdf

一条****然后


1/4

2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人大扭力可自锁腰关节.pdf
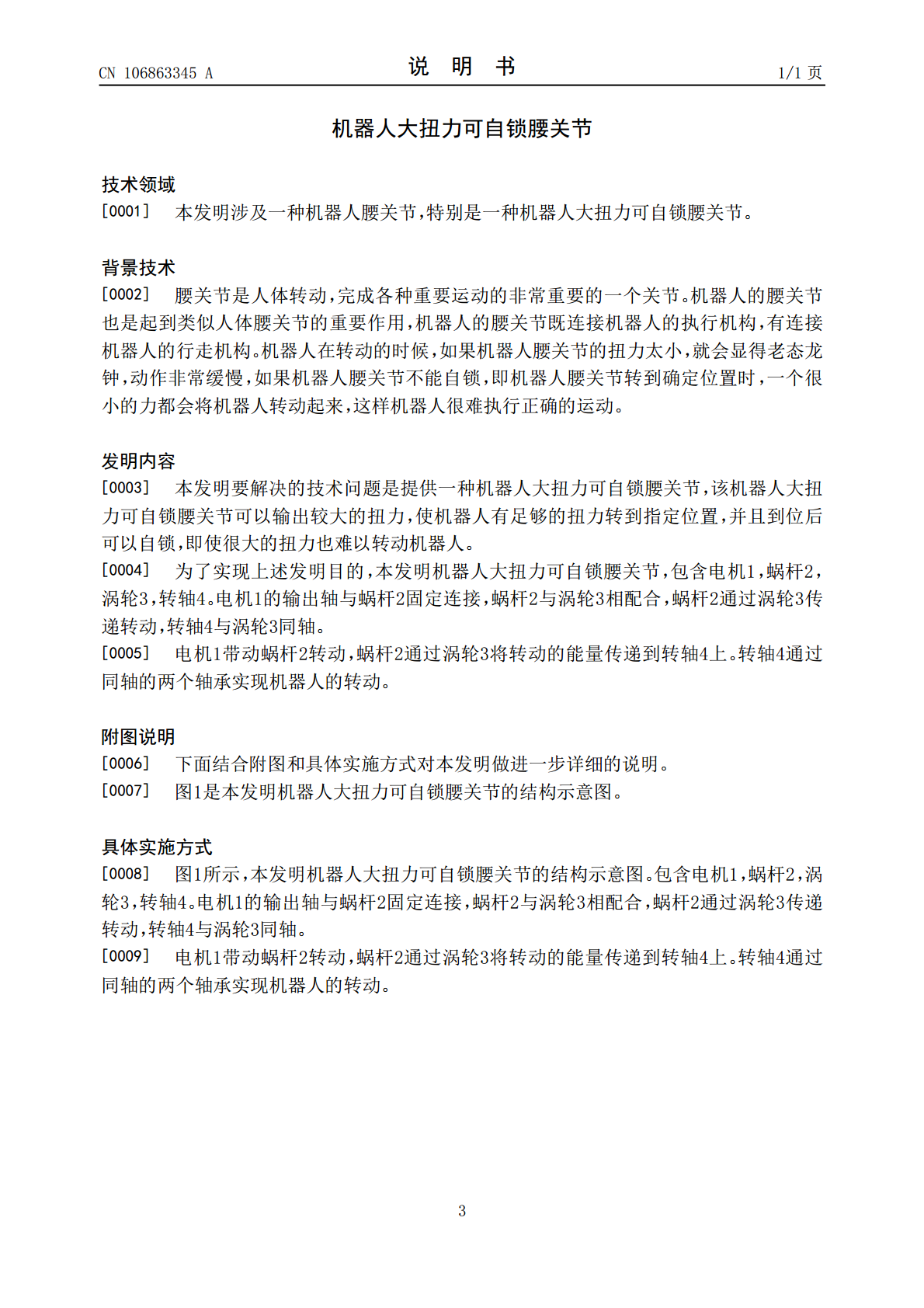
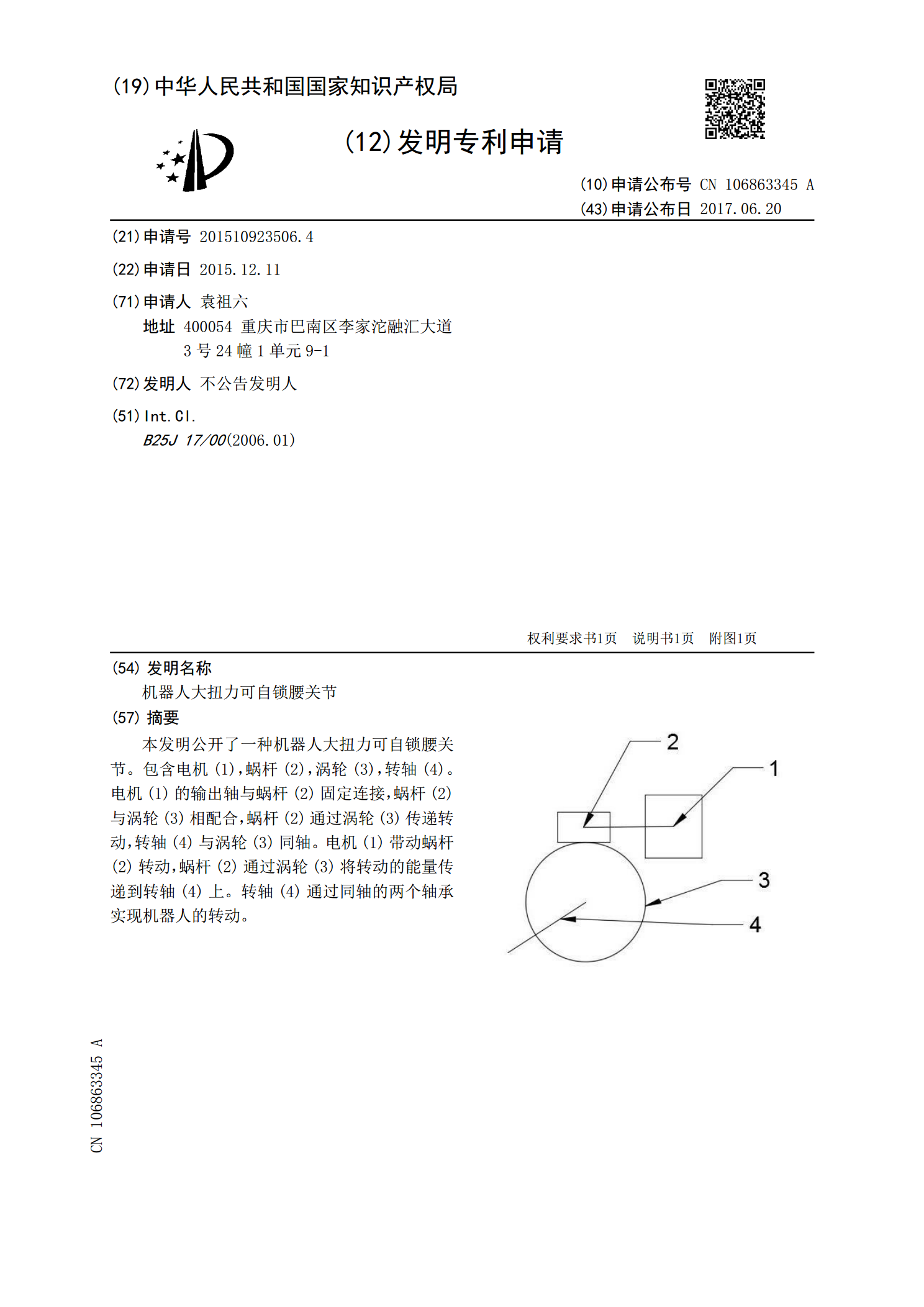
本发明公开了一种机器人大扭力可自锁腰关节。包含电机(1),蜗杆(2),涡轮(3),转轴(4)。电机(1)的输出轴与蜗杆(2)固定连接,蜗杆(2)与涡轮(3)相配合,蜗杆(2)通过涡轮(3)传递转动,转轴(4)与涡轮(3)同轴。电机(1)带动蜗杆(2)转动,蜗杆(2)通过涡轮(3)将转动的能量传递到转轴(4)上。转轴(4)通过同轴的两个轴承实现机器人的转动。

具有自锁功能的机器人关节模块及机器人.pdf
本发明公布一种具有自锁功能的模块化关节机器人。机器人关节中采用蜗轮蜗杆的传动方式,机构可实现反向自锁功能。与传统方法相比,本发明具有的显著优点包括传动比大、承载能力强、传动平稳、结构紧凑,不需额外抱闸装置、成本降低;由于采用了模块化设计,系统的柔性、可扩展性、可交换性较高。本发明适合需要动静态位姿保持或者对定位精度、可靠性、安全性要求较高的场合。
一种自锁式机器人关节.pdf
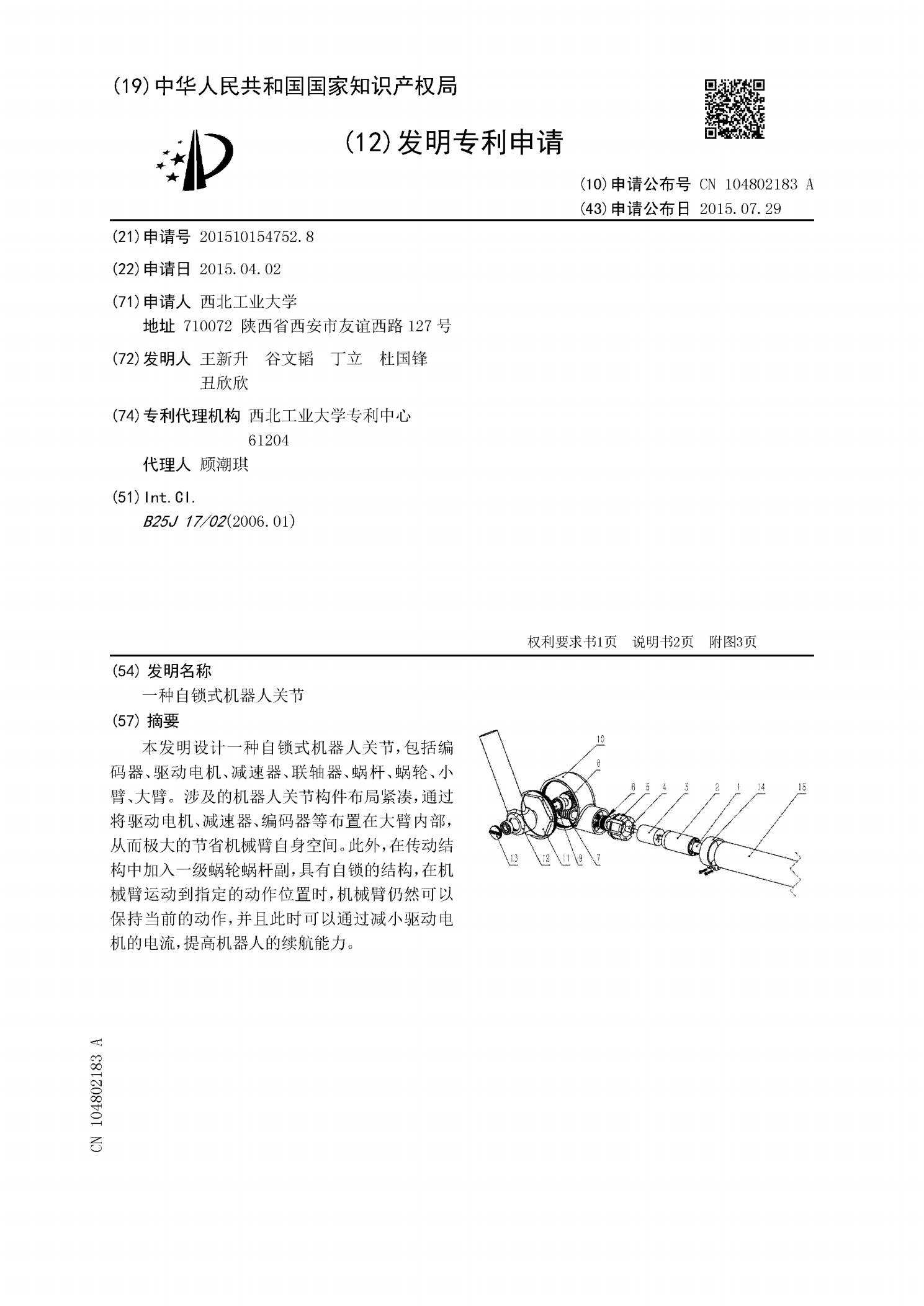
本发明设计一种自锁式机器人关节,包括编码器、驱动电机、减速器、联轴器、蜗杆、蜗轮、小臂、大臂。涉及的机器人关节构件布局紧凑,通过将驱动电机、减速器、编码器等布置在大臂内部,从而极大的节省机械臂自身空间。此外,在传动结构中加入一级蜗轮蜗杆副,具有自锁的结构,在机械臂运动到指定的动作位置时,机械臂仍然可以保持当前的动作,并且此时可以通过减小驱动电机的电流,提高机器人的续航能力。

可自锁的窗户.pdf
本发明公开了一种可自锁的窗户,所述窗户安装在墙体上;所述自锁窗户包括窗户本体、连接件、弹簧、L形锁钩、凸轮、杆件;关窗时,推动所述窗户朝着墙壁的方向移动时,杆件推动L形锁钩的顶端向后运动,导致L形锁钩绕着连接件逆时针旋转,L形锁钩末端的凸起进入第二矩形腔的槽,并勾住第二矩形腔的腔壁,从而形成自锁。当需要重新打开窗时,旋转凸轮,使得凸轮的直径与杆件接触,杆件在第一弹簧的作用下缩回,伸出墙壁的长度变小,与杆件在第二弹簧的拉力作用下顺时针旋转,所述钩子的前端不再勾住第二矩形腔的腔壁,从而形成解锁。本发明略去了传
一种自锁机构及自锁式关节刨削器.pdf
本发明提供了一种自锁机构,涉及医用刀具技术领域。该自锁机构包括从外到内依次套接的旋转套筒、连接筒和连接柱;旋转套筒的内壁设置有限位环台,连接筒的第一端面朝向限位环台;第一端面上设置有第一槽口,限位环台上设置有第二槽口;连接柱的环面上设置有限位凸块;旋转套筒和连接筒之间设置有弹性件和止退装置,弹性件用于驱动旋转套筒相对于连接筒转动,止退装置用于限制旋转套筒相对于连接筒沿旋转套筒的轴线方向移动。本发明的自锁机构,利用旋转套筒、连接筒和连接柱三个结构以及弹性件和止退装置,通过上述部件之间的相对转动和移动操作,解