
座椅型重心手控转向脚踏式两轮自平衡智能车.pdf

努力****爱敏


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

座椅型重心手控转向脚踏式两轮自平衡智能车.pdf
本发明公开了一种座椅型重心手控转向脚踏式两轮自平衡智能车,包括座椅式车体以及设置于车体上的前后控制机构、转向控制机构和控制系统;其中,所述前后控制机构设置于座椅式车体的扶手处;所述转向控制机构设置于座椅式车体的脚踏处,所述控制系统与转向控制机构相连接,并检测由前后控制机构产生的重心倾斜信号。本发明使得操控智能车前进和后退时提供的前倾后倾信号不再是由身体的前倾后仰来实现,而是通过手控来调节;而对于方向的控制,不再像现有的操控模式,通过摆杆进行转向,而是通过脚踏给出转向信号;并且,人们在控制智能车时真正地“坐

一种双控型两轮自平衡智能车.pdf
一种双控型两轮自平衡智能车,其包括有机械结构和安装于该机械结构上的操控系统,该操控系统以只通过双手进行的手控操作方式或者只通过身体的协调活动进行的体控操作方式来控制智能车实现在竖直方向小倾角范围内的平稳运行;其中,机械结构包括车架和座椅式车体,操控系统包括操控方式切换开关、控制盒体、相互独立的手控部件和体控部件、核心控制芯片和驱动器。本发明实现了双重独立操控方式下两轮自平衡智能车的直立、前进、后退以及转弯功能,具有操控方便舒适、稳定性好和行进稳定灵活的优点,适合正常人士以及双手正常但身体活动障碍和双手活动

自平衡两轮车转向装置.pdf
本发明公开了一种自平衡两轮车转向装置,用于为自平衡两轮车提供转向,包括:液压管道组件,其设置于该车体内,包括水平管道以及分别位于该水平管道两侧、并且与该水平管道相连通的两个竖直管道,该水平管道和两个竖直管道内填充有液体,并且该两个竖直管道的端部均设置有可上下活动的活塞,使得该液体处于密闭状态,该两个活塞分别设置于该两个踏板下方;位移传感器组件,包括运动元件和运动信号接收元件,其中,该运动元件可水平活动地设置于该水平管道内;转向控制系统,用于接收该位置信号,并根据该位置信号,控制该自平衡两轮车的转向。本发明
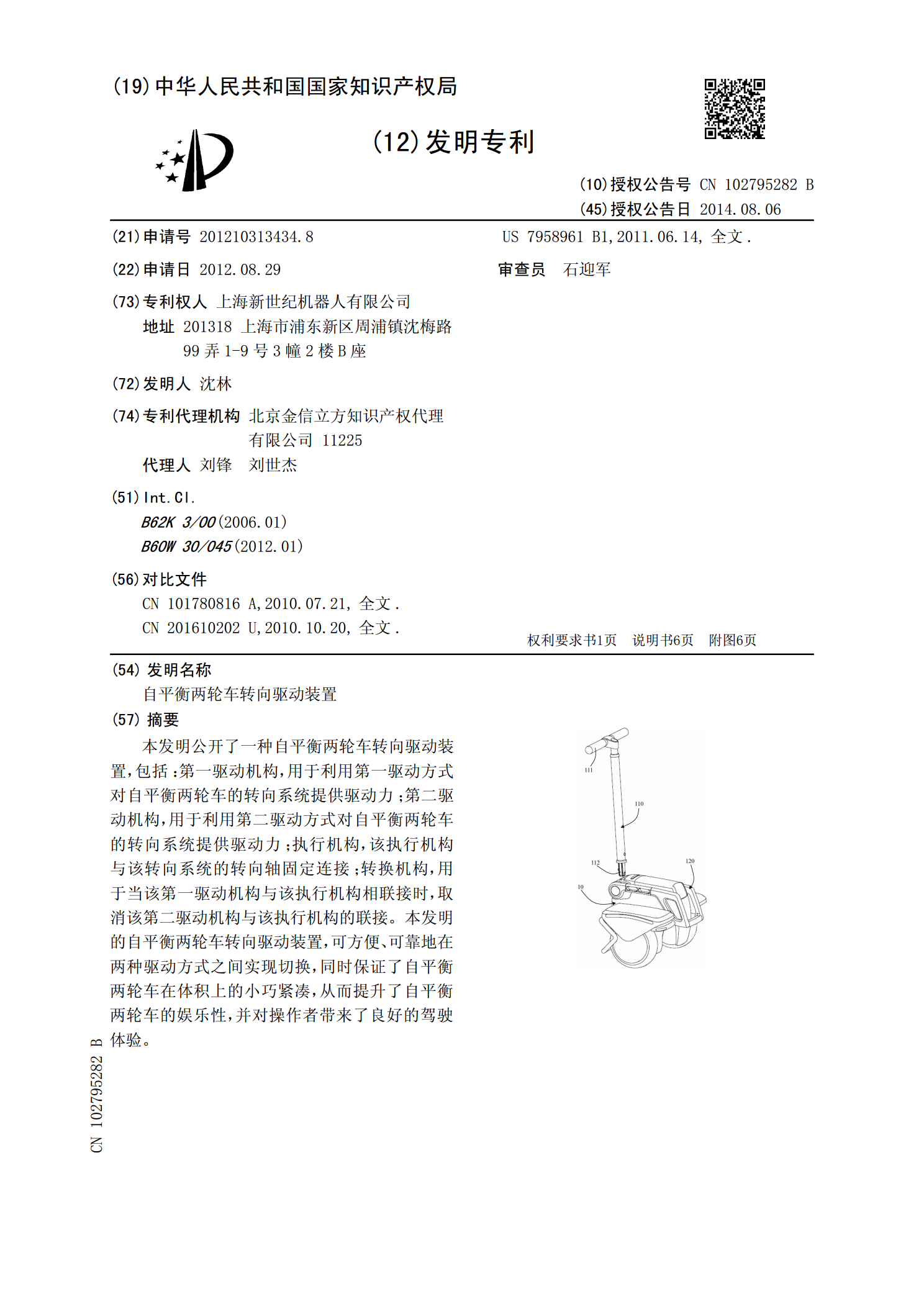
自平衡两轮车转向驱动装置.pdf
本发明公开了一种自平衡两轮车转向驱动装置,包括:第一驱动机构,用于利用第一驱动方式对自平衡两轮车的转向系统提供驱动力;第二驱动机构,用于利用第二驱动方式对自平衡两轮车的转向系统提供驱动力;执行机构,该执行机构与该转向系统的转向轴固定连接;转换机构,用于当该第一驱动机构与该执行机构相联接时,取消该第二驱动机构与该执行机构的联接。本发明的自平衡两轮车转向驱动装置,可方便、可靠地在两种驱动方式之间实现切换,同时保证了自平衡两轮车在体积上的小巧紧凑,从而提升了自平衡两轮车的娱乐性,并对操作者带来了良好的驾驶体验。
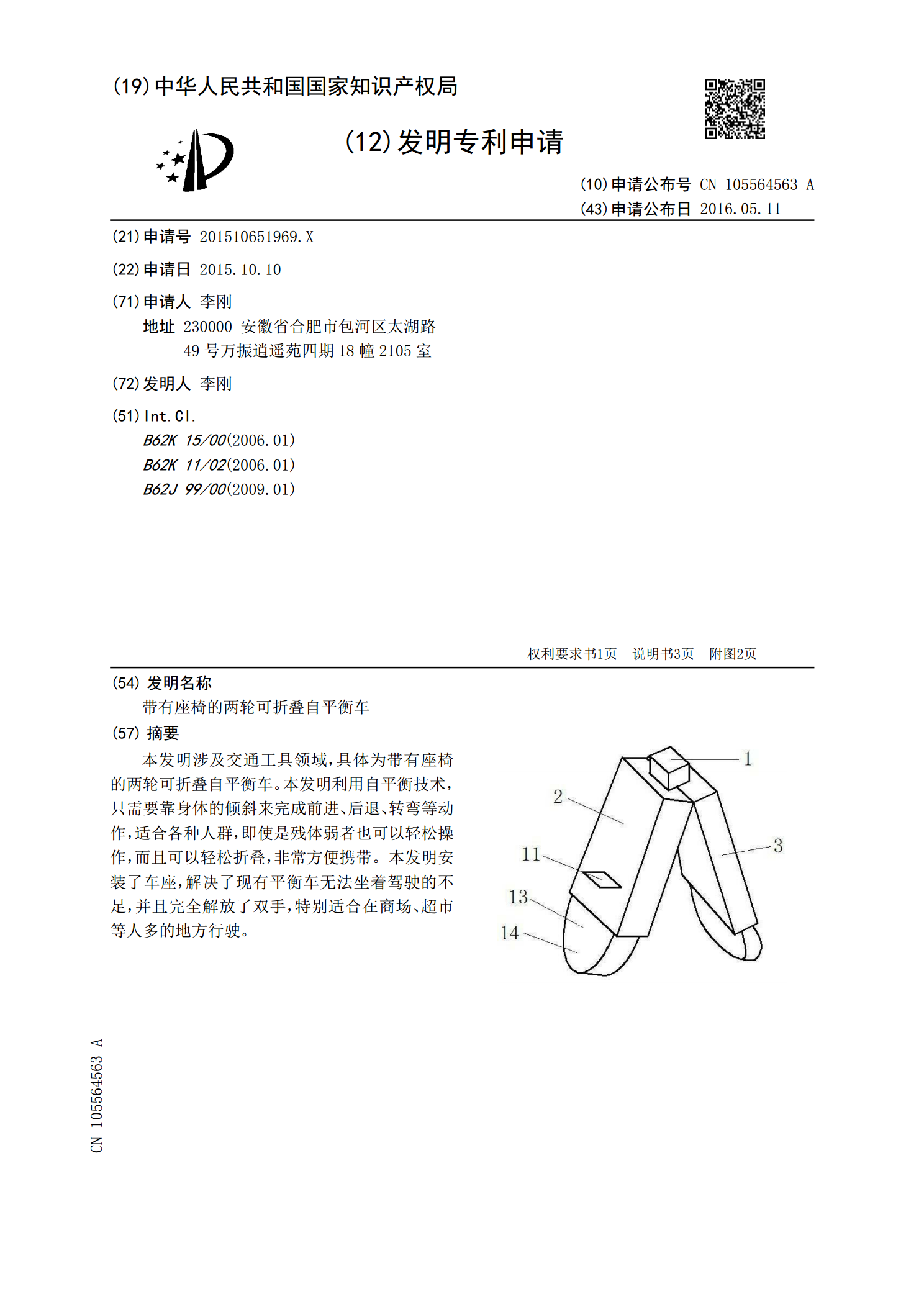
带有座椅的两轮可折叠自平衡车.pdf
本发明涉及交通工具领域,具体为带有座椅的两轮可折叠自平衡车。本发明利用自平衡技术,只需要靠身体的倾斜来完成前进、后退、转弯等动作,适合各种人群,即使是残体弱者也可以轻松操作,而且可以轻松折叠,非常方便携带。本发明安装了车座,解决了现有平衡车无法坐着驾驶的不足,并且完全解放了双手,特别适合在商场、超市等人多的地方行驶。