
一种双控型两轮自平衡智能车.pdf

桂香****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双控型两轮自平衡智能车.pdf
一种双控型两轮自平衡智能车,其包括有机械结构和安装于该机械结构上的操控系统,该操控系统以只通过双手进行的手控操作方式或者只通过身体的协调活动进行的体控操作方式来控制智能车实现在竖直方向小倾角范围内的平稳运行;其中,机械结构包括车架和座椅式车体,操控系统包括操控方式切换开关、控制盒体、相互独立的手控部件和体控部件、核心控制芯片和驱动器。本发明实现了双重独立操控方式下两轮自平衡智能车的直立、前进、后退以及转弯功能,具有操控方便舒适、稳定性好和行进稳定灵活的优点,适合正常人士以及双手正常但身体活动障碍和双手活动

座椅型重心手控转向脚踏式两轮自平衡智能车.pdf
本发明公开了一种座椅型重心手控转向脚踏式两轮自平衡智能车,包括座椅式车体以及设置于车体上的前后控制机构、转向控制机构和控制系统;其中,所述前后控制机构设置于座椅式车体的扶手处;所述转向控制机构设置于座椅式车体的脚踏处,所述控制系统与转向控制机构相连接,并检测由前后控制机构产生的重心倾斜信号。本发明使得操控智能车前进和后退时提供的前倾后倾信号不再是由身体的前倾后仰来实现,而是通过手控来调节;而对于方向的控制,不再像现有的操控模式,通过摆杆进行转向,而是通过脚踏给出转向信号;并且,人们在控制智能车时真正地“坐

一种智能两轮自平衡电动车.pdf
本发明公开了一种智能两轮自平衡电动车,包括自平衡车体,自平衡车体包括车架、控制芯片和驱动装置,控制芯片与驱动装置连接,还包括设有控制按键的遥控器,遥控器通过第一无线通信模块与自平衡车体无线连接、用以控制自平衡车体的行驶;第一无线通信模块包括第一无线发射器和与第一无线发射器相配合使用的N个第一无线接收器,第一无线发射器安装于遥控器上、并与遥控器内的处理芯片连接,第一无线接收器安装于车架前端的中间位置上、并与控制芯片连接,其中N是≥2的整数。本结构的两轮自平衡电动车即使在没有驾驶者在自平衡车上进行操控的情况下
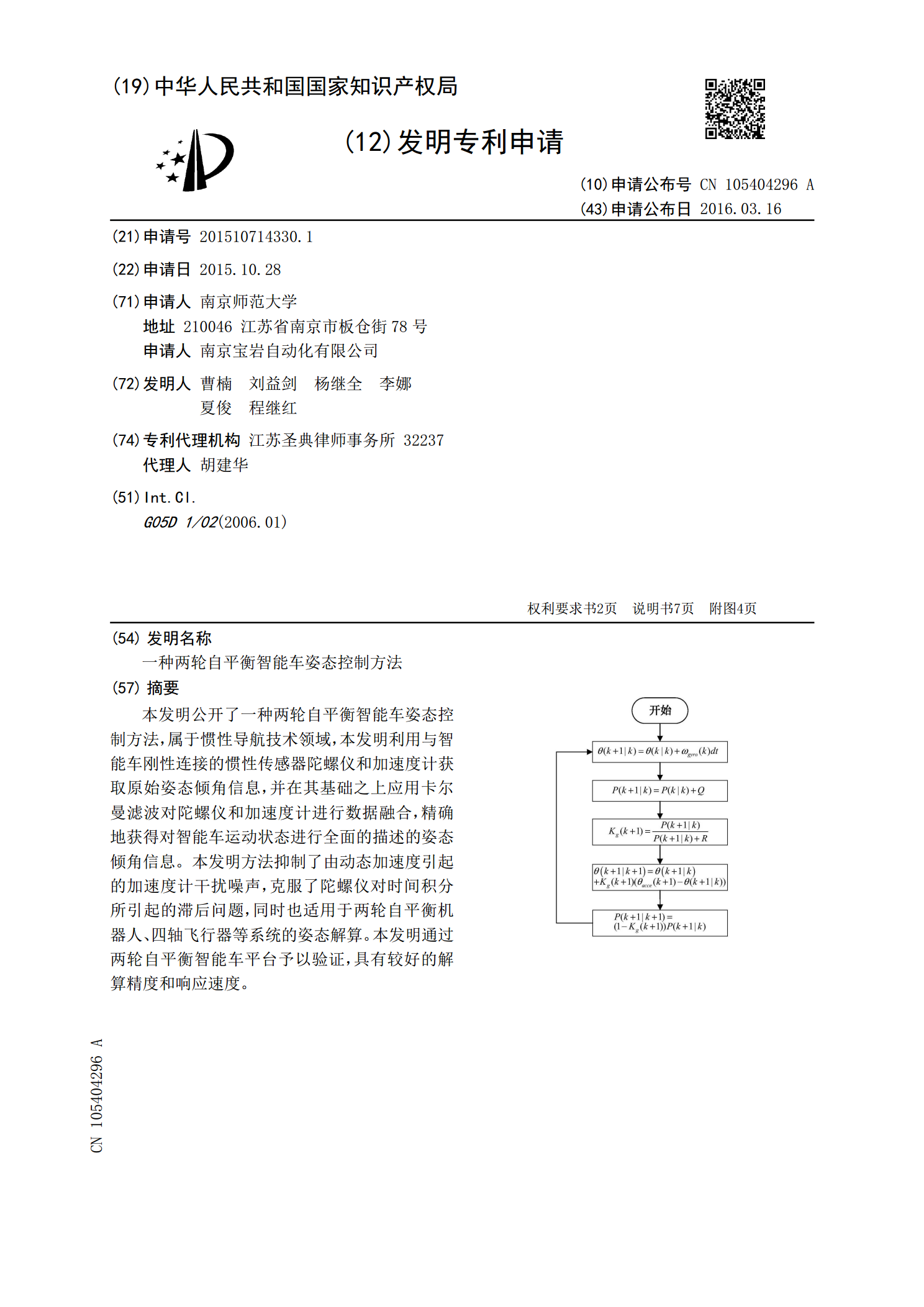
一种两轮自平衡智能车姿态控制方法.pdf
本发明公开了一种两轮自平衡智能车姿态控制方法,属于惯性导航技术领域,本发明利用与智能车刚性连接的惯性传感器陀螺仪和加速度计获取原始姿态倾角信息,并在其基础之上应用卡尔曼滤波对陀螺仪和加速度计进行数据融合,精确地获得对智能车运动状态进行全面的描述的姿态倾角信息。本发明方法抑制了由动态加速度引起的加速度计干扰噪声,克服了陀螺仪对时间积分所引起的滞后问题,同时也适用于两轮自平衡机器人、四轴飞行器等系统的姿态解算。本发明通过两轮自平衡智能车平台予以验证,具有较好的解算精度和响应速度。
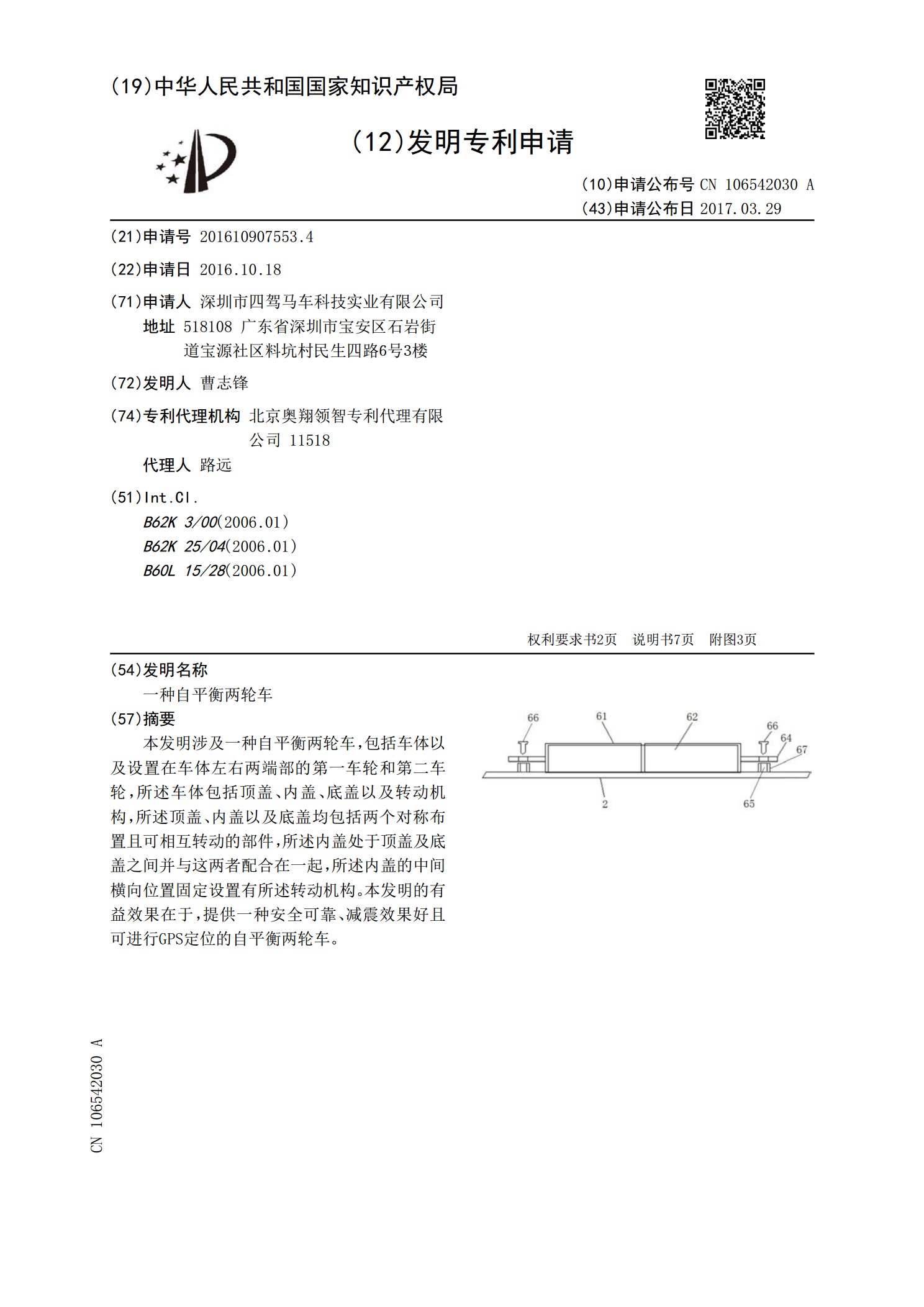
一种自平衡两轮车.pdf
本发明涉及一种自平衡两轮车,包括车体以及设置在车体左右两端部的第一车轮和第二车轮,所述车体包括顶盖、内盖、底盖以及转动机构,所述顶盖、内盖以及底盖均包括两个对称布置且可相互转动的部件,所述内盖处于顶盖及底盖之间并与这两者配合在一起,所述内盖的中间横向位置固定设置有所述转动机构。本发明的有益效果在于,提供一种安全可靠、减震效果好且可进行GPS定位的自平衡两轮车。