
一种两轮自平衡智能车姿态控制方法.pdf

是你****馨呀

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种两轮自平衡智能车姿态控制方法.pdf
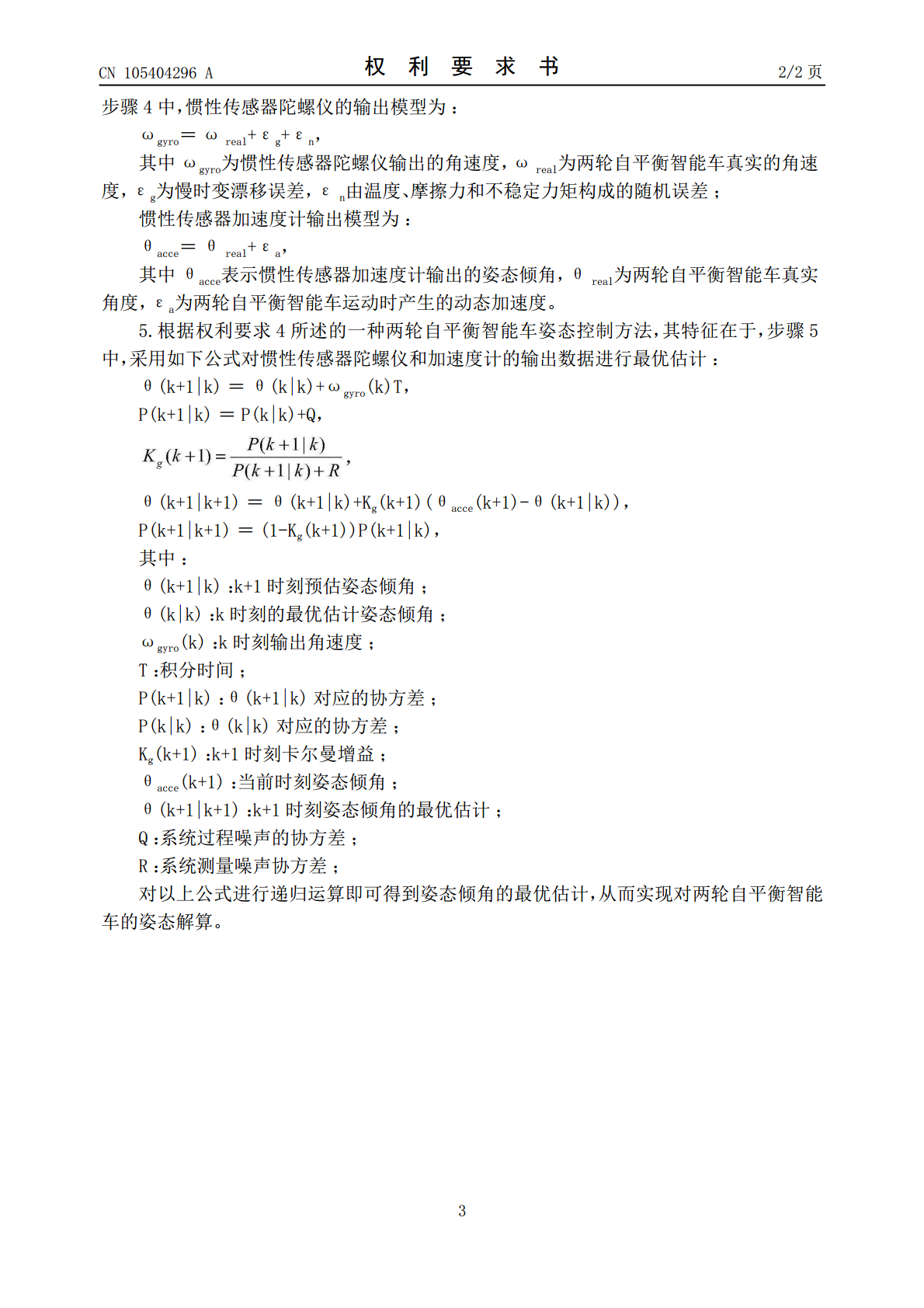
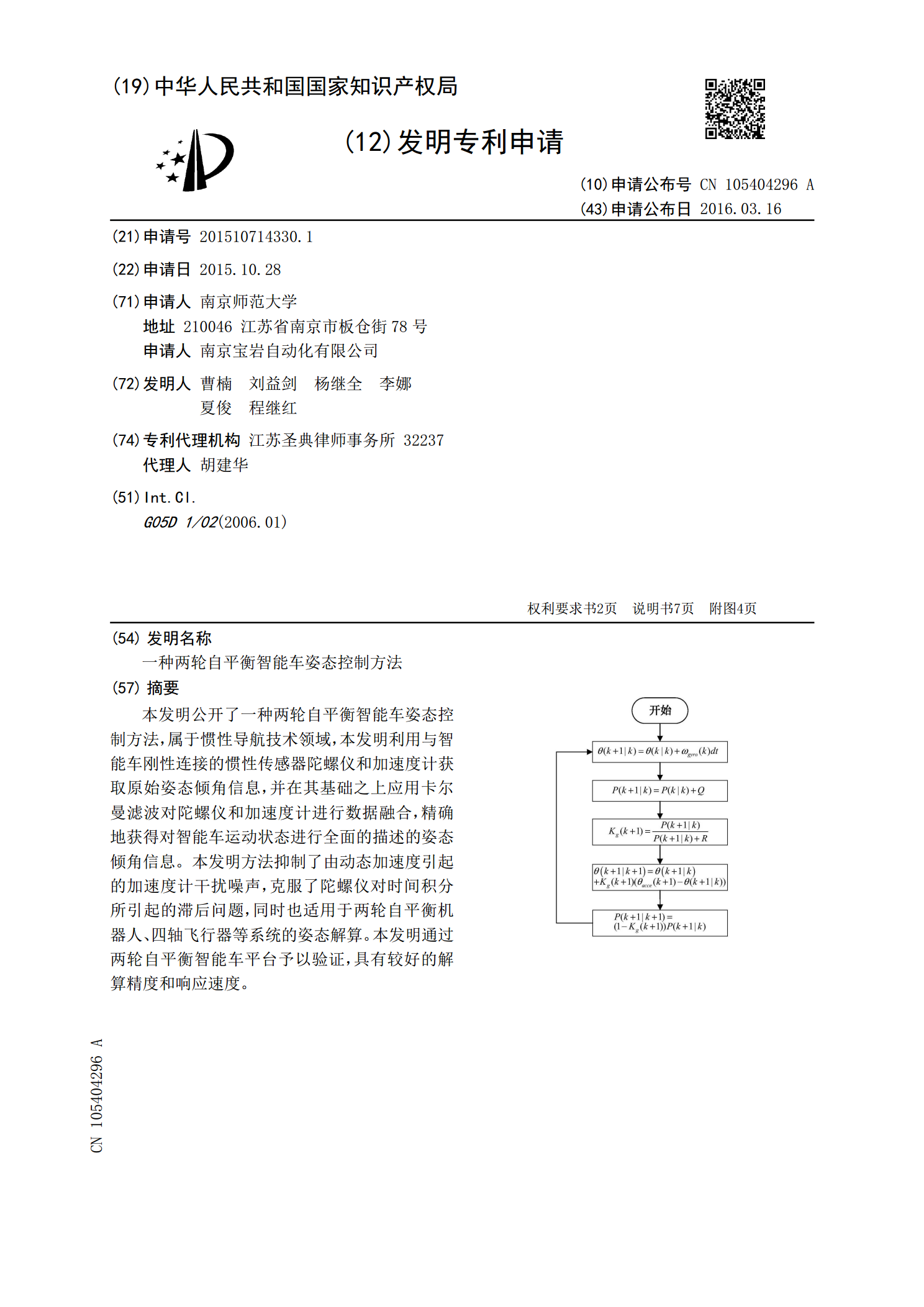
本发明公开了一种两轮自平衡智能车姿态控制方法,属于惯性导航技术领域,本发明利用与智能车刚性连接的惯性传感器陀螺仪和加速度计获取原始姿态倾角信息,并在其基础之上应用卡尔曼滤波对陀螺仪和加速度计进行数据融合,精确地获得对智能车运动状态进行全面的描述的姿态倾角信息。本发明方法抑制了由动态加速度引起的加速度计干扰噪声,克服了陀螺仪对时间积分所引起的滞后问题,同时也适用于两轮自平衡机器人、四轴飞行器等系统的姿态解算。本发明通过两轮自平衡智能车平台予以验证,具有较好的解算精度和响应速度。
一种自平衡两轮车的运动控制方法.pdf
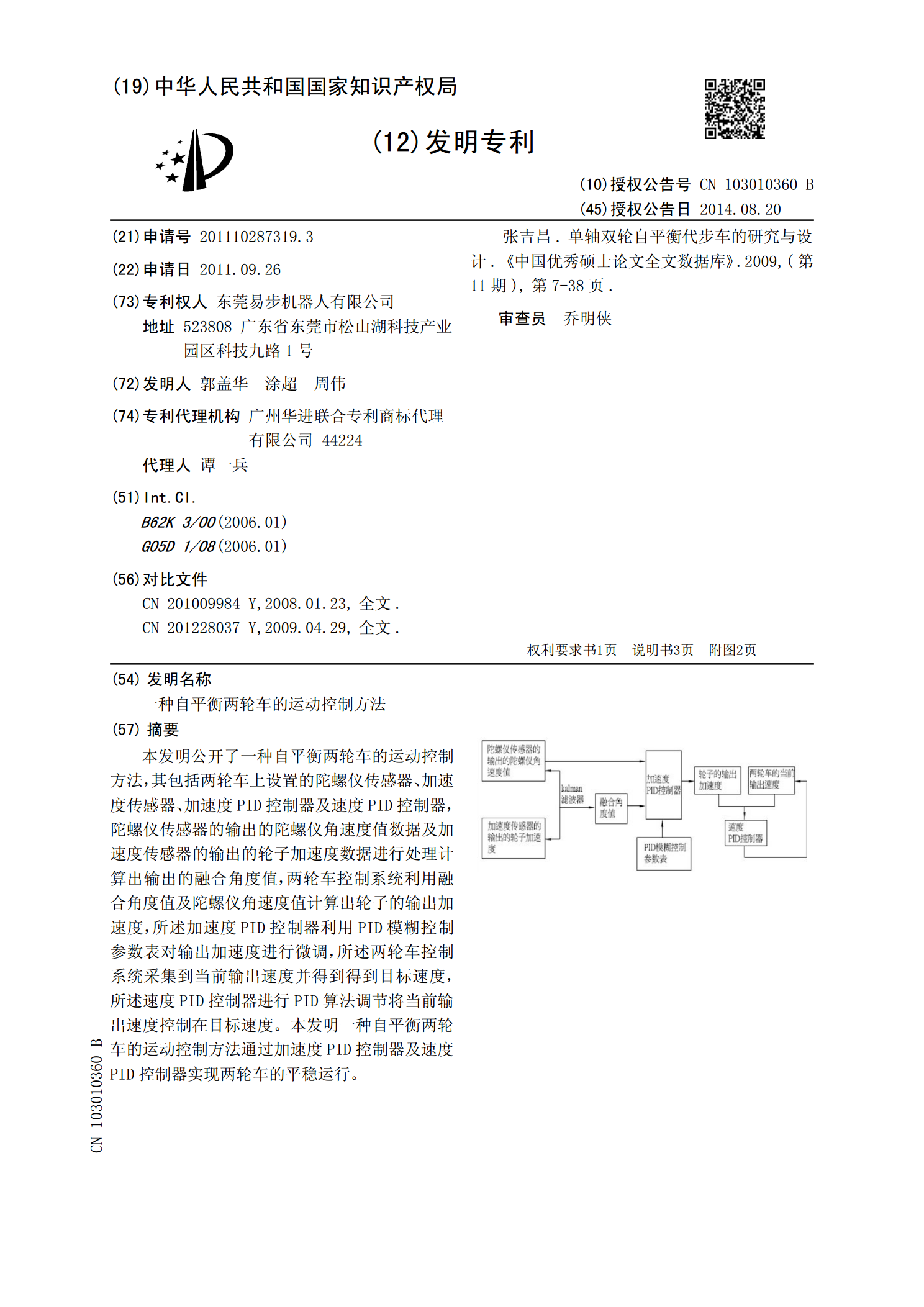
本发明公开了一种自平衡两轮车的运动控制方法,其包括两轮车上设置的陀螺仪传感器、加速度传感器、加速度PID控制器及速度PID控制器,陀螺仪传感器的输出的陀螺仪角速度值数据及加速度传感器的输出的轮子加速度数据进行处理计算出输出的融合角度值,两轮车控制系统利用融合角度值及陀螺仪角速度值计算出轮子的输出加速度,所述加速度PID控制器利用PID模糊控制参数表对输出加速度进行微调,所述两轮车控制系统采集到当前输出速度并得到得到目标速度,所述速度PID控制器进行PID算法调节将当前输出速度控制在目标速度。本发明一种自平

基于卡尔曼滤波的两轮自平衡车姿态检测方法.docx
基于卡尔曼滤波的两轮自平衡车姿态检测方法摘要:本论文基于卡尔曼滤波算法研究了一种用于两轮自平衡车姿态检测的方法。首先,介绍了两轮自平衡车的原理和姿态检测的重要性。然后,详细介绍了卡尔曼滤波算法的原理和应用。接下来,提出了基于卡尔曼滤波的两轮自平衡车姿态检测方法,并给出了算法的具体实现步骤和流程。最后,通过实验验证了该算法的有效性,并进行了数据分析和讨论。实验结果表明,基于卡尔曼滤波的两轮自平衡车姿态检测方法具有较高的准确性和稳定性。关键词:两轮自平衡车、姿态检测、卡尔曼滤波、准确性、稳定性1.引言两轮自平

一种两轮智能平衡车及其控制方法.pdf
本发明涉及一种两轮智能平衡车及其控制方法,包括主程序和定时中断程序,在主程序开始之后,执行定时中断程序,进入定时中断程序时,主程序暂停,定时中断程序结束后返回主程序暂停的位置;定时中断程序包括以下步骤:获取与平衡车两个车轮分别相连的两个电机的定子电压和绕组电流,分别计算获得电机转矩,通过电机转矩、磁链调节器以及矢量表生成两个电机所需要12路的PWM,进行直接转矩控制,输出到电机,完成平衡车的控制。本发明中采用直接转矩控制,输入量只需要定子电压和绕组电流,无需位置传感器,节约了成本并且稳定了性能;输出量是一

一种智能两轮自平衡电动车.pdf
本发明公开了一种智能两轮自平衡电动车,包括自平衡车体,自平衡车体包括车架、控制芯片和驱动装置,控制芯片与驱动装置连接,还包括设有控制按键的遥控器,遥控器通过第一无线通信模块与自平衡车体无线连接、用以控制自平衡车体的行驶;第一无线通信模块包括第一无线发射器和与第一无线发射器相配合使用的N个第一无线接收器,第一无线发射器安装于遥控器上、并与遥控器内的处理芯片连接,第一无线接收器安装于车架前端的中间位置上、并与控制芯片连接,其中N是≥2的整数。本结构的两轮自平衡电动车即使在没有驾驶者在自平衡车上进行操控的情况下