
用于调节车辆纵向位置的方法和装置.pdf

思洁****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于调节车辆纵向位置的方法和装置.pdf
本发明涉及一种用于调节车辆、尤其是自主驾驶车辆的纵向位置的方法,其中,借助纵向位置调节器(7.1)根据纵向动力学预调理论参数(a_set)并根据纵向动力学调节误差参数(s_err,v_err,a_err)产生纵向加速度调节信号(U_asoll_sum,U_asoll),用以对车辆的驱动装置(9)和制动装置(10)起作用的下级加速度调节单元(8),对应于当前时刻(t

用于定位车辆轮子的纵向位置的方法和装置.pdf
本发明涉及一种用于定位车辆(1)的轮子(2,3,5,6)的纵向位置的方法,根据所述定位方法,为每个轮子配备切向测量传感器(16),所述切向测量传感器适于输出包括载波的测量信号,其中所述载波的振幅和频率随着所述切向测量传感器所遭受的振动冲击而变化。此外,根据本发明,在对应于发动机(M)的爆发频率的频率带中测量所述信号的载波振幅,比较所述信号,以识别其载波对于相同频率具有最大振幅的信号,并且将其载波具有最大振幅的信号所来源的轮子(2,3)确定为对应于安装在驱动轴(4)上的轮子(2,3)。

用于纵向调节车辆座椅的调节装置.pdf
本发明涉及一种车辆座椅,其具有至少一个用于纵向调节车辆座椅(F)的调节装置,其中所述调节装置(A,B)具有:用于预设座椅纵轴线(L)以及用于支承所述调节装置(1A,1B)的至少一个调节单元(2.1,2.2)的至少一个轨道(3),沿着所述座椅纵轴线,所述车辆座椅(F)的座椅底架(G)是能调节的,和能移动地引导的并借助于螺杆(7)和与其啮合的螺杆螺母能调节的至少一个调节单元(2.1,2.2),所述座椅底架(G)能固定在所述调节单元上,以便沿着所述座椅纵轴线(L)是能调节的,其中至少一个调节单元(2.1,2.2
用于机动化纵向调节车辆座椅的纵向调节装置及车辆座椅.pdf
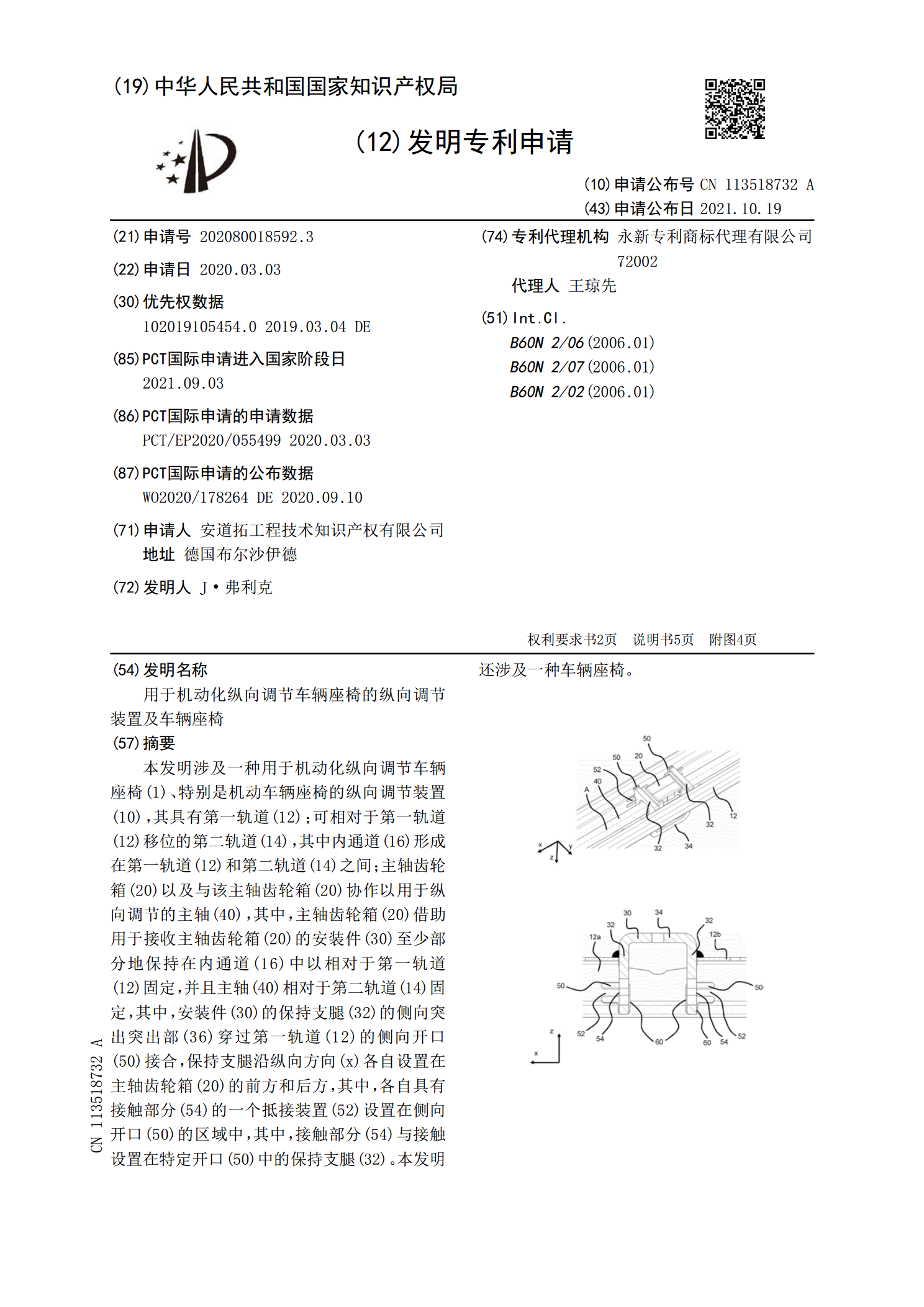
本发明涉及一种用于机动化纵向调节车辆座椅(1)、特别是机动车辆座椅的纵向调节装置(10),其具有第一轨道(12);可相对于第一轨道(12)移位的第二轨道(14),其中内通道(16)形成在第一轨道(12)和第二轨道(14)之间;主轴齿轮箱(20)以及与该主轴齿轮箱(20)协作以用于纵向调节的主轴(40),其中,主轴齿轮箱(20)借助用于接收主轴齿轮箱(20)的安装件(30)至少部分地保持在内通道(16)中以相对于第一轨道(12)固定,并且主轴(40)相对于第二轨道(14)固定,其中,安装件(30)的保持支腿

用于车辆座椅的纵向调节装置.pdf
本发明涉及一种用于车辆座椅的纵向调节装置,包括:用于固定到车辆地板的基轨(1),所述基轨(1)具有用于接触车辆地板的基壁(3);座椅轨(4),其可相对于基轨(1)运动;主轴(8),其刚性联接到基轨(1);传动装置(9),其具有与主轴(8)接合的主轴螺母且以轴向固定的方式联接到座椅轨(4);以及紧固装置(22a、22b),其被引导通过座椅轨(4)的固定壁(5)上的固定开口(20a、20b),以便将传动装置(9)固定在座椅轨(4)上。该纵向调节装置的特征在于,固定壁(5)布置成与基壁(3)成角度,且紧固装置(