
用于调节踏板驱动的车辆的方法和调节装置.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于调节踏板驱动的车辆的方法和调节装置.pdf
根据本发明,提出一种用于调节具有驱动单元(12)的踏板驱动式车辆(1)的方法,所述车辆包括踏板驱动装置(25)和作为辅助驱动装置的马达(10),所述方法具有如下步骤:检测打滑参数(n、nmot),所述打滑参数与受驱动车轮的转动速度相关;检测由所述马达施加的转矩(马达转矩);检测由驾驶员通过蹬踏施加的、也被称为踏板转矩的转矩;根据检测的打滑参数来调节所述驱动单元,其中,根据检测的打滑参数来调节马达转矩和踏板转矩的总和。

调节混合动力电动车辆的混合驱动装置的方法和调节装置.pdf
本发明涉及一种用于调节混合动力电动车辆的混合动力驱动装置的方法,该混合动力电动车辆具有电能存储器(HV),所述方法具有下列步骤:借助于能设定的行驶模式来规定(S1)用于接通电驱动装置(EM1;EM1、EM2)和/或内燃机(VM)的标准,其中,通过可变的设定来保留电能存储器(HV)的电池容量的一个份额,并且通过规定的标准以及通过可变的设定来调节(S2)混合动力电动车辆的电驱动装置(EM1;EM1、EM2)和/或内燃机(VM)的接通。

用于调节车辆纵向位置的方法和装置.pdf
本发明涉及一种用于调节车辆、尤其是自主驾驶车辆的纵向位置的方法,其中,借助纵向位置调节器(7.1)根据纵向动力学预调理论参数(a_set)并根据纵向动力学调节误差参数(s_err,v_err,a_err)产生纵向加速度调节信号(U_asoll_sum,U_asoll),用以对车辆的驱动装置(9)和制动装置(10)起作用的下级加速度调节单元(8),对应于当前时刻(t
用于调节车辆运动的方法和用于执行该方法的装置.pdf
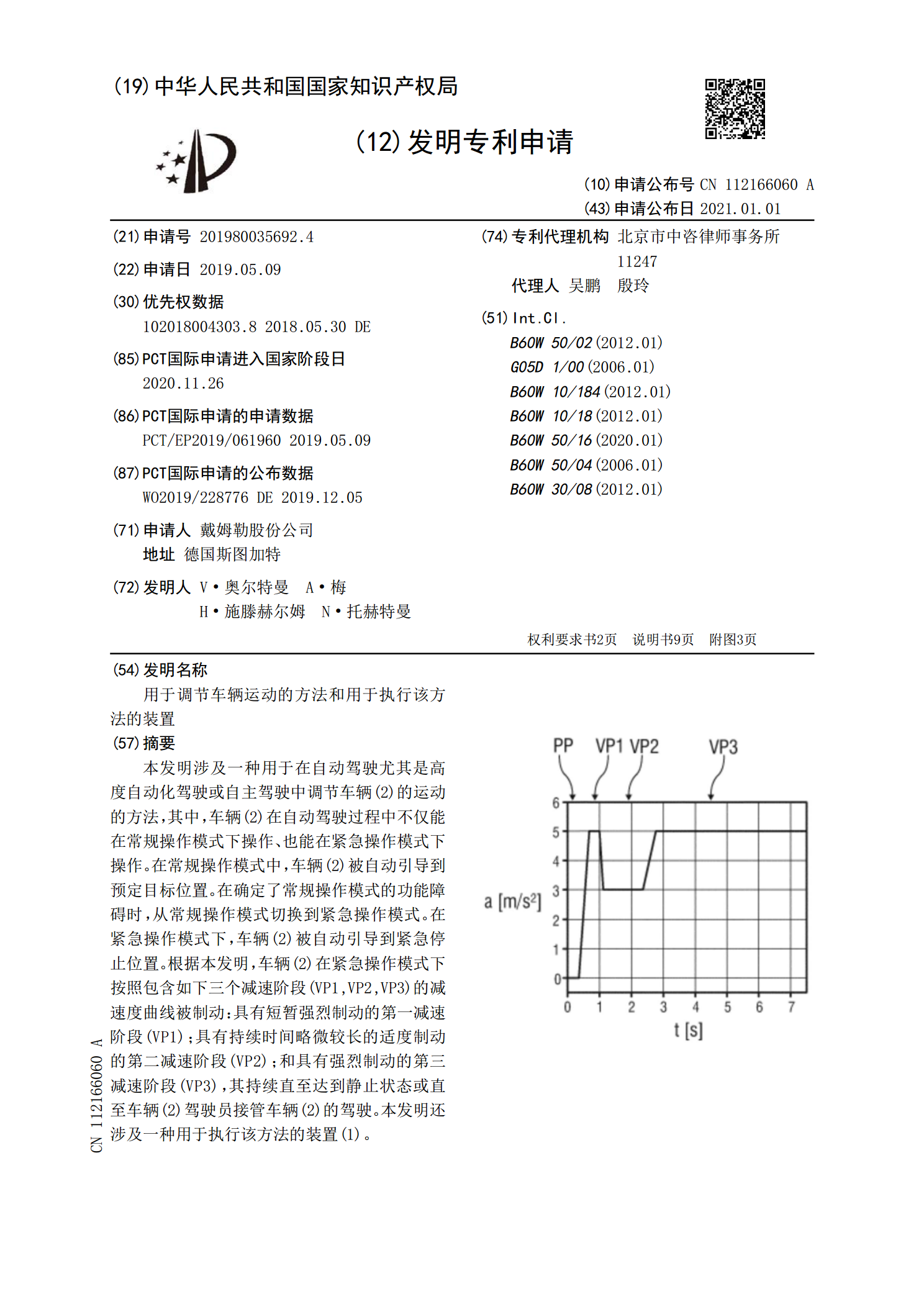
本发明涉及一种用于在自动驾驶尤其是高度自动化驾驶或自主驾驶中调节车辆(2)的运动的方法,其中,车辆(2)在自动驾驶过程中不仅能在常规操作模式下操作、也能在紧急操作模式下操作。在常规操作模式中,车辆(2)被自动引导到预定目标位置。在确定了常规操作模式的功能障碍时,从常规操作模式切换到紧急操作模式。在紧急操作模式下,车辆(2)被自动引导到紧急停止位置。根据本发明,车辆(2)在紧急操作模式下按照包含如下三个减速阶段(VP1,VP2,VP3)的减速度曲线被制动:具有短暂强烈制动的第一减速阶段(VP1);具有持续时

用于机动车辆座椅的调节装置的调节驱动器.pdf
本发明涉及一种用于机动车辆座椅的调节装置的调节驱动器,该调节驱动器包括:驱动马达(1);两级减速齿轮(4、6、7);以及用于安装驱动马达(1)并且用于容纳两级减速齿轮(4、6、7)的罩(2、3)。第一减速齿轮级(4)的齿轮元件布置在罩(2、3)的罩壳(2)中,其中所述罩壳可以由罩盖(3)封闭。在能够与罩壳(2)连接的前端组件(5)中,第二减速齿轮级(6、7)的齿轮元件中的至少一些被布置在罩盖(3)与连接到罩盖(3)的盖板(8)或盖导板(9)之间并且在轴向方向上被支撑。