
一种轮履复合径向可调式管道机器人.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮履复合径向可调式管道机器人.pdf
本发明公开了一种轮履复合径向可调式管道机器人。仿生式管道机器人移动速度慢且波动大,履带式管道机器人结构复杂,车型式管道机器人不能进入垂直管道。本发明包括多个轮履复合机构,每个轮履复合机构包括主壳体、径向调节机构、履带驱动行走机构和轮式支撑机构;两块安装侧板通过驱动带轮安装轴和从动带轮安装轴连接;驱动带轮安装轴上固定有驱动带轮,从动带轮安装轴上固定有从动带轮,驱动带轮与从动带轮通过履带连接;安装侧板通过从动摆杆与主壳体铰接;轮式支撑机构包括底板和滑轮;底板的两端均通过从动摆杆与主壳体铰接,一端的从动摆杆与一
一种轮履复合式管道机器人.pdf
本发明公开了一种轮履复合式管道机器人,包括履带式行进驱动装置、两个从动轮装置和控制器,行进驱动装置上左右对称的设置两个L型支架,两个L型支架的一端固定在行进驱动装置上,另一端竖直向下,两个从动轮装置分别安装在两个L型支架上;从动轮装置包括从动轮,驱动从动轮升降的升降机构和驱动从动轮转向的转向机构;升降机构包括第一电机、第一主动齿轮、第一从动齿轮、丝杆和导杆;转向机构包括第二电机、第二主动齿轮、第二从动齿轮和转轴;从动轮上设置压力传感器;控制器与行进驱动装置、第一电机、第二电机以及压力传感器连接。本发明的轮
一种可快速转换形态的轮履复合式机器人.pdf
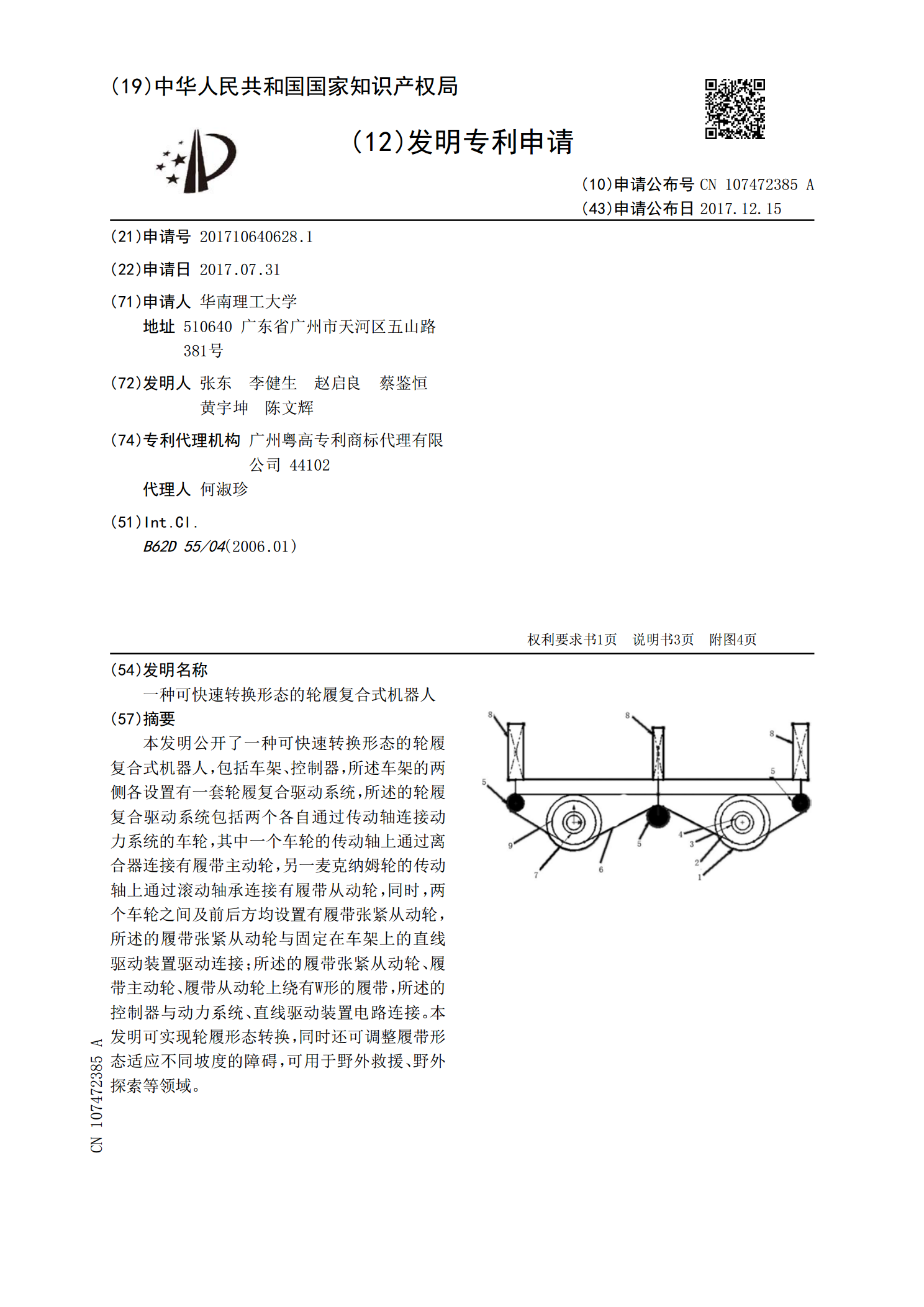
本发明公开了一种可快速转换形态的轮履复合式机器人,包括车架、控制器,所述车架的两侧各设置有一套轮履复合驱动系统,所述的轮履复合驱动系统包括两个各自通过传动轴连接动力系统的车轮,其中一个车轮的传动轴上通过离合器连接有履带主动轮,另一麦克纳姆轮的传动轴上通过滚动轴承连接有履带从动轮,同时,两个车轮之间及前后方均设置有履带张紧从动轮,所述的履带张紧从动轮与固定在车架上的直线驱动装置驱动连接;所述的履带张紧从动轮、履带主动轮、履带从动轮上绕有W形的履带,所述的控制器与动力系统、直线驱动装置电路连接。本发明可实现轮

一种轮履复合移动探测机器人.pdf
本发明涉及一种轮履复合移动探测机器人,包括双目立体全景图像获取装置,控制器和轮履复合移动机器人,控制器包括自主导航控制系统,智能视频分析系统和微处理器,轮履复合移动探测机器人可根据双目全景立体图像获取装置所获得的路面情况自动控制其行驶方式,在路况较好的路面行驶时采用车轮,在路况较差的路面行驶时采用履带,实现行走机构用履带或用行走轮行驶的转换,且当使用履带行驶时,将主动行走轮和从动行走轮缩回在履带内;双目全景立体图像获取装置可将更直观、更立体的图像信息传送给控制中心,更清楚地了解现场情况,提供决策支持。
一种轮履复合式行走机器人.pdf
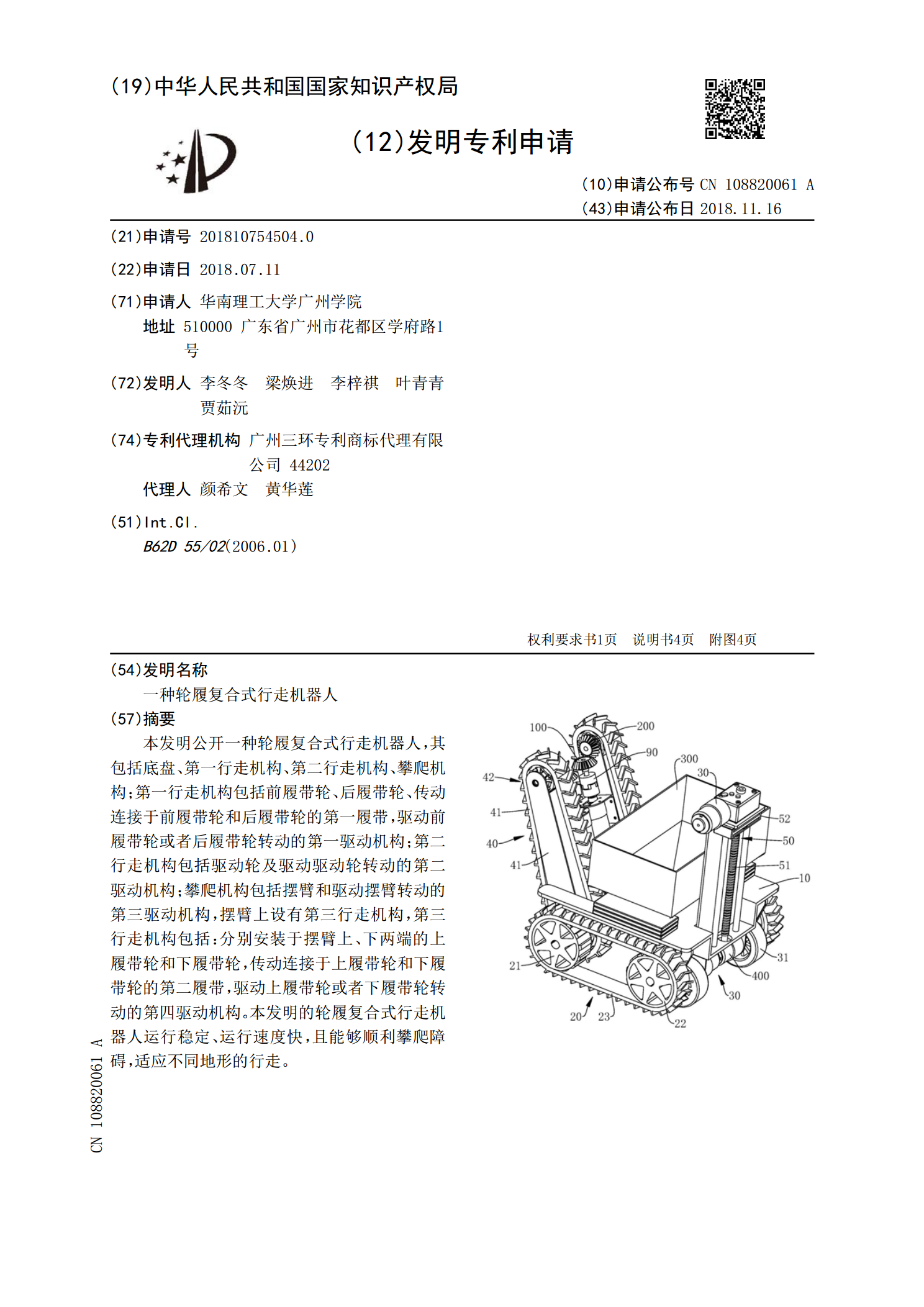
本发明公开一种轮履复合式行走机器人,其包括底盘、第一行走机构、第二行走机构、攀爬机构;第一行走机构包括前履带轮、后履带轮、传动连接于前履带轮和后履带轮的第一履带,驱动前履带轮或者后履带轮转动的第一驱动机构;第二行走机构包括驱动轮及驱动驱动轮转动的第二驱动机构;攀爬机构包括摆臂和驱动摆臂转动的第三驱动机构,摆臂上设有第三行走机构,第三行走机构包括:分别安装于摆臂上、下两端的上履带轮和下履带轮,传动连接于上履带轮和下履带轮的第二履带,驱动上履带轮或者下履带轮转动的第四驱动机构。本发明的轮履复合式行走机器人运行