
一种轮履复合式行走机器人.pdf

努力****爱静

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮履复合式行走机器人.pdf
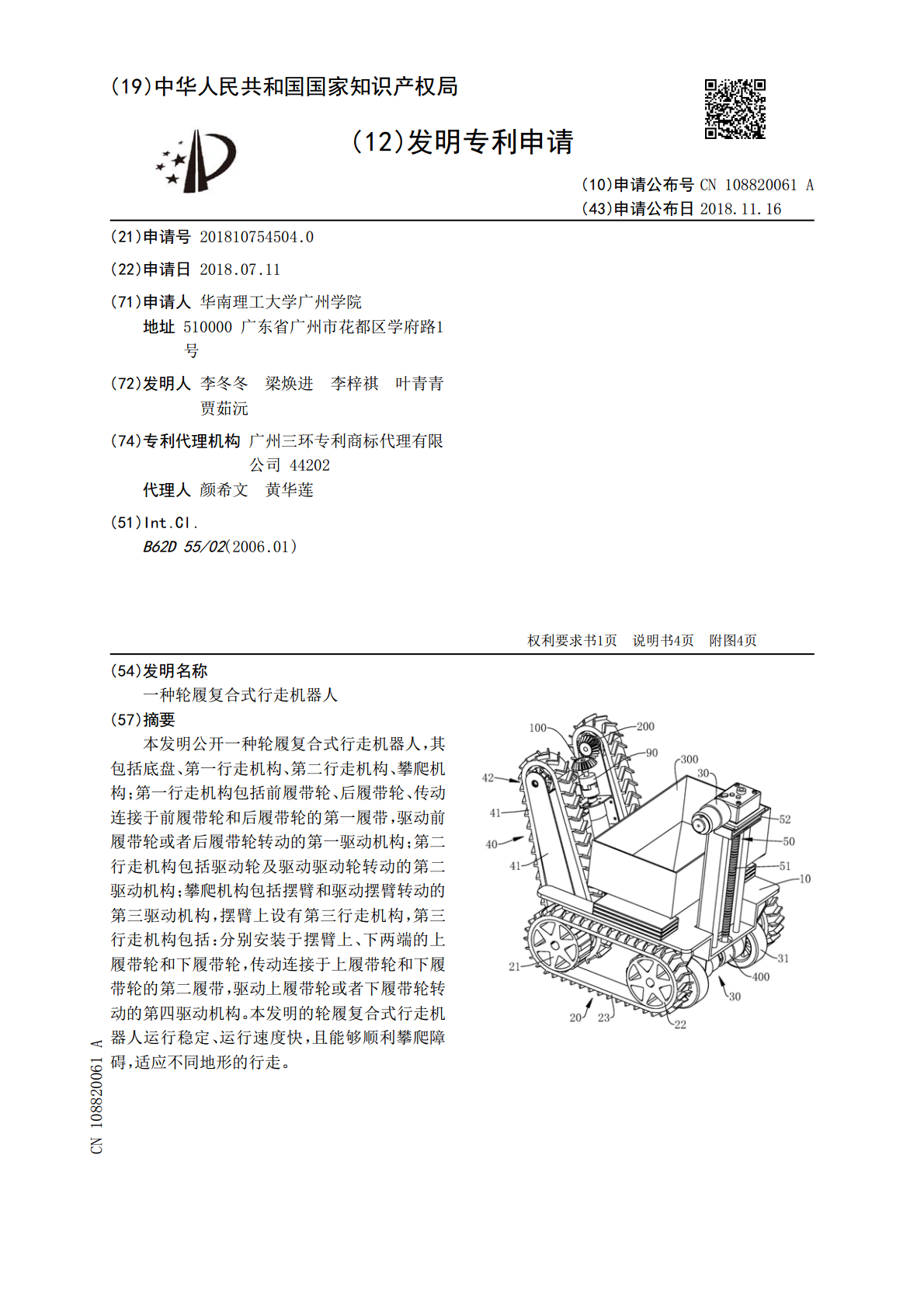
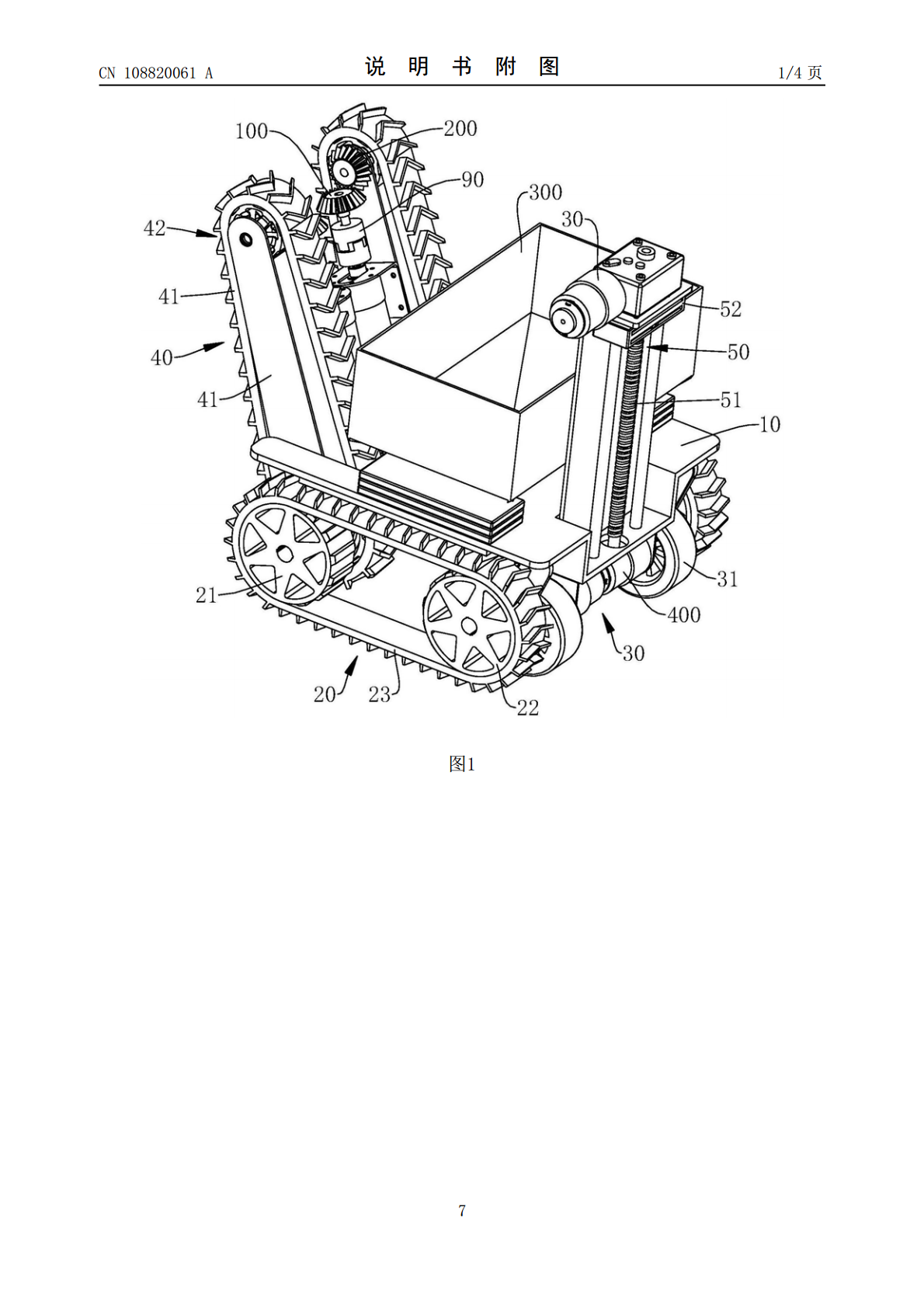
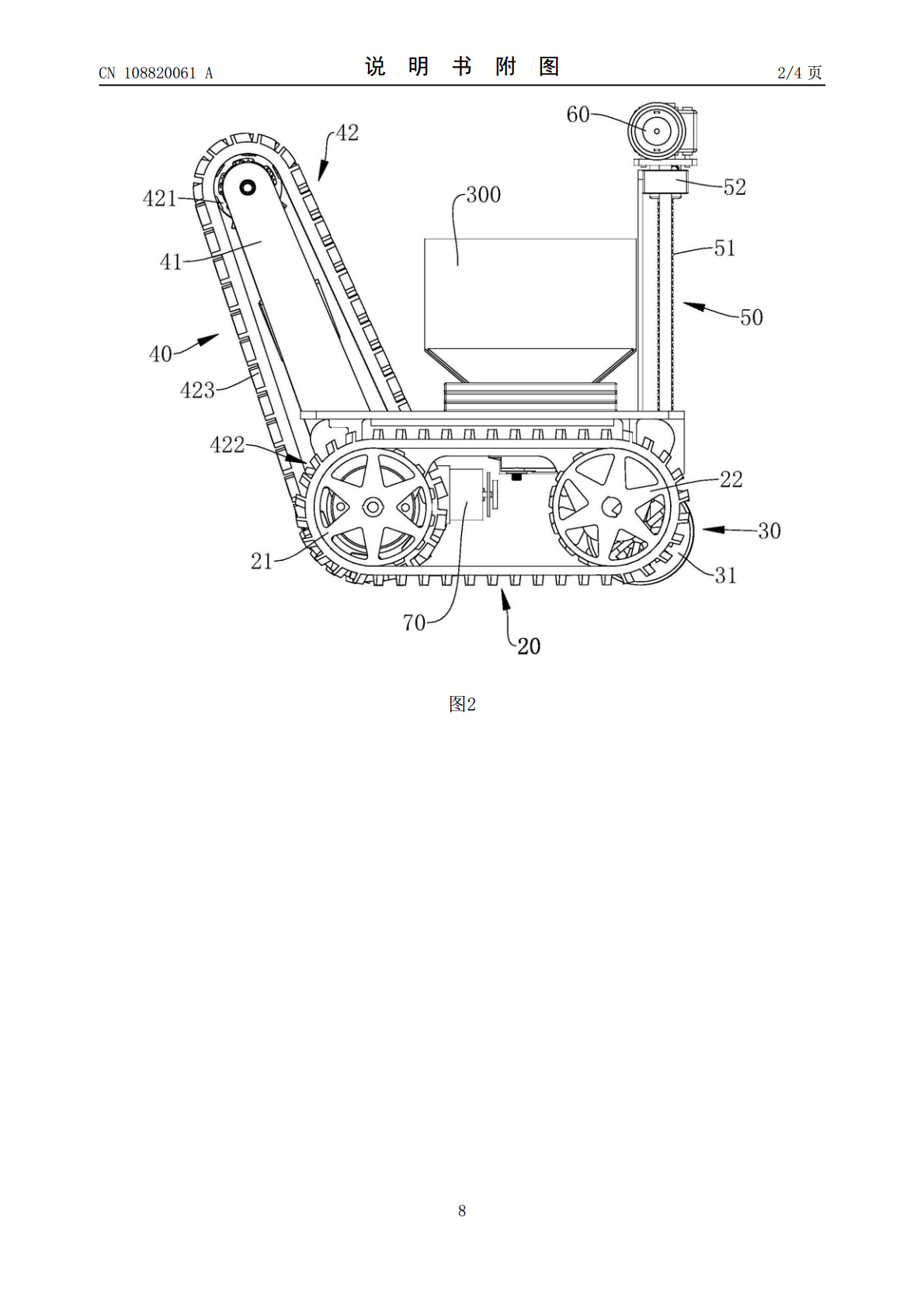
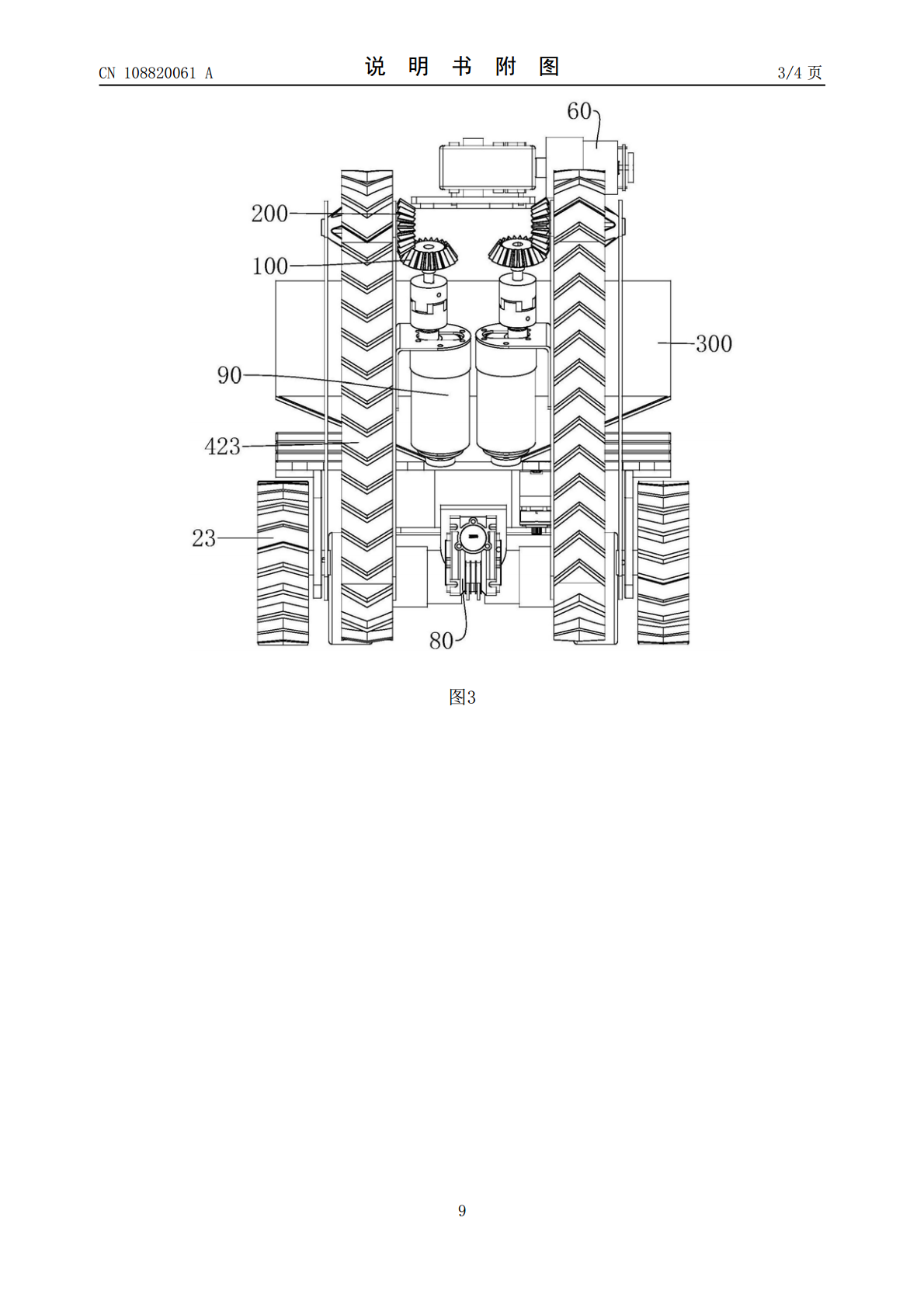
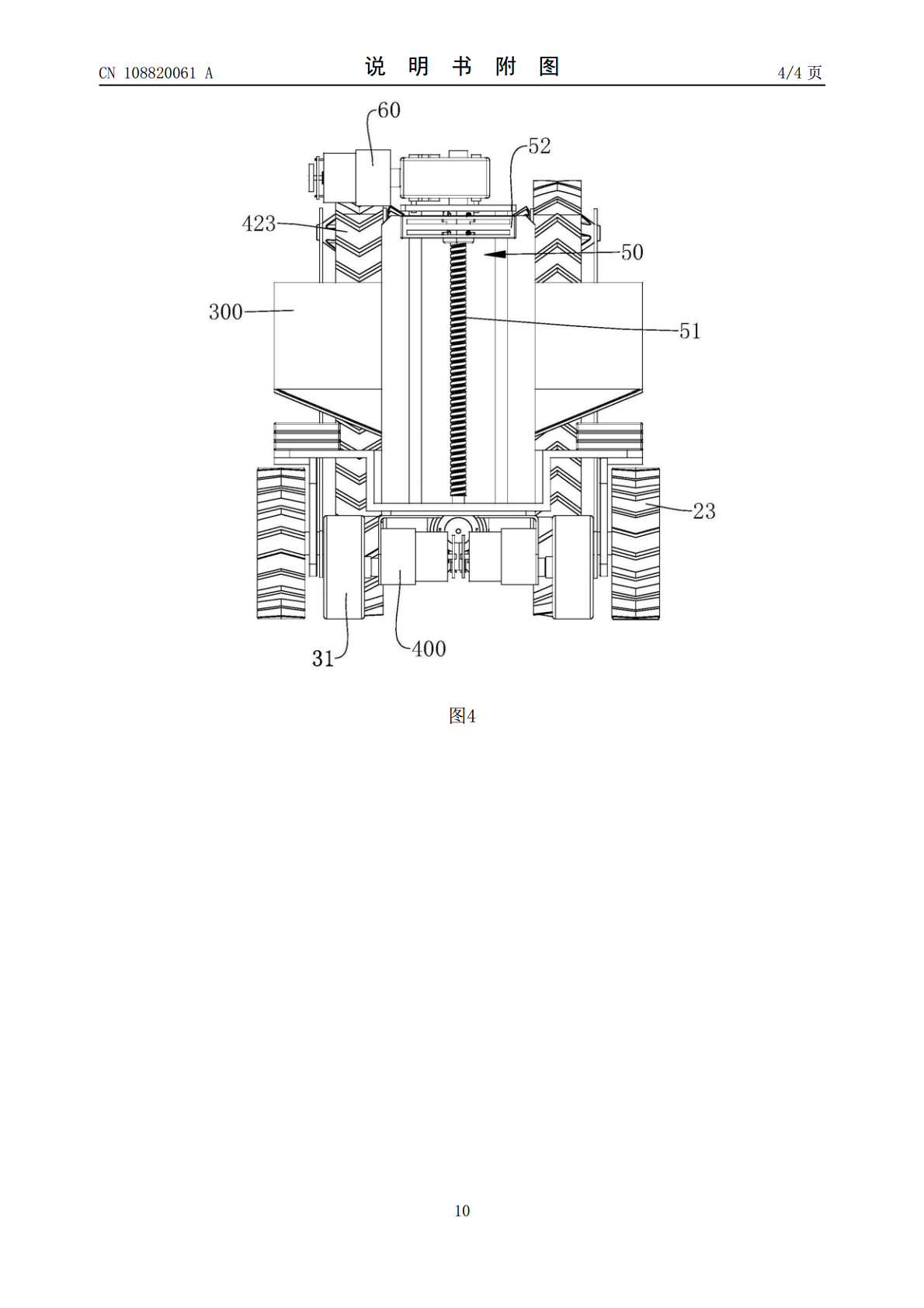
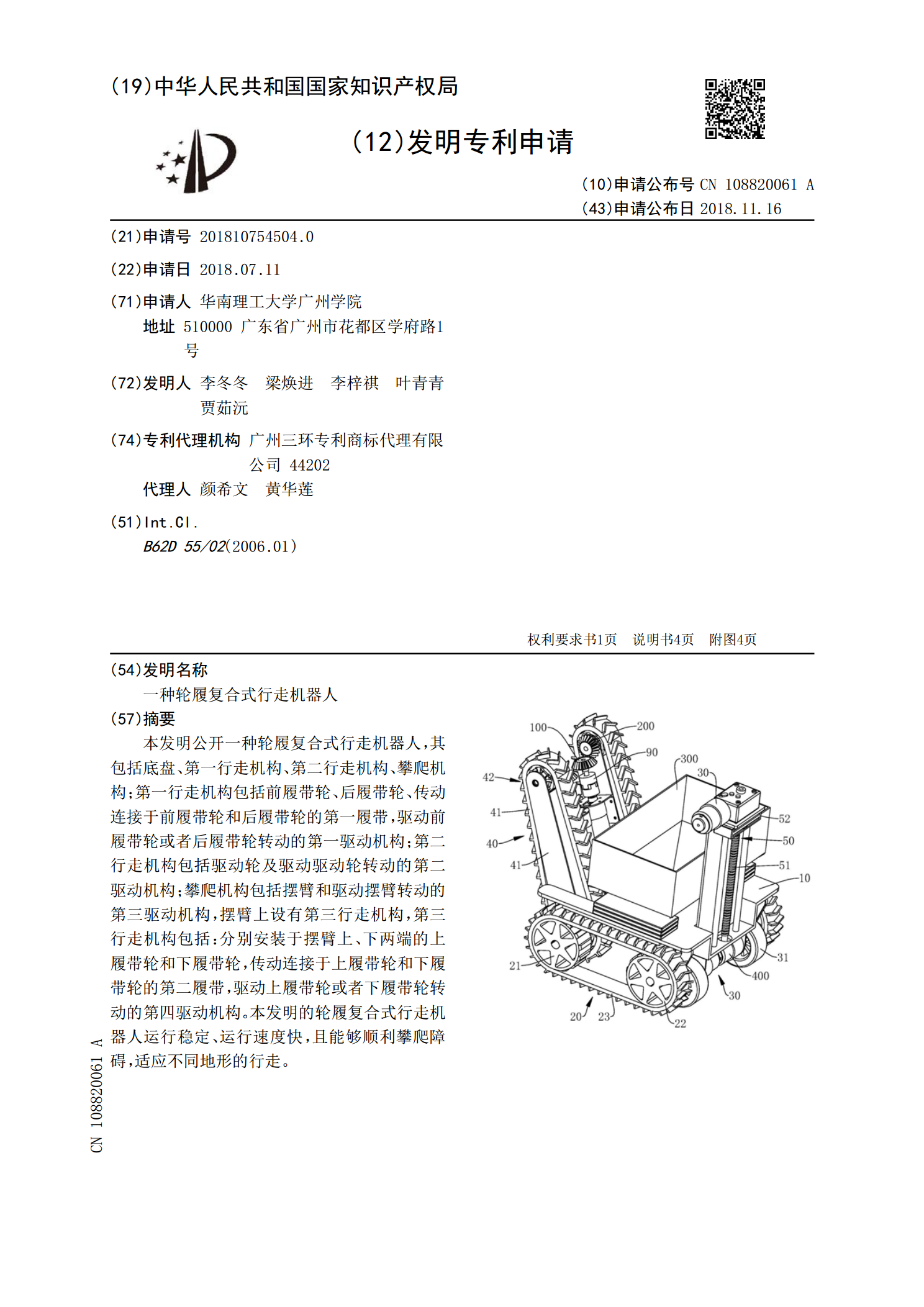
本发明公开一种轮履复合式行走机器人,其包括底盘、第一行走机构、第二行走机构、攀爬机构;第一行走机构包括前履带轮、后履带轮、传动连接于前履带轮和后履带轮的第一履带,驱动前履带轮或者后履带轮转动的第一驱动机构;第二行走机构包括驱动轮及驱动驱动轮转动的第二驱动机构;攀爬机构包括摆臂和驱动摆臂转动的第三驱动机构,摆臂上设有第三行走机构,第三行走机构包括:分别安装于摆臂上、下两端的上履带轮和下履带轮,传动连接于上履带轮和下履带轮的第二履带,驱动上履带轮或者下履带轮转动的第四驱动机构。本发明的轮履复合式行走机器人运行
一种全地形轮履复合式行走机构.pdf
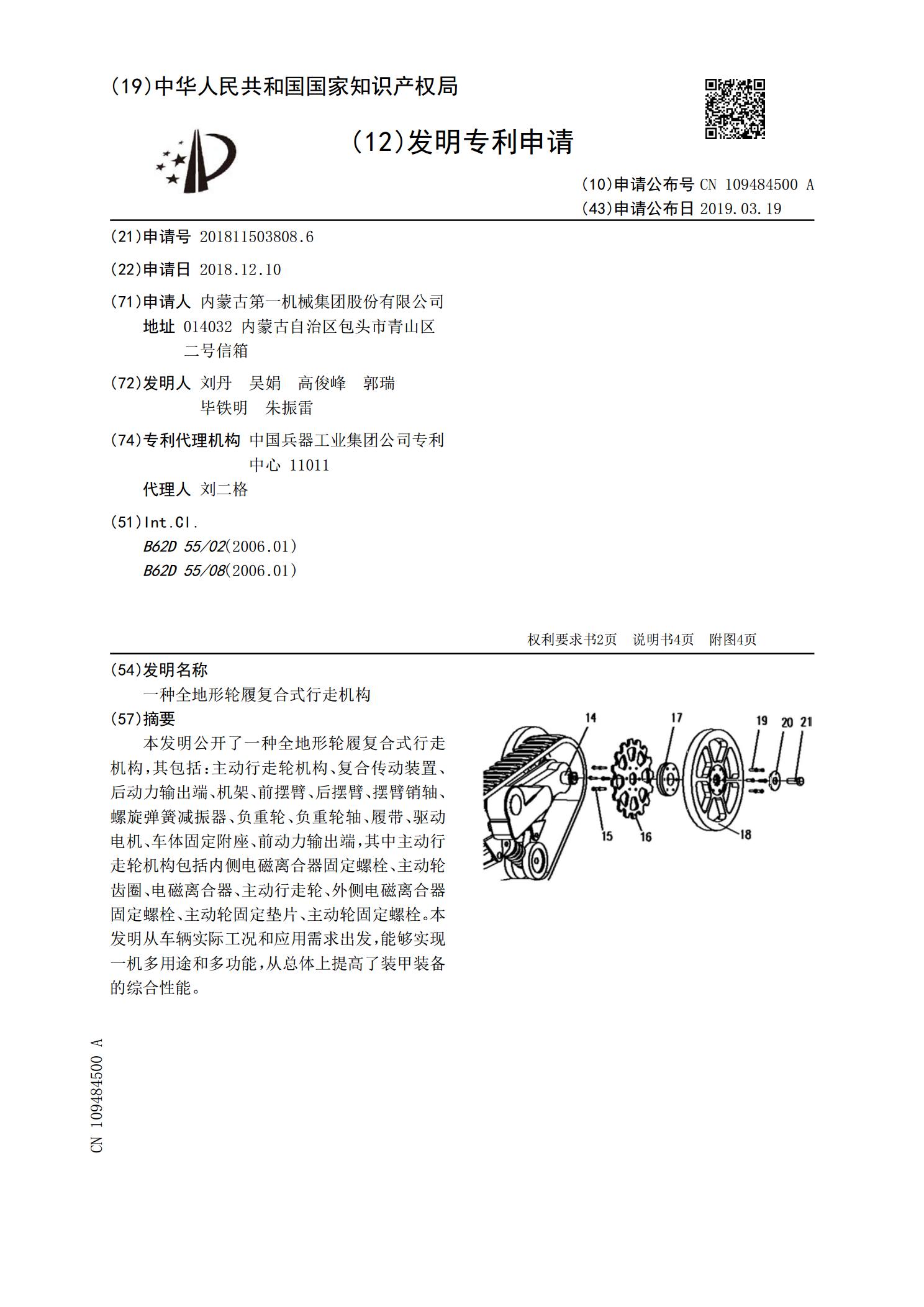
本发明公开了一种全地形轮履复合式行走机构,其包括:主动行走轮机构、复合传动装置、后动力输出端、机架、前摆臂、后摆臂、摆臂销轴、螺旋弹簧减振器、负重轮、负重轮轴、履带、驱动电机、车体固定附座、前动力输出端,其中主动行走轮机构包括内侧电磁离合器固定螺栓、主动轮齿圈、电磁离合器、主动行走轮、外侧电磁离合器固定螺栓、主动轮固定垫片、主动轮固定螺栓。本发明从车辆实际工况和应用需求出发,能够实现一机多用途和多功能,从总体上提高了装甲装备的综合性能。

轮履复合式巡检机器人行走机构及其工作方法.pdf
本发明公开了一种轮履复合式巡检机器人行走机构,它是在主体履带机构前部还安装有摆臂履带机构和行走轮机构;其中摆臂履带机构由安装在主体履带机构架体上的摆臂轴和摆臂电机以及安装在摆臂轴两端的左、右履带臂组成,摆臂电机通过摆臂减速器驱动摆臂轴转动,摆臂轴带动左、右履带臂上下摆动;行走轮机构,包括安装在主体履带机构底面中心线上的万向轮和左、右行走轮,构成三轮的行走方式。本发明采用新型轮履复合式移动机构,可以实现完全独立的履带移动和轮式移动,且两种运动方式互不干扰,充分发挥了轮式移动的灵活性和履带式移动的越障性能强等
一种轮履复合式管道机器人.pdf
本发明公开了一种轮履复合式管道机器人,包括履带式行进驱动装置、两个从动轮装置和控制器,行进驱动装置上左右对称的设置两个L型支架,两个L型支架的一端固定在行进驱动装置上,另一端竖直向下,两个从动轮装置分别安装在两个L型支架上;从动轮装置包括从动轮,驱动从动轮升降的升降机构和驱动从动轮转向的转向机构;升降机构包括第一电机、第一主动齿轮、第一从动齿轮、丝杆和导杆;转向机构包括第二电机、第二主动齿轮、第二从动齿轮和转轴;从动轮上设置压力传感器;控制器与行进驱动装置、第一电机、第二电机以及压力传感器连接。本发明的轮
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
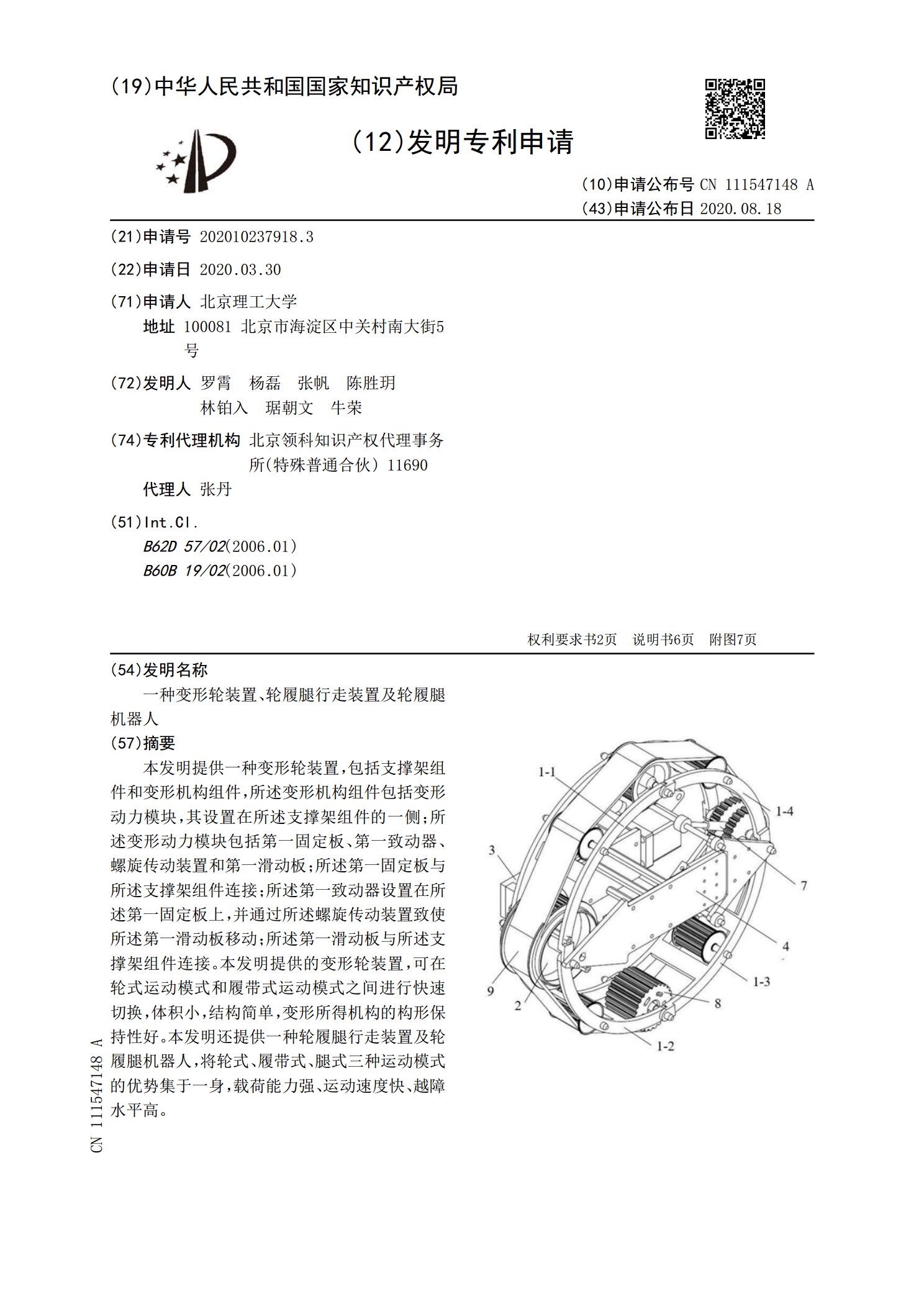
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人