
一种可快速转换形态的轮履复合式机器人.pdf

Ke****67

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可快速转换形态的轮履复合式机器人.pdf
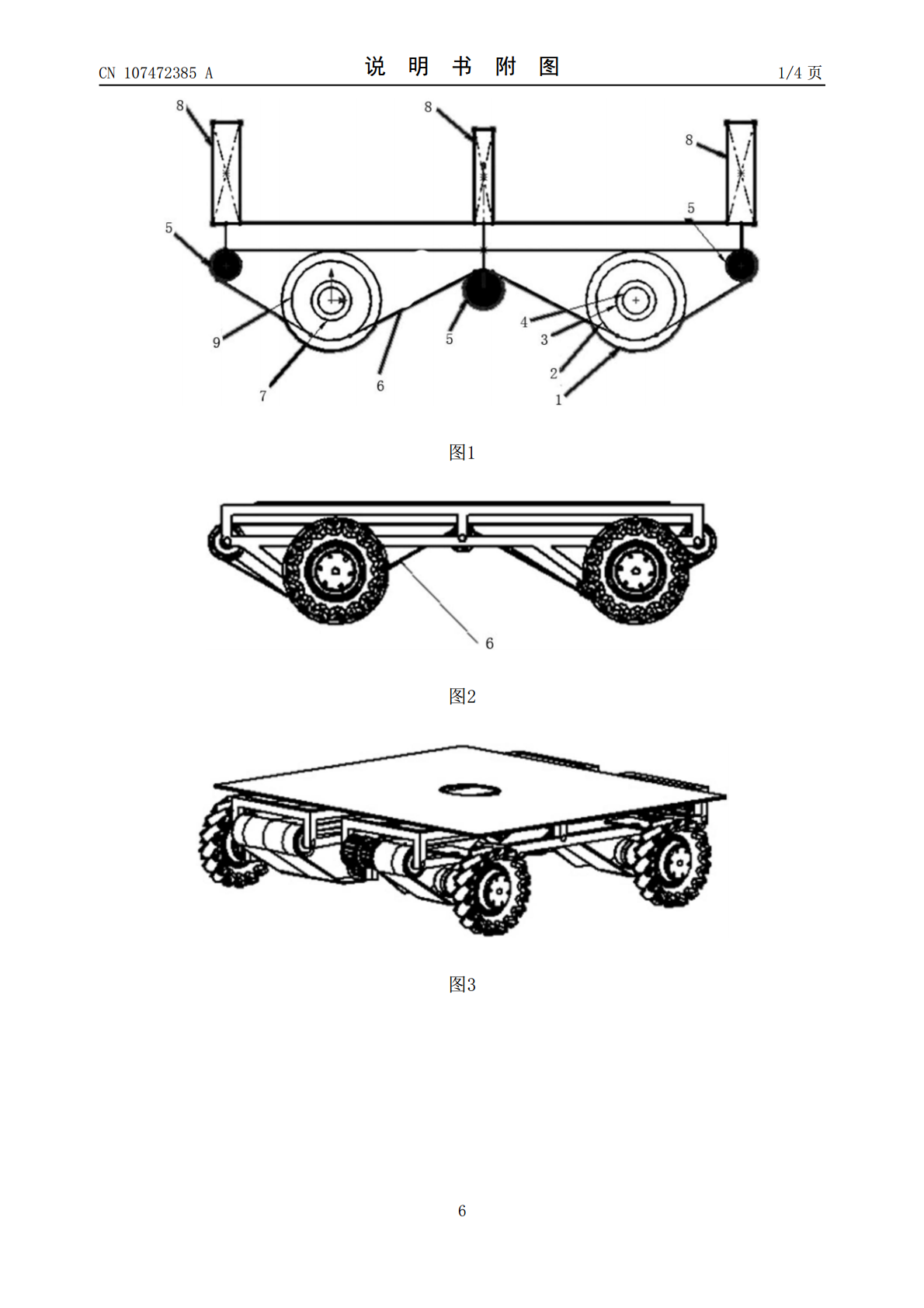
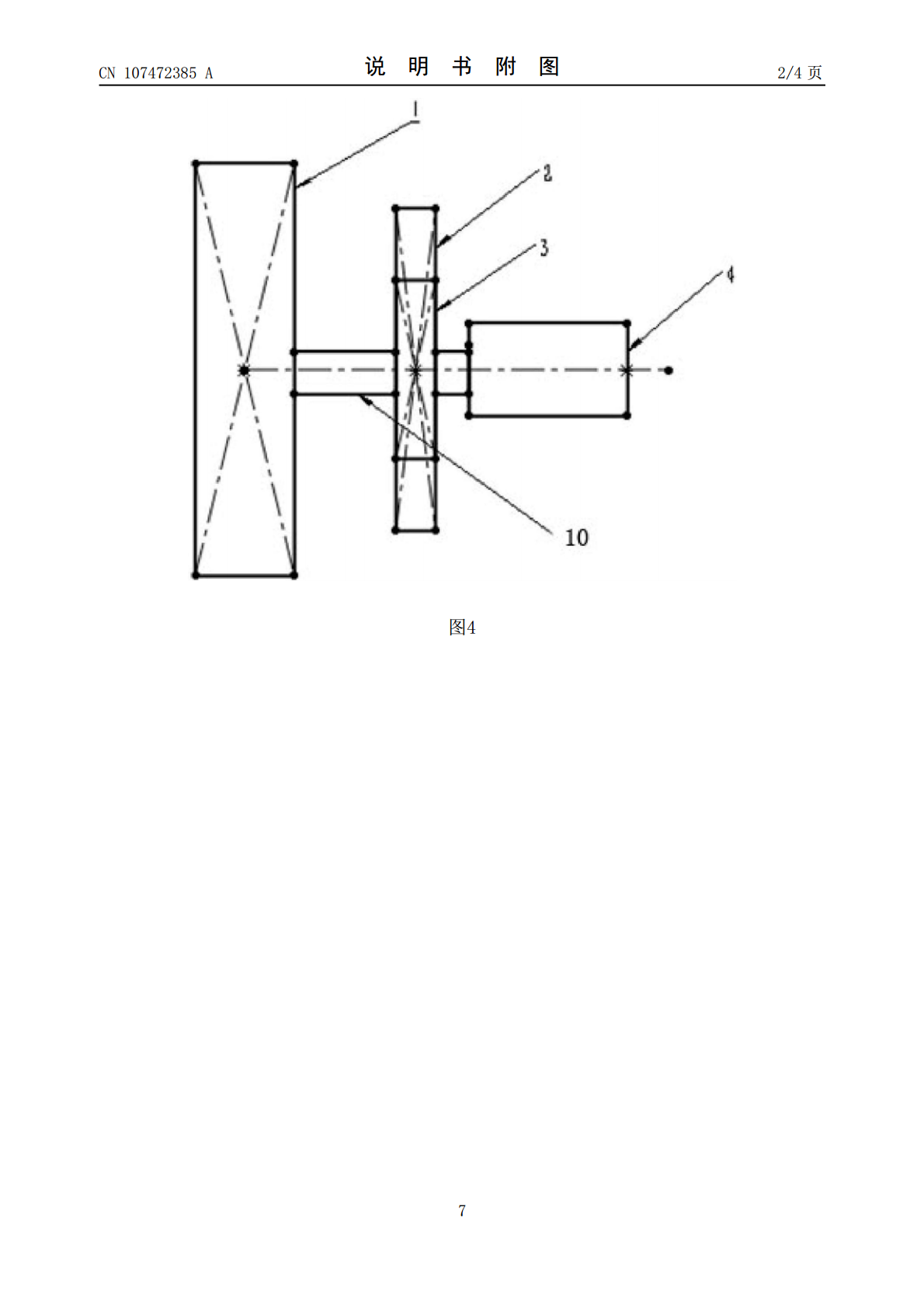
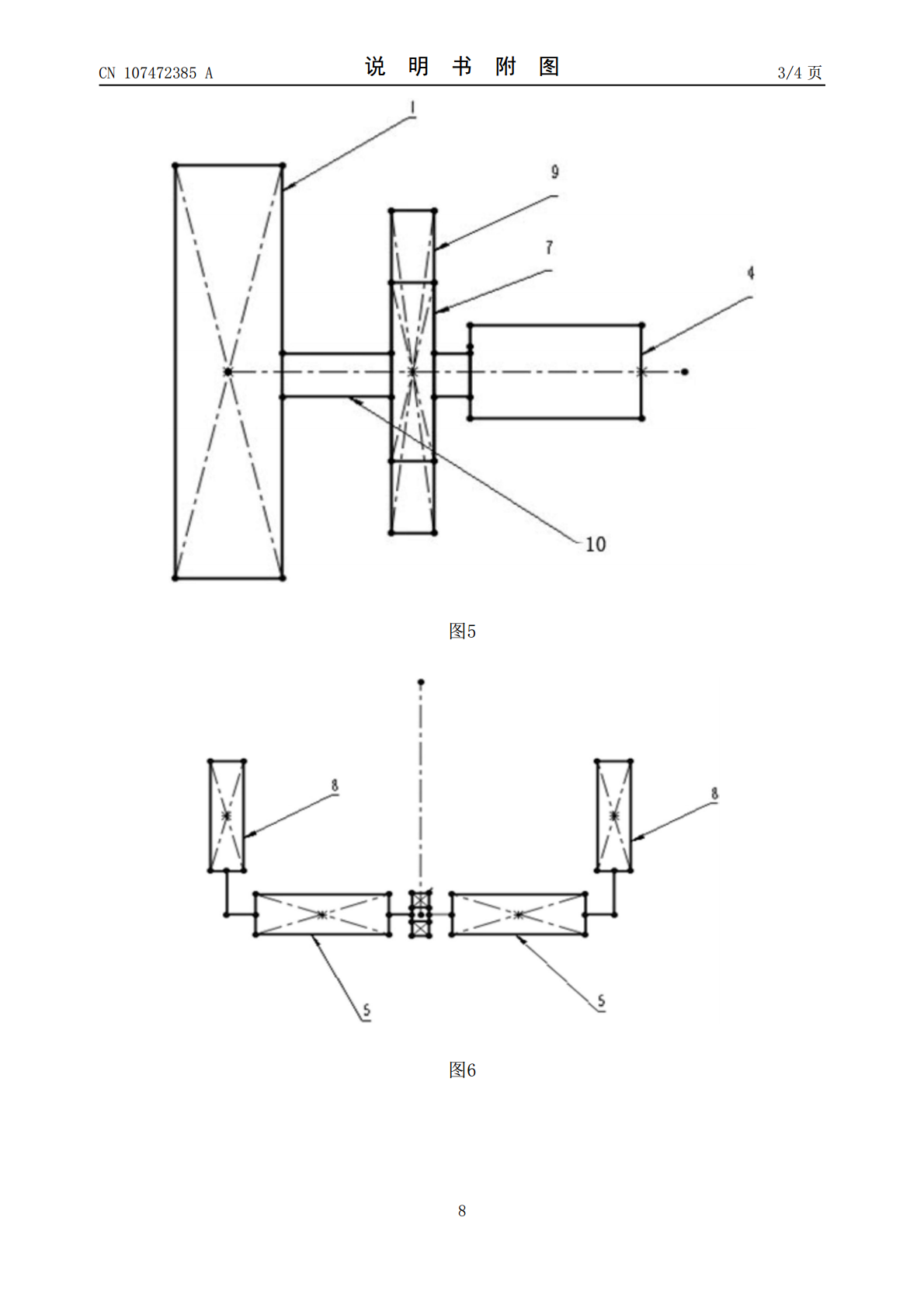
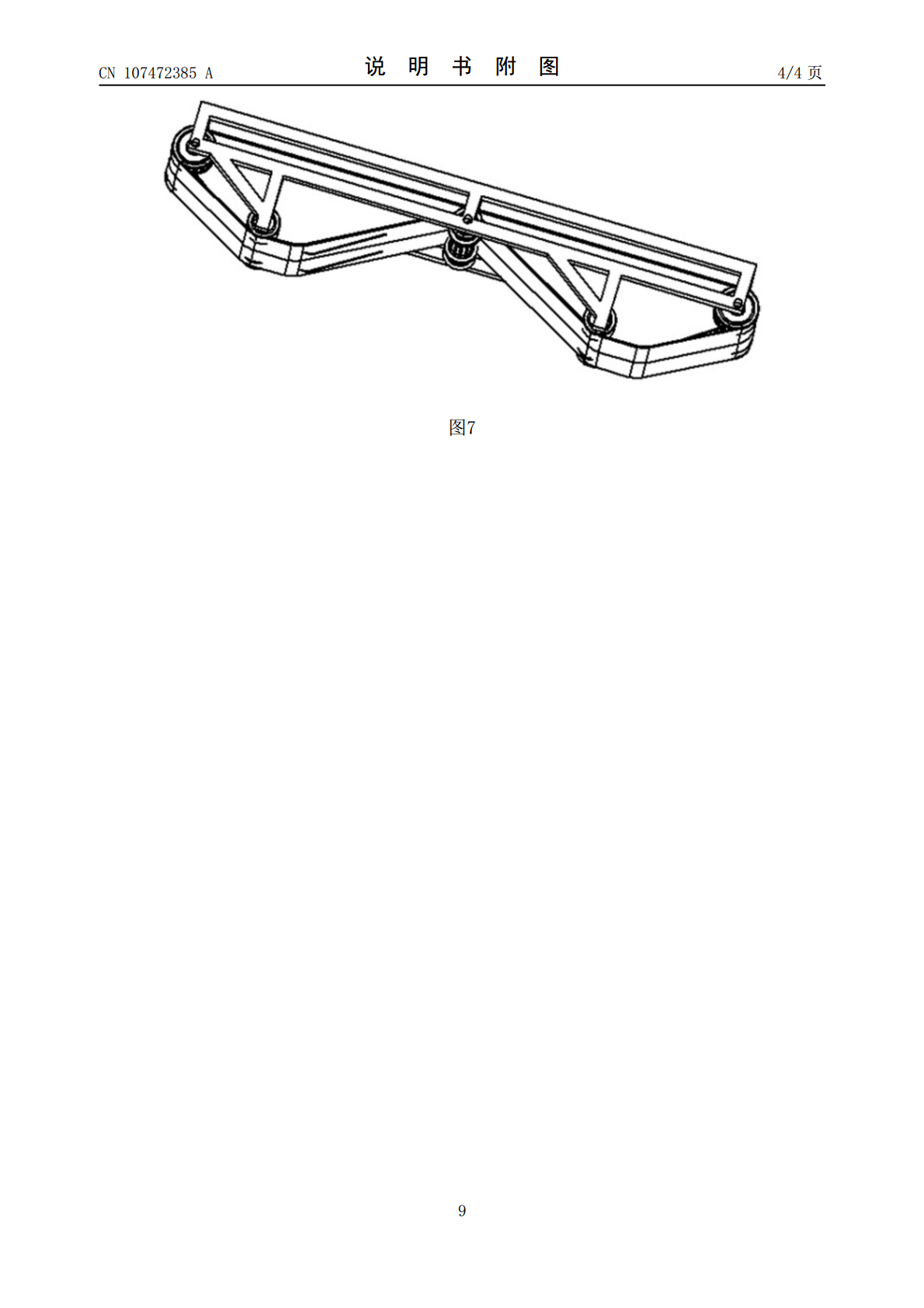
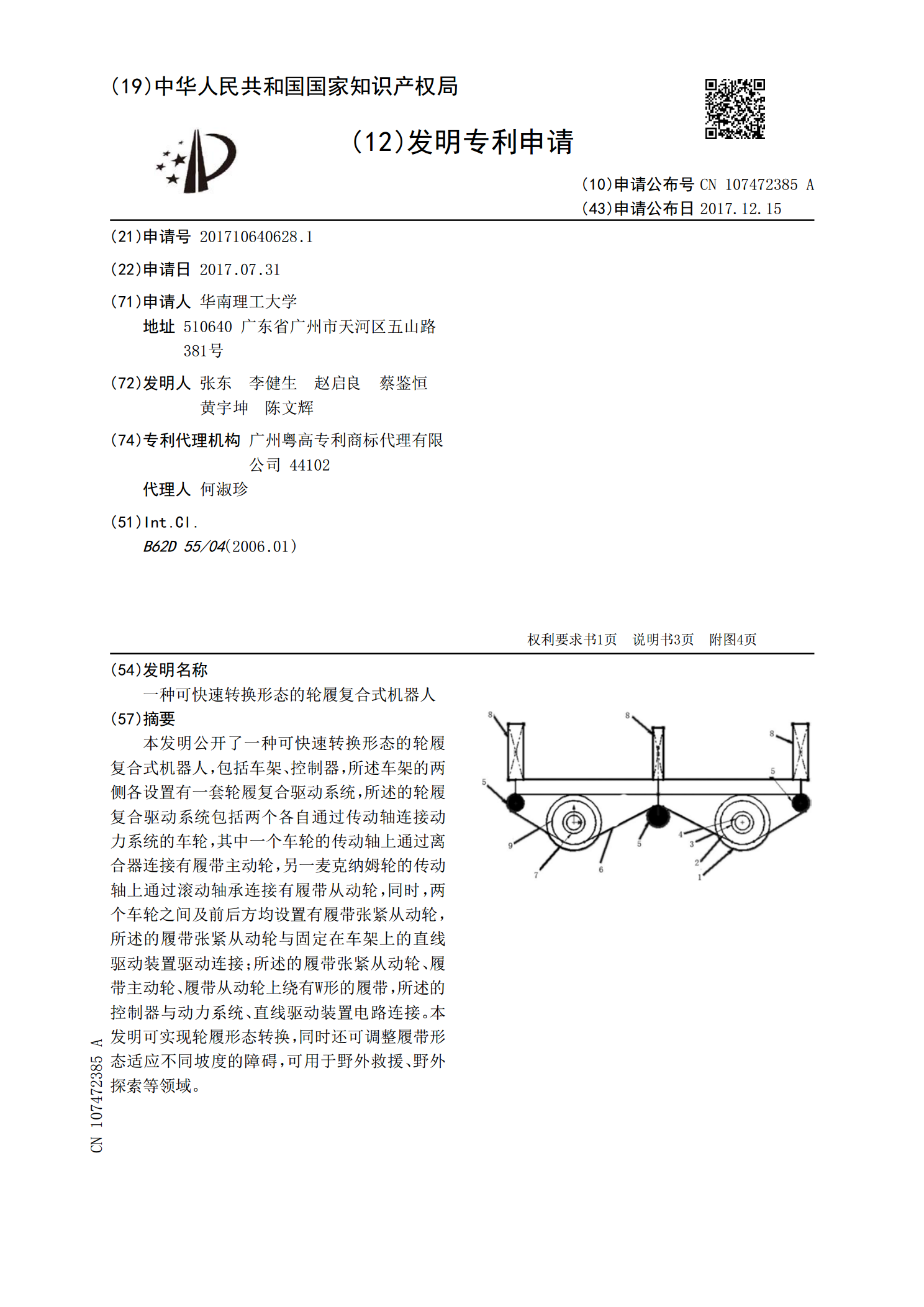
本发明公开了一种可快速转换形态的轮履复合式机器人,包括车架、控制器,所述车架的两侧各设置有一套轮履复合驱动系统,所述的轮履复合驱动系统包括两个各自通过传动轴连接动力系统的车轮,其中一个车轮的传动轴上通过离合器连接有履带主动轮,另一麦克纳姆轮的传动轴上通过滚动轴承连接有履带从动轮,同时,两个车轮之间及前后方均设置有履带张紧从动轮,所述的履带张紧从动轮与固定在车架上的直线驱动装置驱动连接;所述的履带张紧从动轮、履带主动轮、履带从动轮上绕有W形的履带,所述的控制器与动力系统、直线驱动装置电路连接。本发明可实现轮
一种轮履形态可重构移动救援机器人.pdf
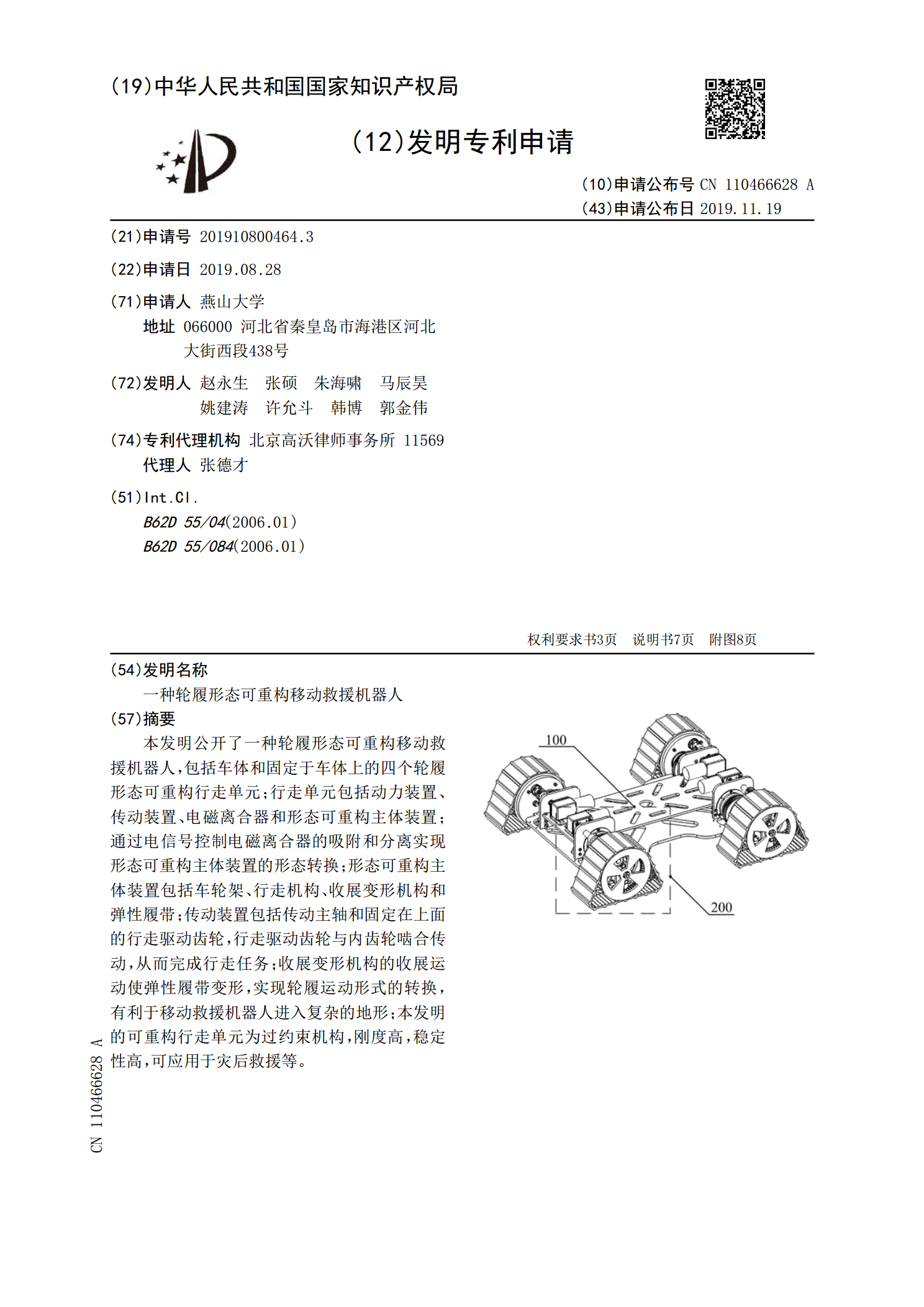
本发明公开了一种轮履形态可重构移动救援机器人,包括车体和固定于车体上的四个轮履形态可重构行走单元;行走单元包括动力装置、传动装置、电磁离合器和形态可重构主体装置;通过电信号控制电磁离合器的吸附和分离实现形态可重构主体装置的形态转换;形态可重构主体装置包括车轮架、行走机构、收展变形机构和弹性履带;传动装置包括传动主轴和固定在上面的行走驱动齿轮,行走驱动齿轮与内齿轮啮合传动,从而完成行走任务;收展变形机构的收展运动使弹性履带变形,实现轮履运动形式的转换,有利于移动救援机器人进入复杂的地形;本发明的可重构行走单
一种轮履复合式可重构车轮.pdf
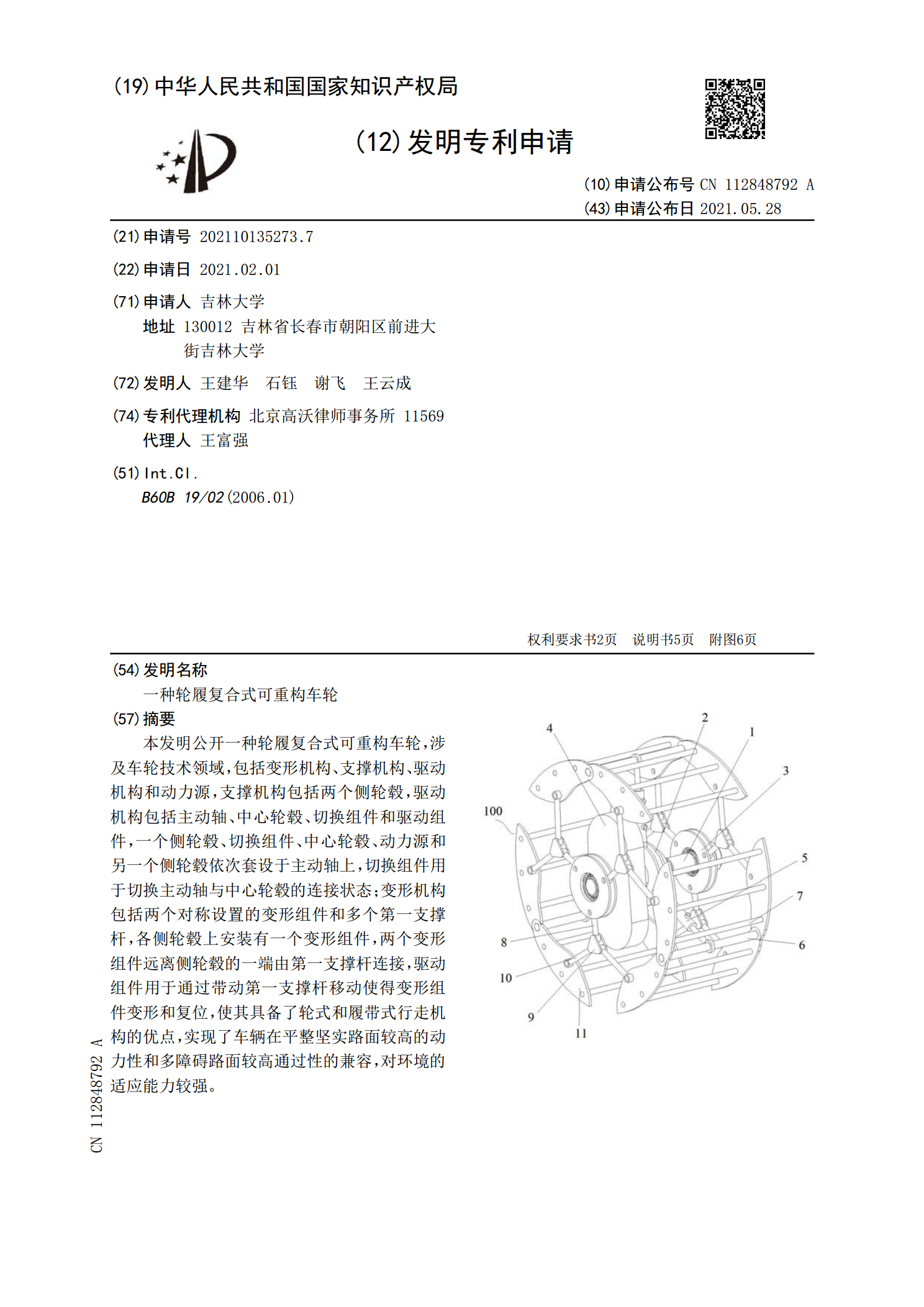
本发明公开一种轮履复合式可重构车轮,涉及车轮技术领域,包括变形机构、支撑机构、驱动机构和动力源,支撑机构包括两个侧轮毂,驱动机构包括主动轴、中心轮毂、切换组件和驱动组件,一个侧轮毂、切换组件、中心轮毂、动力源和另一个侧轮毂依次套设于主动轴上,切换组件用于切换主动轴与中心轮毂的连接状态;变形机构包括两个对称设置的变形组件和多个第一支撑杆,各侧轮毂上安装有一个变形组件,两个变形组件远离侧轮毂的一端由第一支撑杆连接,驱动组件用于通过带动第一支撑杆移动使得变形组件变形和复位,使其具备了轮式和履带式行走机构的优点,
一种轮履复合式行走机器人.pdf
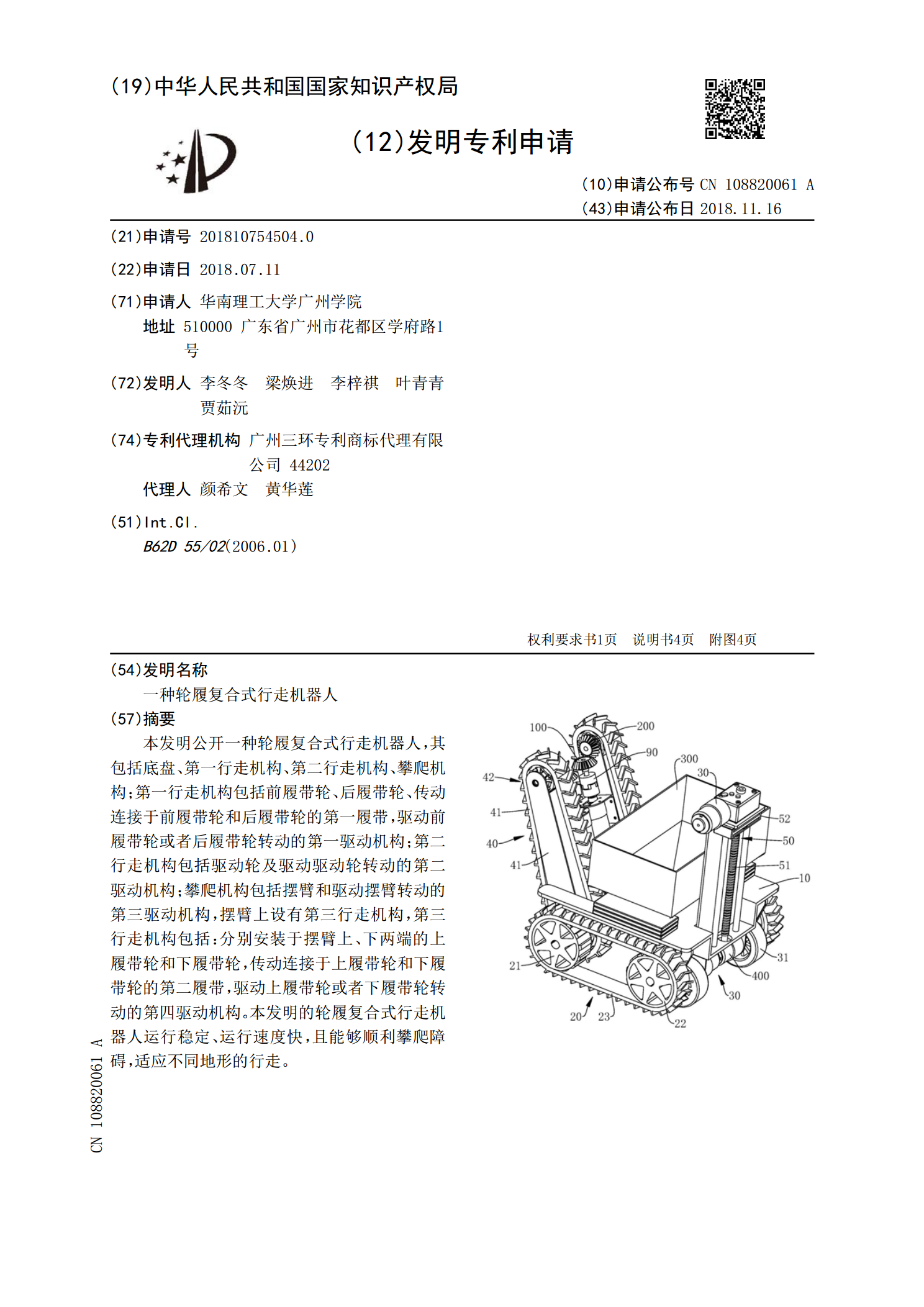
本发明公开一种轮履复合式行走机器人,其包括底盘、第一行走机构、第二行走机构、攀爬机构;第一行走机构包括前履带轮、后履带轮、传动连接于前履带轮和后履带轮的第一履带,驱动前履带轮或者后履带轮转动的第一驱动机构;第二行走机构包括驱动轮及驱动驱动轮转动的第二驱动机构;攀爬机构包括摆臂和驱动摆臂转动的第三驱动机构,摆臂上设有第三行走机构,第三行走机构包括:分别安装于摆臂上、下两端的上履带轮和下履带轮,传动连接于上履带轮和下履带轮的第二履带,驱动上履带轮或者下履带轮转动的第四驱动机构。本发明的轮履复合式行走机器人运行
一种轮履复合式管道机器人.pdf
本发明公开了一种轮履复合式管道机器人,包括履带式行进驱动装置、两个从动轮装置和控制器,行进驱动装置上左右对称的设置两个L型支架,两个L型支架的一端固定在行进驱动装置上,另一端竖直向下,两个从动轮装置分别安装在两个L型支架上;从动轮装置包括从动轮,驱动从动轮升降的升降机构和驱动从动轮转向的转向机构;升降机构包括第一电机、第一主动齿轮、第一从动齿轮、丝杆和导杆;转向机构包括第二电机、第二主动齿轮、第二从动齿轮和转轴;从动轮上设置压力传感器;控制器与行进驱动装置、第一电机、第二电机以及压力传感器连接。本发明的轮