
一种具有悬挂系统的轮腿式六足机器人.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有悬挂系统的轮腿式六足机器人.pdf
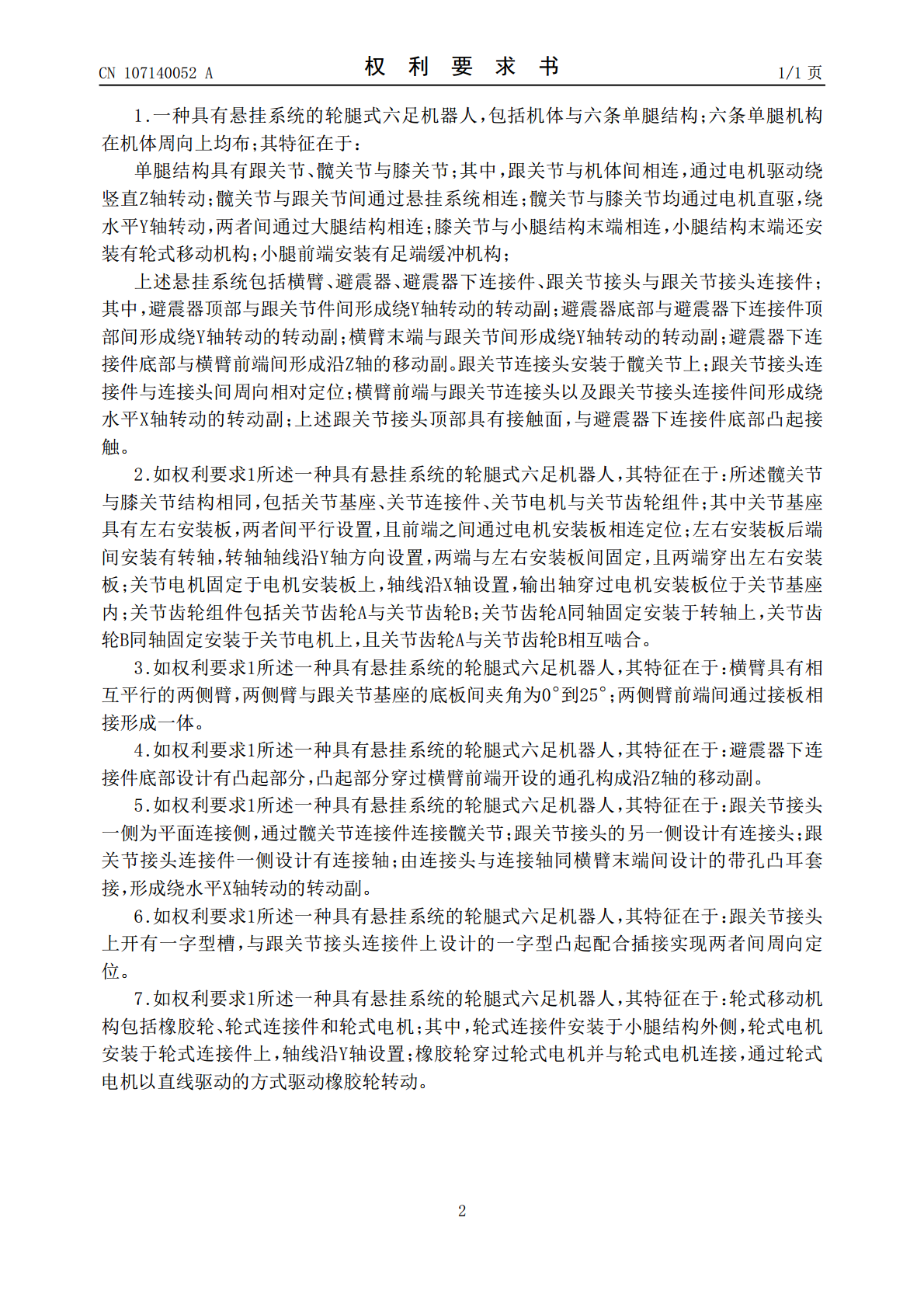
本发明公开一种具有悬挂系统的轮腿式六足机器人,包括机体与六条单腿结构;六条单腿机构在机体周向上均布。单腿结构具有跟关节、髋关节与膝关节;其中,跟关节与机体间相连,通过电机驱动绕竖直Z轴转动;髋关节与跟关节间通过悬挂系统相连,该悬挂系统仅仅使用一个避震器就可以实现两个方向的减震缓冲效果。髋关节与膝关节均通过电机直驱,绕水平Y轴转动,两者间通过大腿结构相连;膝关节与小腿结构末端相连,小腿结构末端还安装有轮式移动机构;小腿前端安装有足端缓冲机构。本发明具有悬挂系统的轮腿式六足机器人,可以保证机体内部环境在运动过
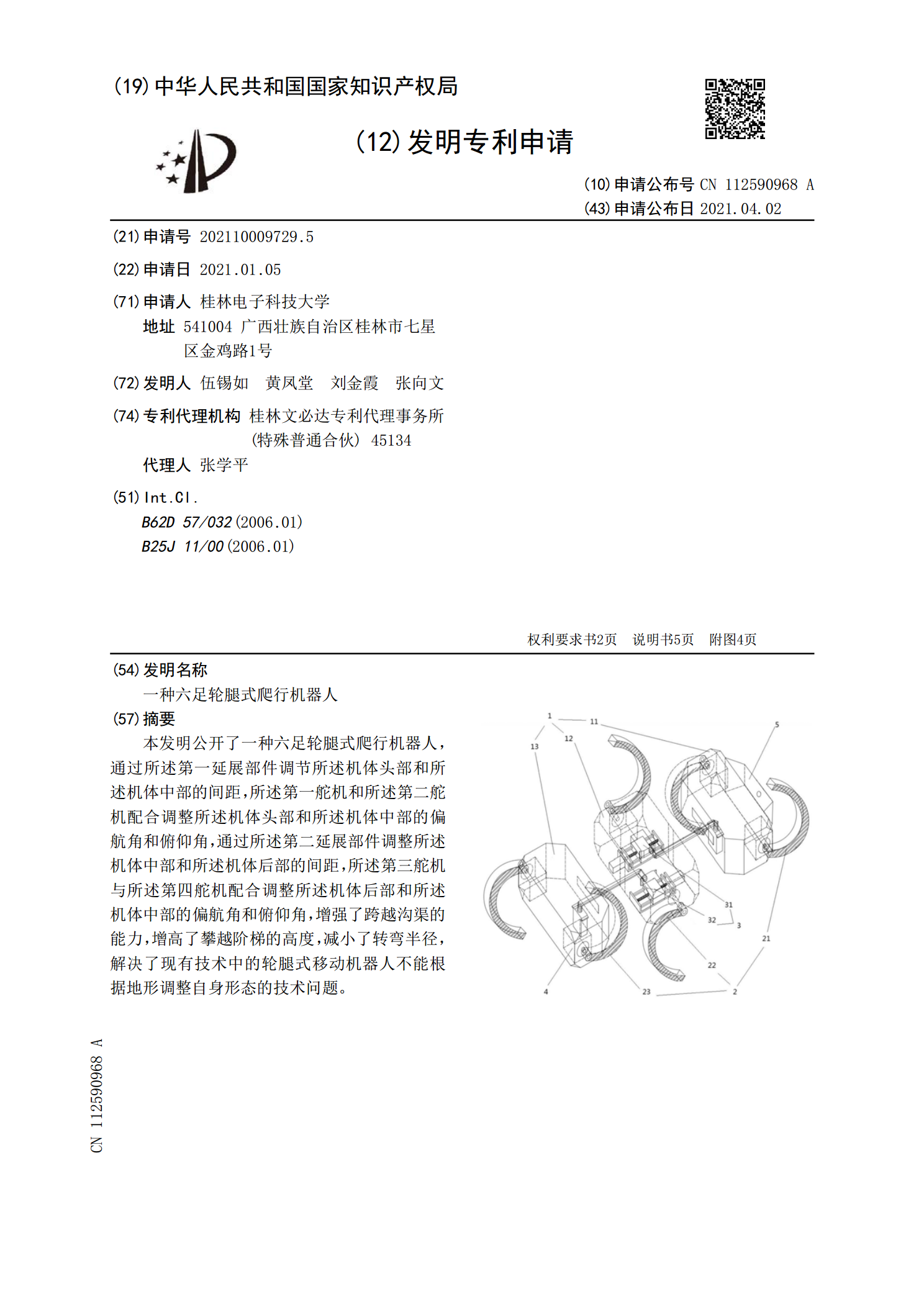
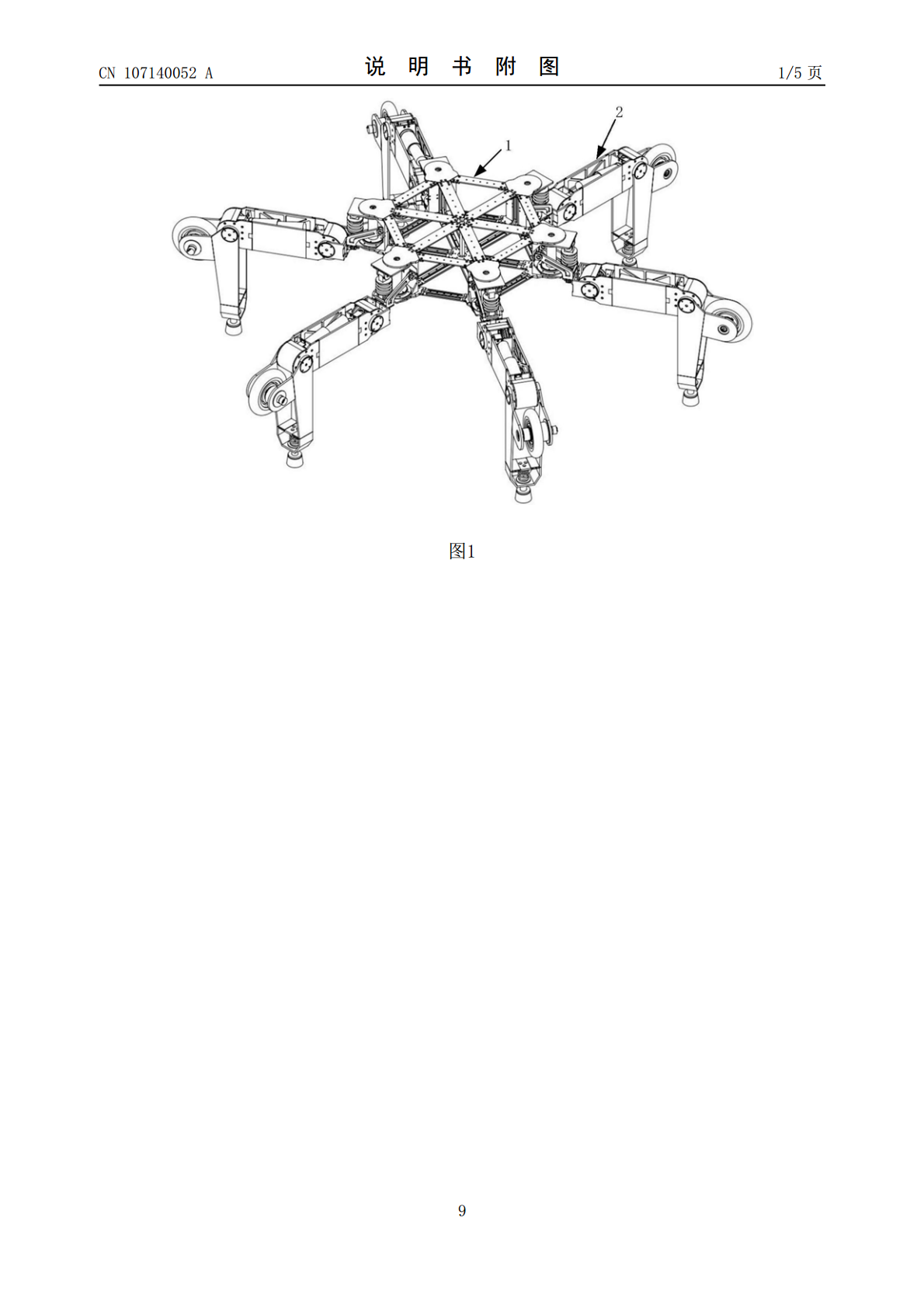
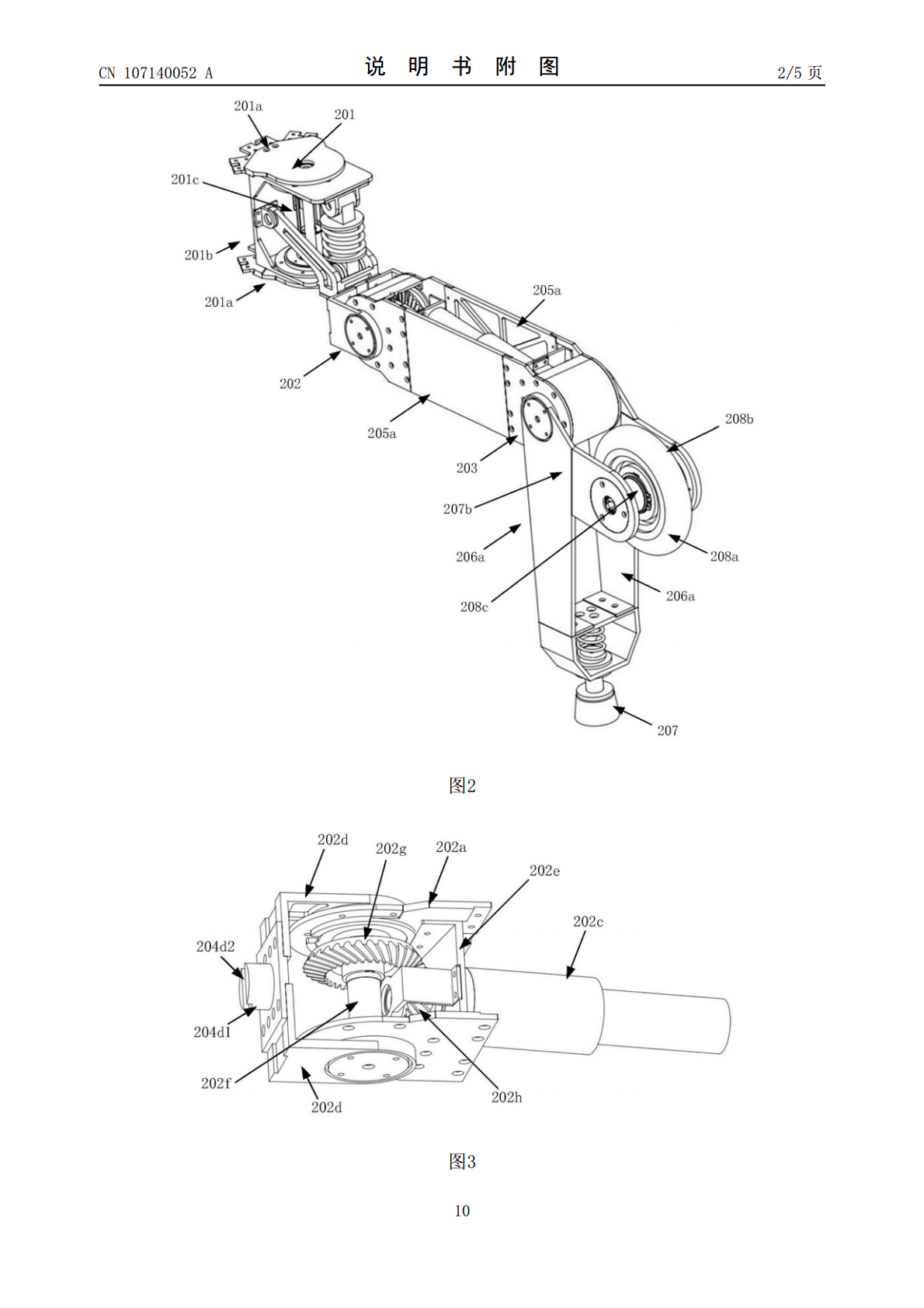
一种六足轮腿式爬行机器人.pdf
本发明公开了一种六足轮腿式爬行机器人,通过所述第一延展部件调节所述机体头部和所述机体中部的间距,所述第一舵机和所述第二舵机配合调整所述机体头部和所述机体中部的偏航角和俯仰角,通过所述第二延展部件调整所述机体中部和所述机体后部的间距,所述第三舵机与所述第四舵机配合调整所述机体后部和所述机体中部的偏航角和俯仰角,增强了跨越沟渠的能力,增高了攀越阶梯的高度,减小了转弯半径,解决了现有技术中的轮腿式移动机器人不能根据地形调整自身形态的技术问题。
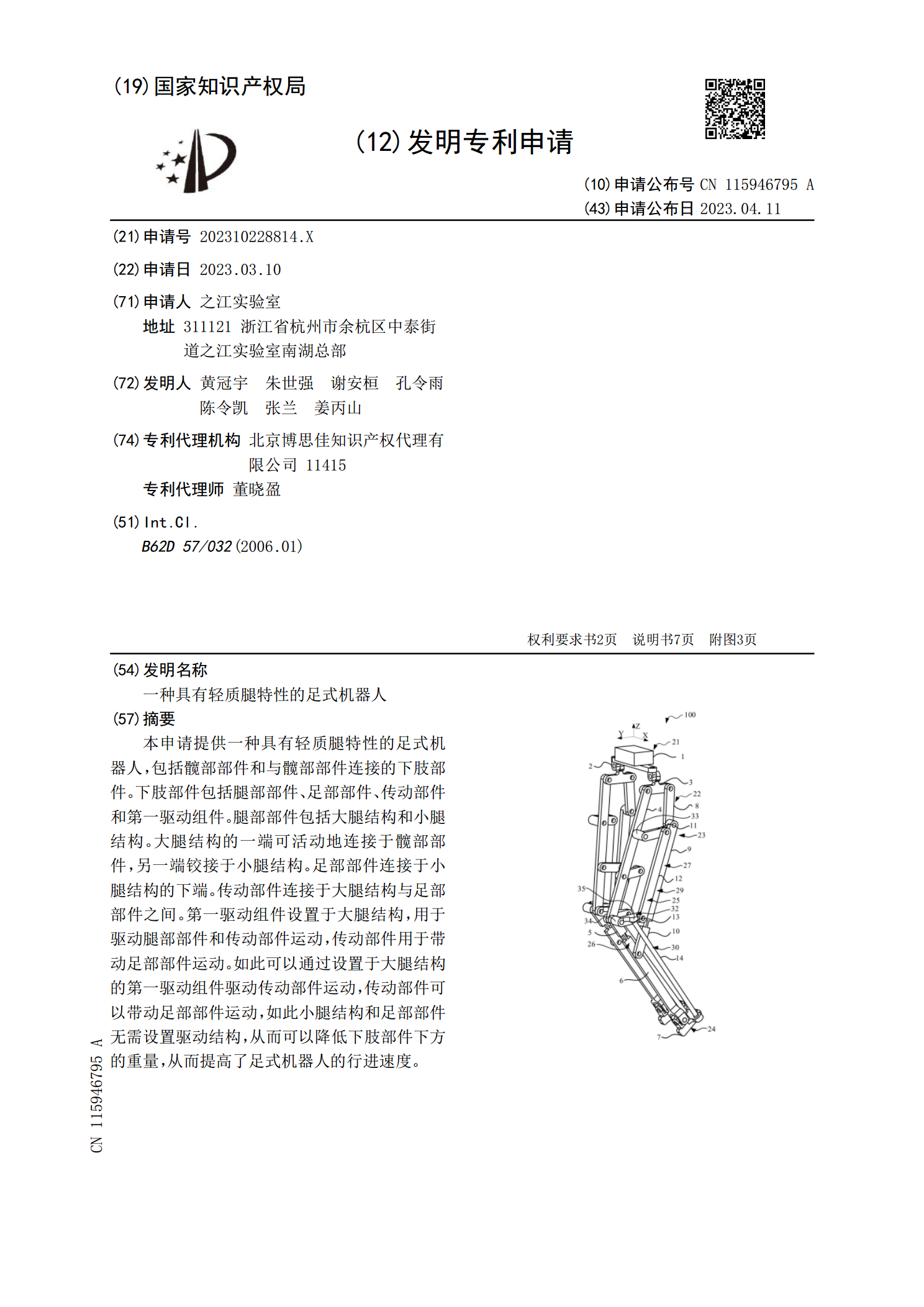
一种具有轻质腿特性的足式机器人.pdf
本申请提供一种具有轻质腿特性的足式机器人,包括髋部部件和与髋部部件连接的下肢部件。下肢部件包括腿部部件、足部部件、传动部件和第一驱动组件。腿部部件包括大腿结构和小腿结构。大腿结构的一端可活动地连接于髋部部件,另一端铰接于小腿结构。足部部件连接于小腿结构的下端。传动部件连接于大腿结构与足部部件之间。第一驱动组件设置于大腿结构,用于驱动腿部部件和传动部件运动,传动部件用于带动足部部件运动。如此可以通过设置于大腿结构的第一驱动组件驱动传动部件运动,传动部件可以带动足部部件运动,如此小腿结构和足部部件无需设置驱动
一种六足轮腿变换式自主机器人.pdf
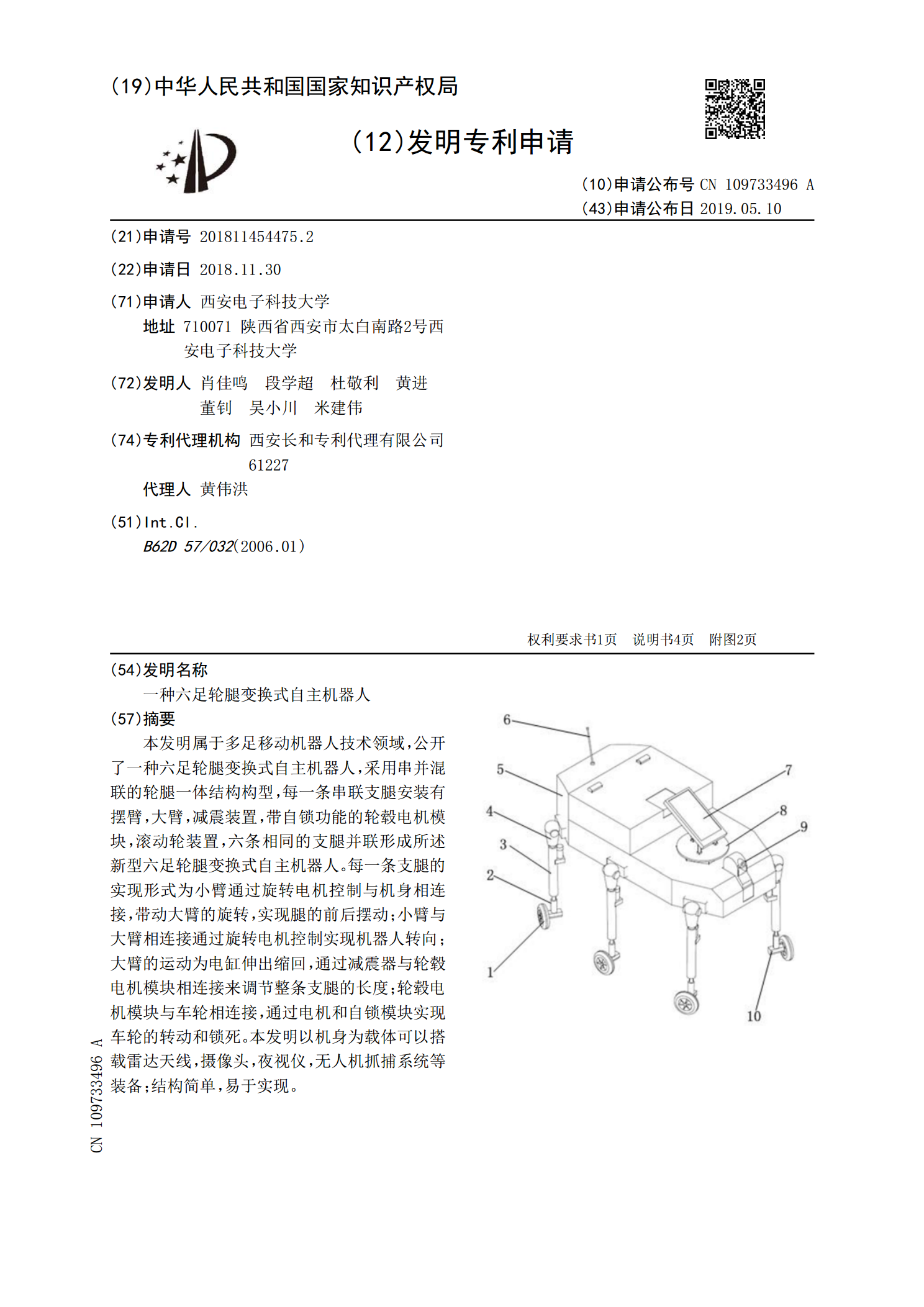
本发明属于多足移动机器人技术领域,公开了一种六足轮腿变换式自主机器人,采用串并混联的轮腿一体结构构型,每一条串联支腿安装有摆臂,大臂,减震装置,带自锁功能的轮毂电机模块,滚动轮装置,六条相同的支腿并联形成所述新型六足轮腿变换式自主机器人。每一条支腿的实现形式为小臂通过旋转电机控制与机身相连接,带动大臂的旋转,实现腿的前后摆动;小臂与大臂相连接通过旋转电机控制实现机器人转向;大臂的运动为电缸伸出缩回,通过减震器与轮毂电机模块相连接来调节整条支腿的长度;轮毂电机模块与车轮相连接,通过电机和自锁模块实现车轮的转

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式