
一种轮腿式机器人底盘悬挂装置.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮腿式机器人底盘悬挂装置.pdf
本发明涉及一种轮腿式机器人底盘悬挂装置。包括轮式移动驱动机构、轮式移动机构、腿式行走机构、腿式行走驱动机构、转向机构;轮式移动机构和腿式行走机构共用三对车轮,每个车轮通过安装在其上的轮胎转向座分别与轮式移动机构、腿式行走机构相连接,每个车轮的轮毂上侧安装有角度传感器,且每相邻两个轮毂安装的角度传感器相位相差180°;轮式移动驱动机构和腿式行走机构的驱动机构相互独立且分别安装在轮腿式机器人底盘的两端。同现有技术相比:用一套悬挂装置实现腿式和轮式机构的结合,兼具两者的优点,越障性、适应性、稳定性好,有减震作用

一种具有悬挂系统的轮腿式六足机器人.pdf
本发明公开一种具有悬挂系统的轮腿式六足机器人,包括机体与六条单腿结构;六条单腿机构在机体周向上均布。单腿结构具有跟关节、髋关节与膝关节;其中,跟关节与机体间相连,通过电机驱动绕竖直Z轴转动;髋关节与跟关节间通过悬挂系统相连,该悬挂系统仅仅使用一个避震器就可以实现两个方向的减震缓冲效果。髋关节与膝关节均通过电机直驱,绕水平Y轴转动,两者间通过大腿结构相连;膝关节与小腿结构末端相连,小腿结构末端还安装有轮式移动机构;小腿前端安装有足端缓冲机构。本发明具有悬挂系统的轮腿式六足机器人,可以保证机体内部环境在运动过
一种拉簧式悬挂机器人底盘.pdf
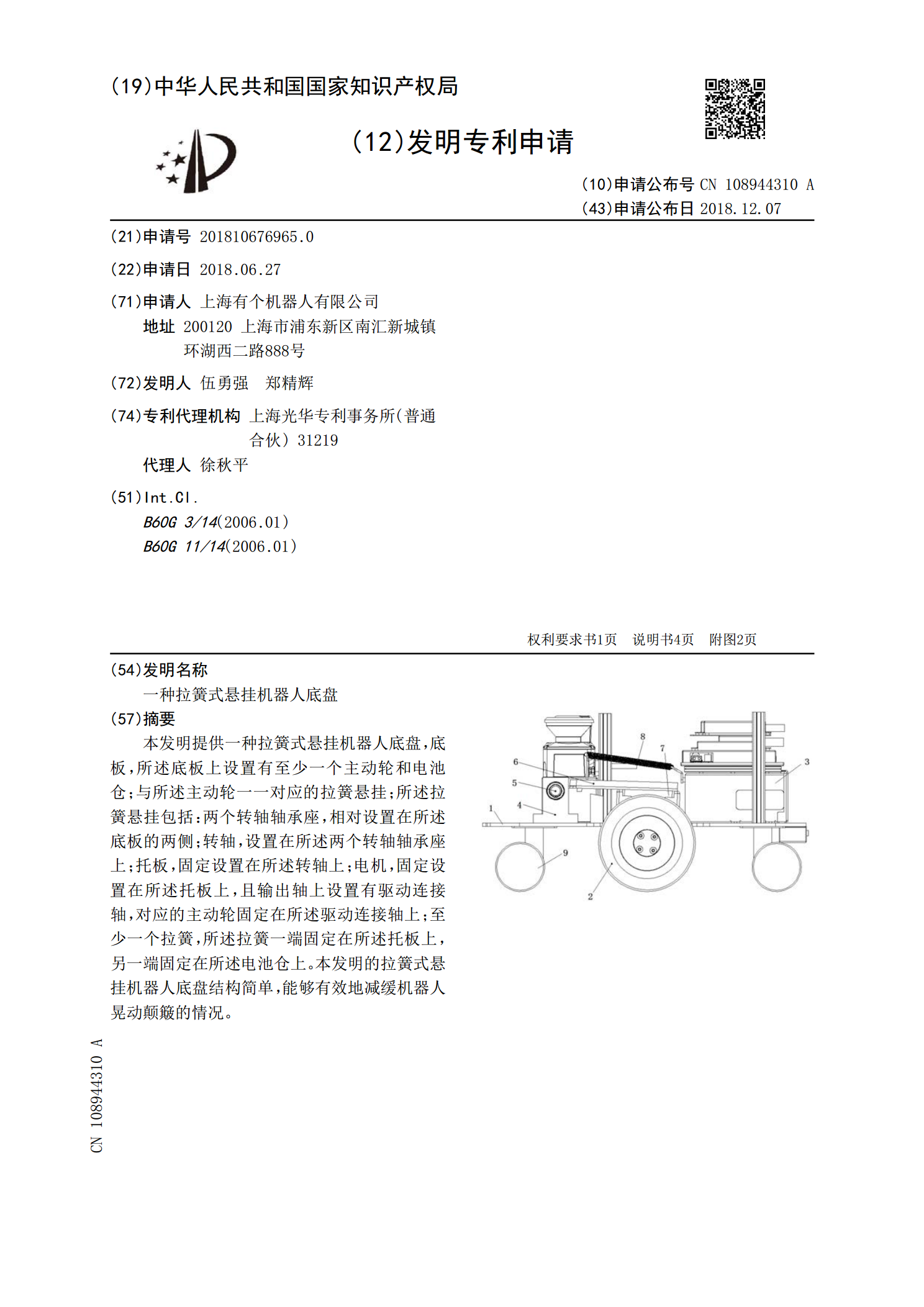
本发明提供一种拉簧式悬挂机器人底盘,底板,所述底板上设置有至少一个主动轮和电池仓;与所述主动轮一一对应的拉簧悬挂;所述拉簧悬挂包括:两个转轴轴承座,相对设置在所述底板的两侧;转轴,设置在所述两个转轴轴承座上;托板,固定设置在所述转轴上;电机,固定设置在所述托板上,且输出轴上设置有驱动连接轴,对应的主动轮固定在所述驱动连接轴上;至少一个拉簧,所述拉簧一端固定在所述托板上,另一端固定在所述电池仓上。本发明的拉簧式悬挂机器人底盘结构简单,能够有效地减缓机器人晃动颠簸的情况。

轻型悬挂式轨道机器人底盘.pdf
本发明公开了一种轻型悬挂式轨道机器人底盘,包括驱动组件、侧板组件、导向支架组件、装甲壳、电路板组件、锁紧杆组件和中心安装板;两个侧板组件的底部分别对称固定于中心安装板的两端,两个驱动组件分别固定于两个侧板组件外侧的中央位置,两个导向支架组件分别对称固定于中心安装板的顶面同时平行于中心安装板的短边且与两个侧板组件间留有空隙;两个电路板组件分别开口向内固定于两个导向支架组件的内侧,两个装甲壳分别固定于两个导向支架组件的外侧并包裹住两个导向支架组件;两个锁紧杆组件平行设置,用于连接锁紧两个侧板组件。本发明结构轻

一种悬挂式的机器人底盘结构.pdf
本发明公开了一种悬挂式的机器人底盘结构,包括第一底盘、第二底盘、第三底盘和支柱,所述第一底盘和第三底盘之间通过支柱连接,所述第一底盘的左右两端分别设有驱动轮,且驱动轮通过转轴与传动系统连接,所述第一底盘的前后两端分别设有万向从动轮,所述第一底盘的上部两端分别设有第二底盘,且第二底盘之间通过弹簧钢连接,所述第二底盘的两端分别设有直线轴承,且直线轴承的顶端设有尼龙轴套,所述尼龙轴套内设有导向轴,且导向轴上套有弹簧,该发明使机器人运动更加敏捷,速度更快,运动更加平稳,适用性强。