
车辆制动控制装置以及车辆制动控制方法.pdf

Ma****57

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆的制动控制装置、车辆的控制装置以及车辆的制动控制方法.pdf
本发明涉及车辆的制动控制装置、车辆的控制装置以及车辆的制动控制方法,即使在使车辆停车的情况下驾驶员进行了减小对车轮的制动力的制动器操作,也能够抑制驾驶员不希望的车辆的移动。在由驾驶员进行了减小对车轮的制动力的制动器操作的情况下,在主缸内的MC压力(Pmc)变为被设定为与路面的坡度对应的值的坡度相当MC压力(Pmctha)以下的第2时刻(t12),制动器用ECU开始保持对车轮的制动力的第1制动控制,之后,在路面的坡度变化成陡坡度侧的情况下,开始使对车轮的制动力增大的第2制动控制(第3时刻t13)。

车辆制动控制装置以及车辆制动控制方法.pdf
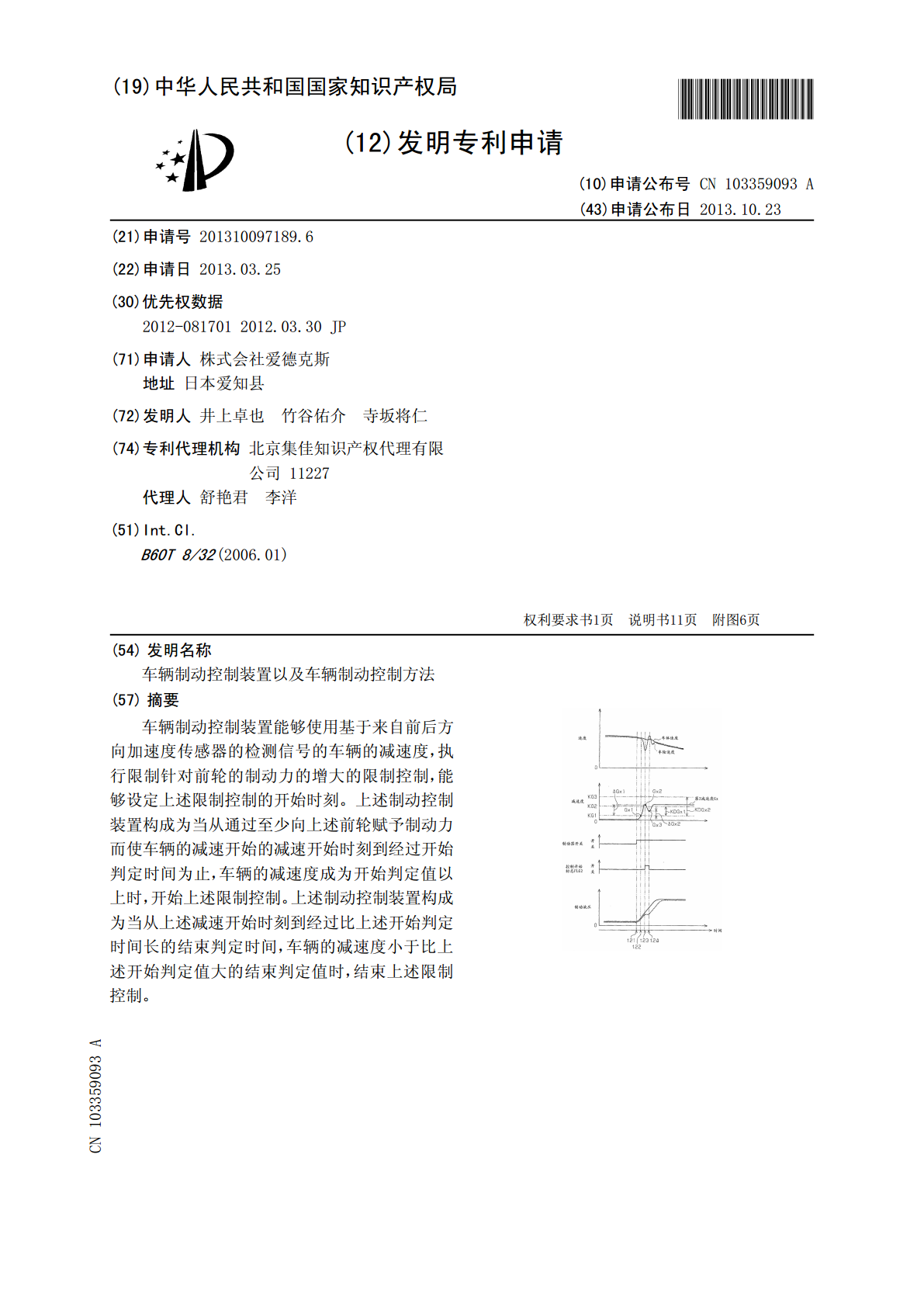
车辆制动控制装置能够使用基于来自前后方向加速度传感器的检测信号的车辆的减速度,执行限制针对前轮的制动力的增大的限制控制,能够设定上述限制控制的开始时刻。上述制动控制装置构成为当从通过至少向上述前轮赋予制动力而使车辆的减速开始的减速开始时刻到经过开始判定时间为止,车辆的减速度成为开始判定值以上时,开始上述限制控制。上述制动控制装置构成为当从上述减速开始时刻到经过比上述开始判定时间长的结束判定时间,车辆的减速度小于比上述开始判定值大的结束判定值时,结束上述限制控制。

车辆制动控制装置以及车辆制动控制方法.pdf
本发明涉及车辆制动控制装置以及车辆制动控制方法。其中,车辆制动控制装置在驾驶员在车辆的转弯时进行制动操作时,能够执行对针对位于转弯内侧的车轮亦即内侧车轮的制动力的增大进行限制的限制控制。车辆制动控制装置构成为,在随着上述内侧车轮的减速度变大而变大的车轮状态值超过设定为比零大的值的开始判定值时,开始上述限制控制。

用于车辆的制动力控制装置以及用于车辆的制动力控制方法.pdf
一种制动力控制装置(100),其包括斜置双系统制动设备并通过独立控制左右后轮的制动压力来执行制动力的前后轮分配控制,以在制动期间获得左右后轮以及前轮的轮速之间的目标关系。确定一个系统的一个车轮和另一系统的一个车轮之间的轮速差或一个系统的另一车轮和另一系统的另一车轮之间的轮速差是否超过阈值(S170,270)。当超过阈值时,相对于左右后轮中具有较低轮速的后轮,不通过制动力的前后轮分配控制执行制动压力的降低(S190,290)。
拖车的制动控制方法、装置、制动控制器、介质以及车辆.pdf
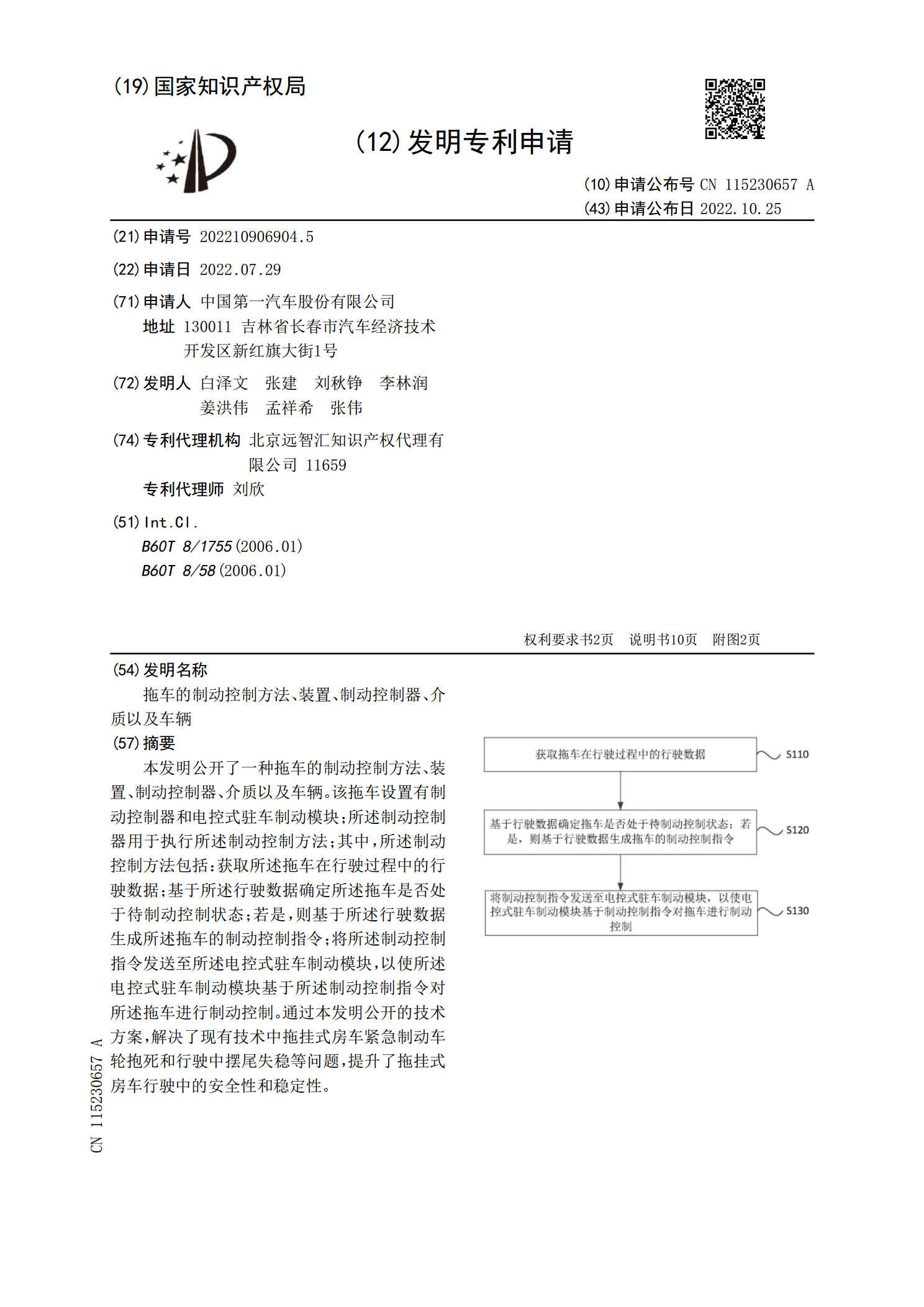
本发明公开了一种拖车的制动控制方法、装置、制动控制器、介质以及车辆。该拖车设置有制动控制器和电控式驻车制动模块;所述制动控制器用于执行所述制动控制方法;其中,所述制动控制方法包括:获取所述拖车在行驶过程中的行驶数据;基于所述行驶数据确定所述拖车是否处于待制动控制状态;若是,则基于所述行驶数据生成所述拖车的制动控制指令;将所述制动控制指令发送至所述电控式驻车制动模块,以使所述电控式驻车制动模块基于所述制动控制指令对所述拖车进行制动控制。通过本发明公开的技术方案,解决了现有技术中拖挂式房车紧急制动车轮抱死和行