
一种轮履复合式管道机器人.pdf

诗文****仙女


1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮履复合式管道机器人.pdf
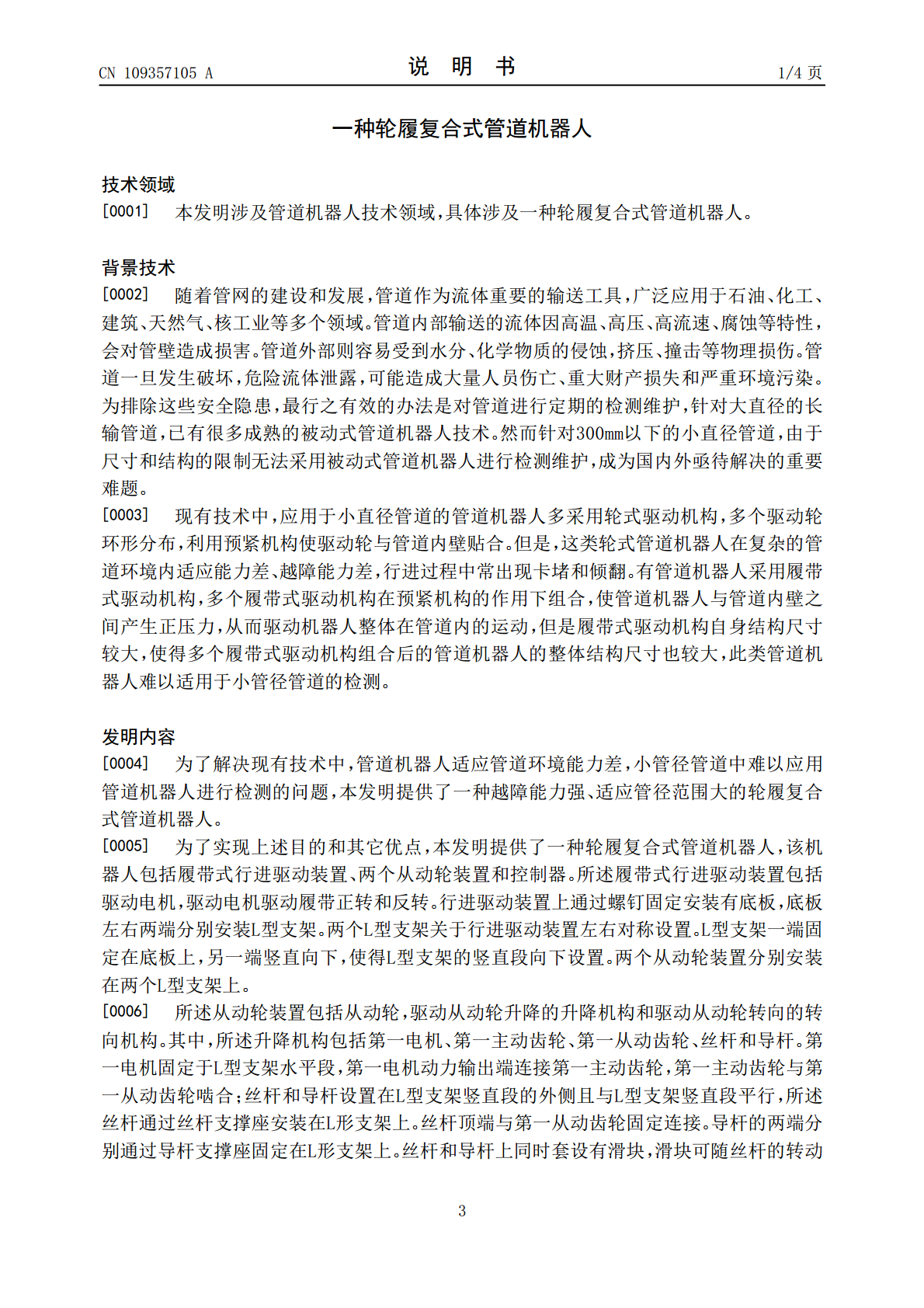
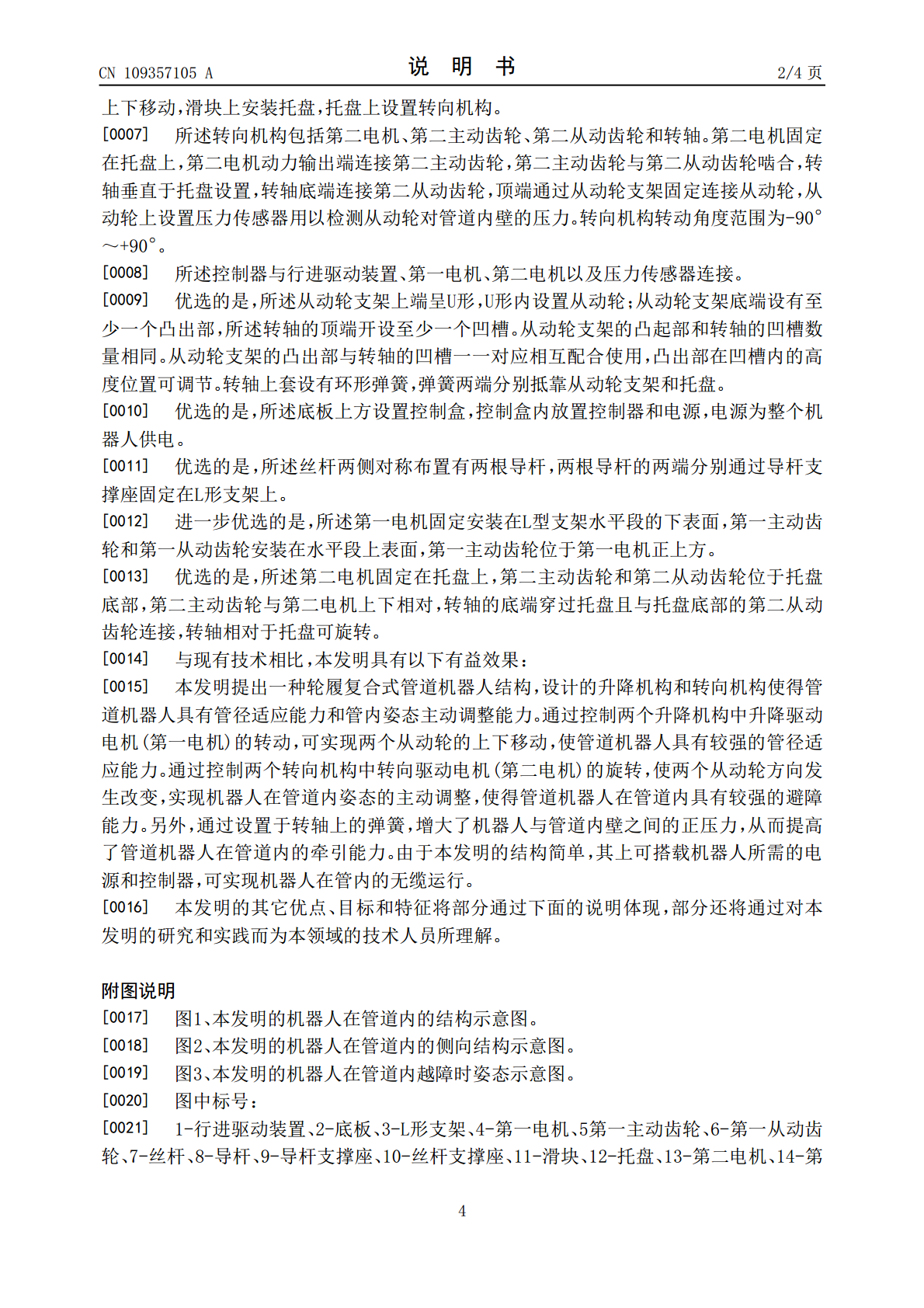
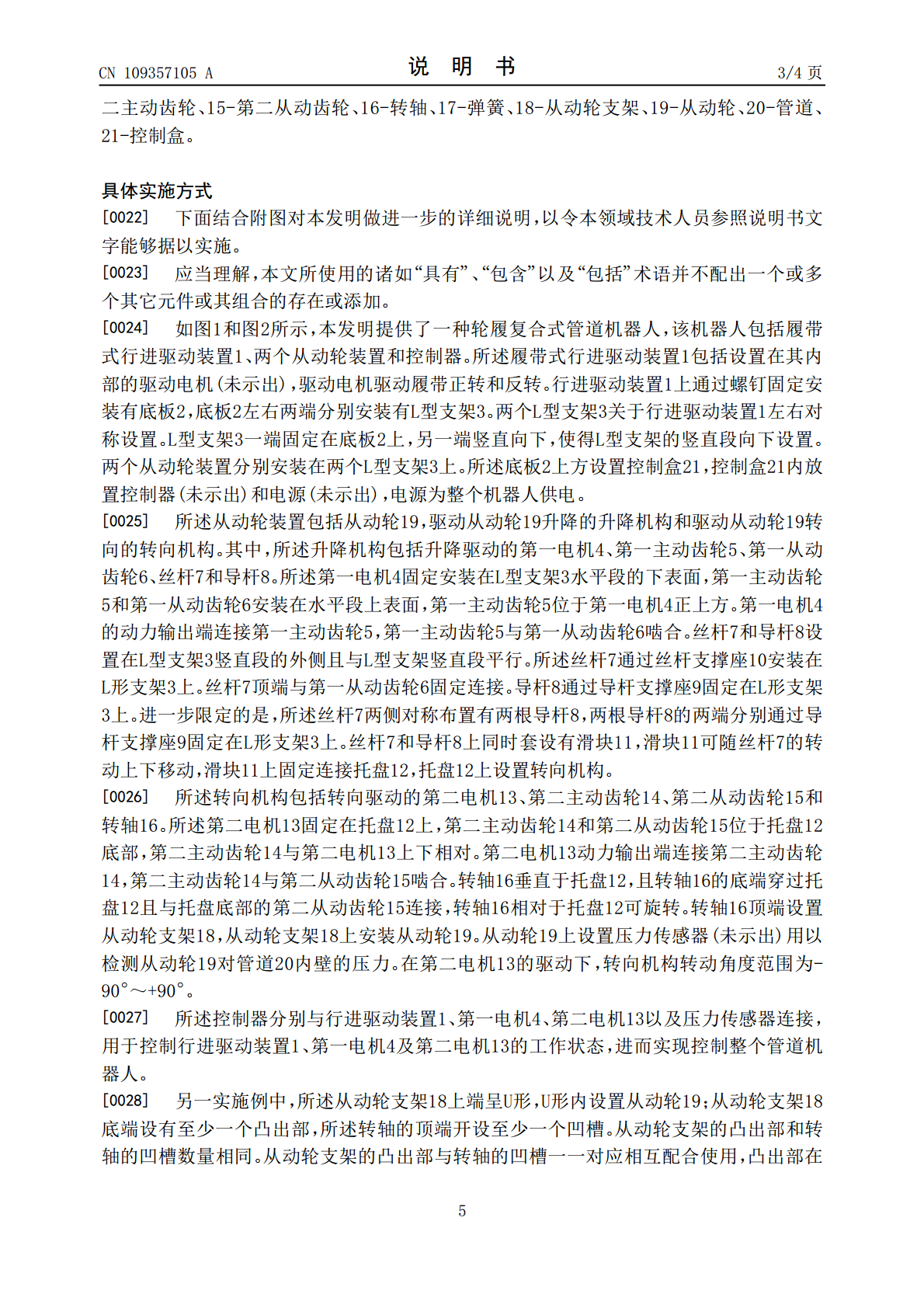
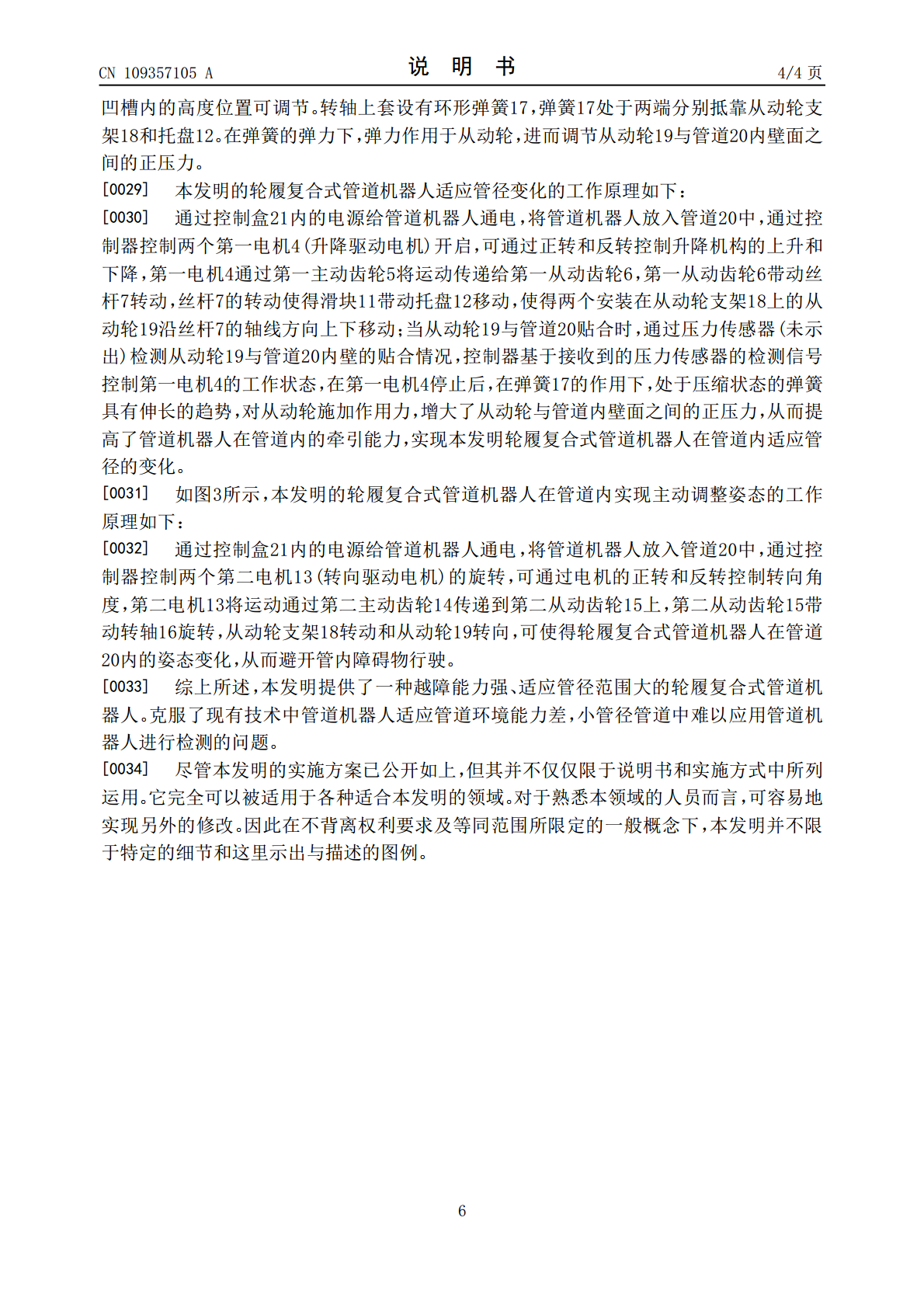
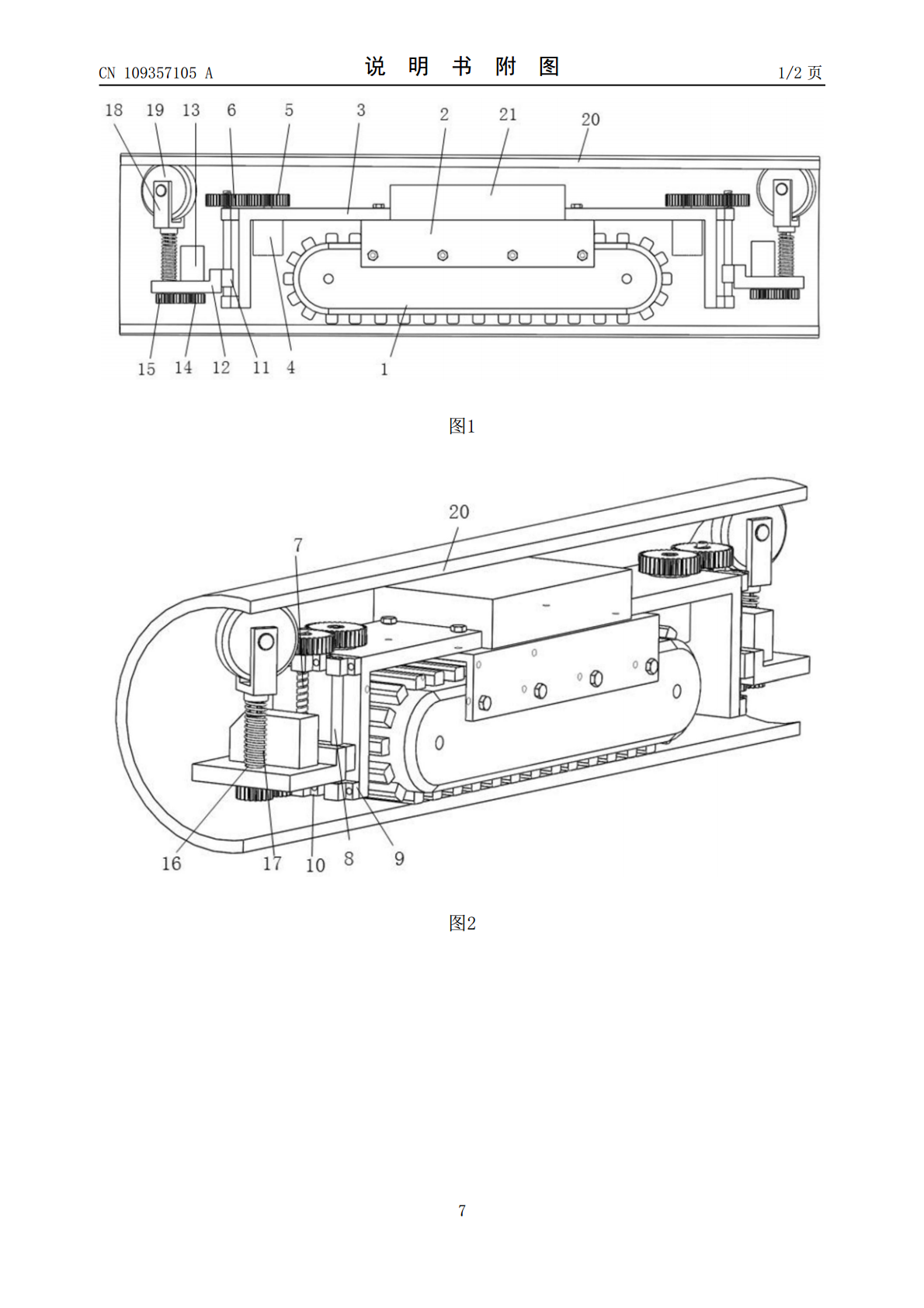
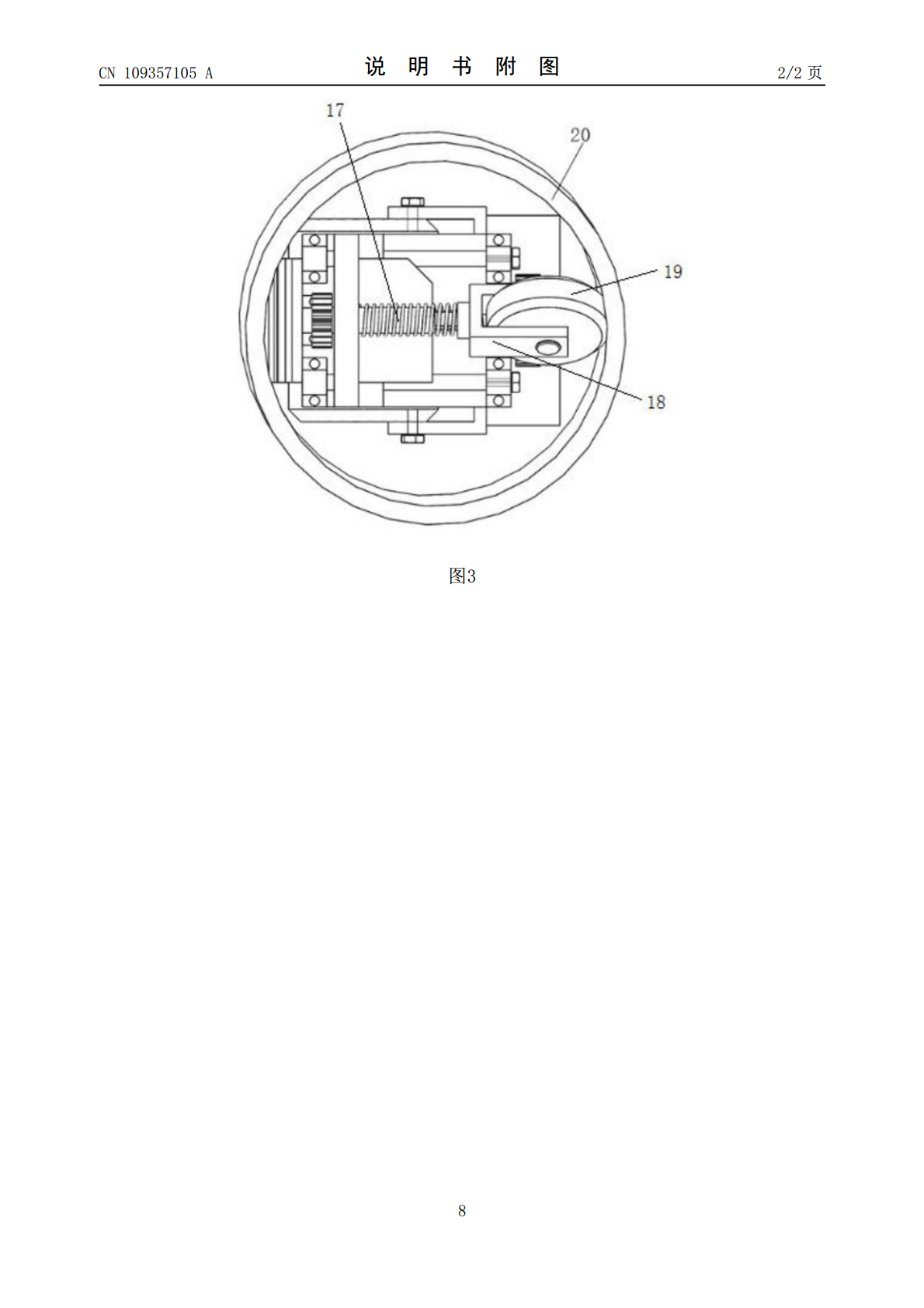
本发明公开了一种轮履复合式管道机器人,包括履带式行进驱动装置、两个从动轮装置和控制器,行进驱动装置上左右对称的设置两个L型支架,两个L型支架的一端固定在行进驱动装置上,另一端竖直向下,两个从动轮装置分别安装在两个L型支架上;从动轮装置包括从动轮,驱动从动轮升降的升降机构和驱动从动轮转向的转向机构;升降机构包括第一电机、第一主动齿轮、第一从动齿轮、丝杆和导杆;转向机构包括第二电机、第二主动齿轮、第二从动齿轮和转轴;从动轮上设置压力传感器;控制器与行进驱动装置、第一电机、第二电机以及压力传感器连接。本发明的轮
一种轮履复合式行走机器人.pdf
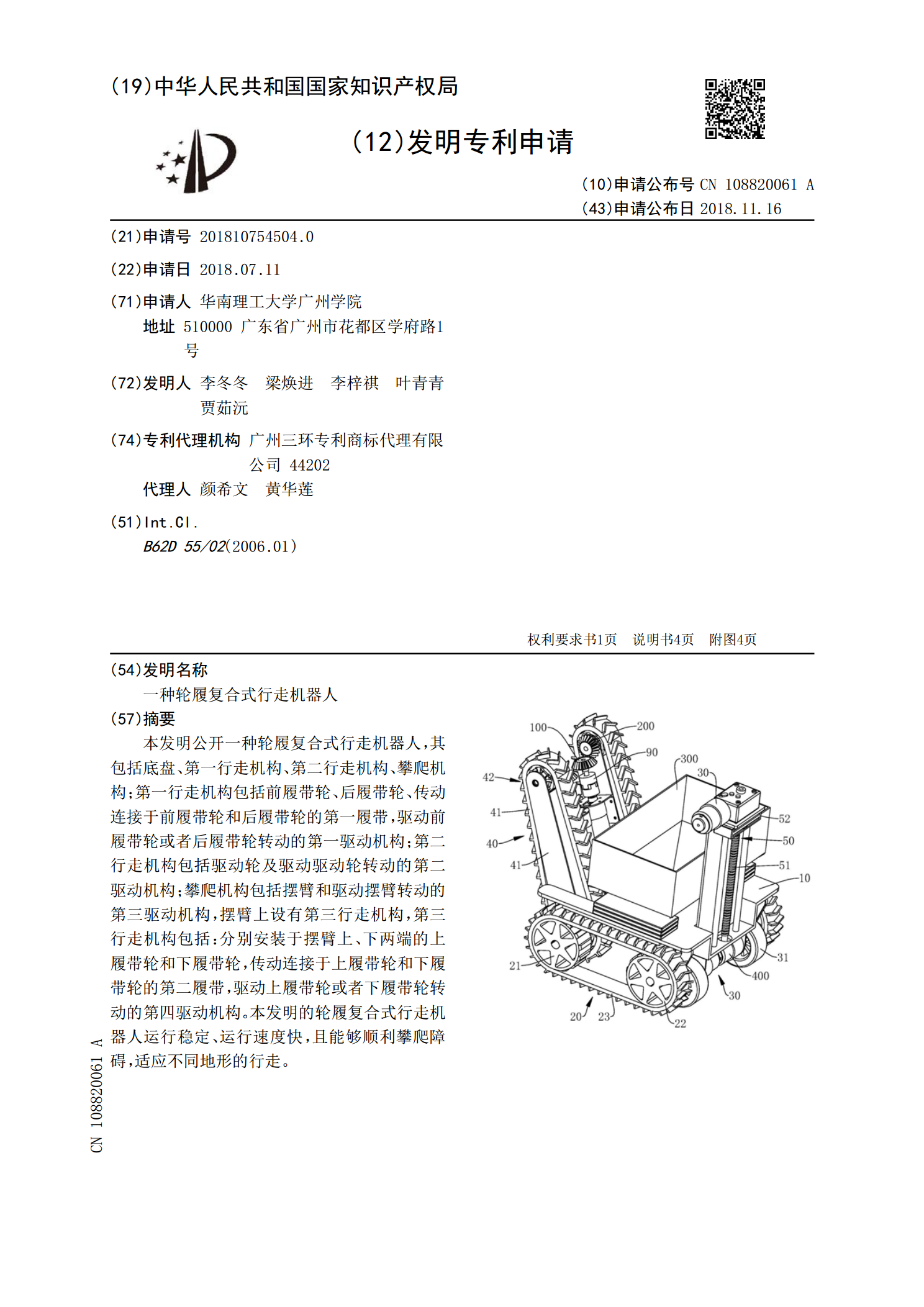
本发明公开一种轮履复合式行走机器人,其包括底盘、第一行走机构、第二行走机构、攀爬机构;第一行走机构包括前履带轮、后履带轮、传动连接于前履带轮和后履带轮的第一履带,驱动前履带轮或者后履带轮转动的第一驱动机构;第二行走机构包括驱动轮及驱动驱动轮转动的第二驱动机构;攀爬机构包括摆臂和驱动摆臂转动的第三驱动机构,摆臂上设有第三行走机构,第三行走机构包括:分别安装于摆臂上、下两端的上履带轮和下履带轮,传动连接于上履带轮和下履带轮的第二履带,驱动上履带轮或者下履带轮转动的第四驱动机构。本发明的轮履复合式行走机器人运行
一种轮履串联式管道机器人.pdf
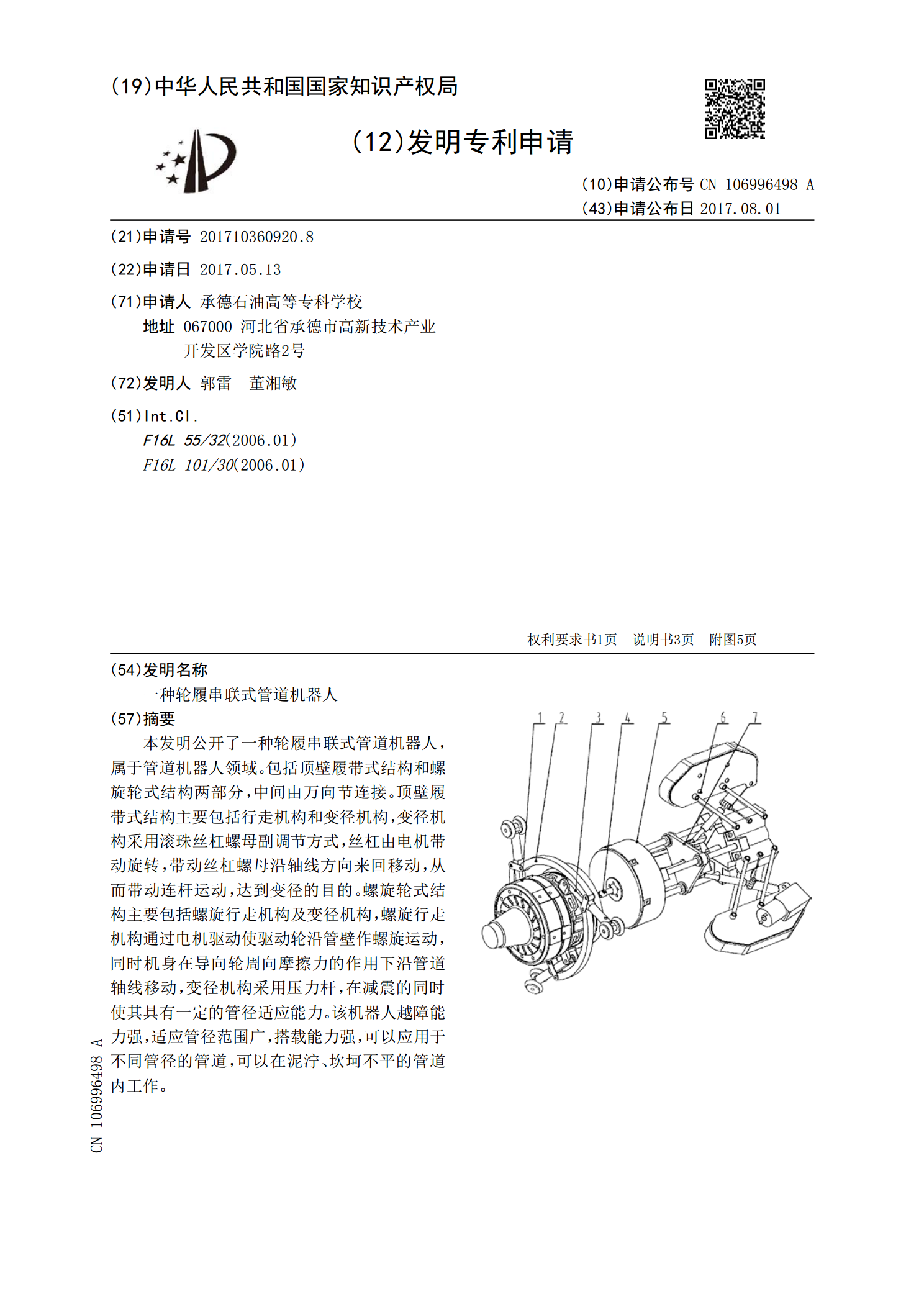
本发明公开了一种轮履串联式管道机器人,属于管道机器人领域。包括顶壁履带式结构和螺旋轮式结构两部分,中间由万向节连接。顶壁履带式结构主要包括行走机构和变径机构,变径机构采用滚珠丝杠螺母副调节方式,丝杠由电机带动旋转,带动丝杠螺母沿轴线方向来回移动,从而带动连杆运动,达到变径的目的。螺旋轮式结构主要包括螺旋行走机构及变径机构,螺旋行走机构通过电机驱动使驱动轮沿管壁作螺旋运动,同时机身在导向轮周向摩擦力的作用下沿管道轴线移动,变径机构采用压力杆,在减震的同时使其具有一定的管径适应能力。该机器人越障能力强,适应管
一种轮履复合式炉管壁厚检测机器人.pdf
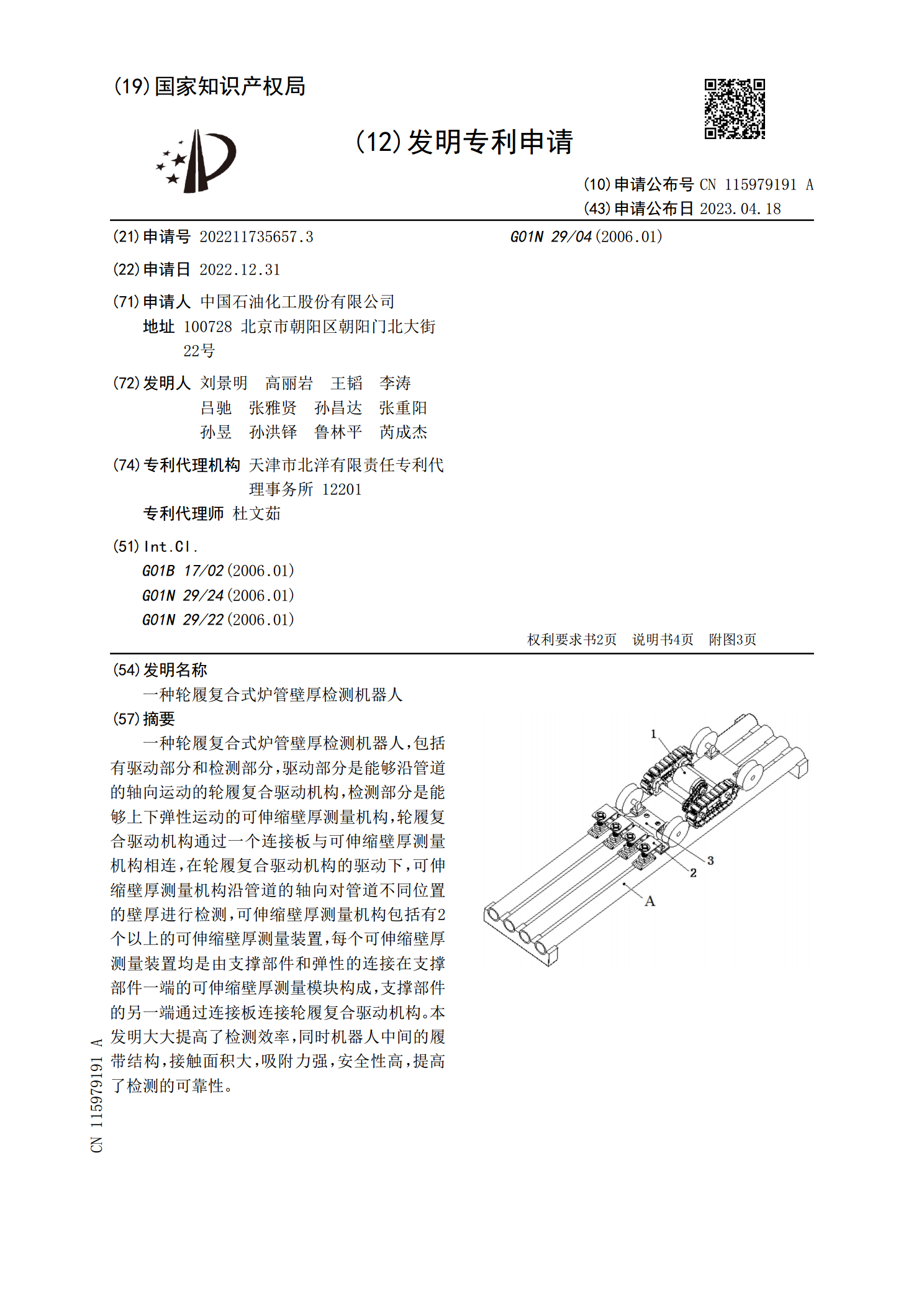
一种轮履复合式炉管壁厚检测机器人,包括有驱动部分和检测部分,驱动部分是能够沿管道的轴向运动的轮履复合驱动机构,检测部分是能够上下弹性运动的可伸缩壁厚测量机构,轮履复合驱动机构通过一个连接板与可伸缩壁厚测量机构相连,在轮履复合驱动机构的驱动下,可伸缩壁厚测量机构沿管道的轴向对管道不同位置的壁厚进行检测,可伸缩壁厚测量机构包括有2个以上的可伸缩壁厚测量装置,每个可伸缩壁厚测量装置均是由支撑部件和弹性的连接在支撑部件一端的可伸缩壁厚测量模块构成,支撑部件的另一端通过连接板连接轮履复合驱动机构。本发明大大提高了检
一种腿轮履复合式钻孔救援探测机器人.pdf
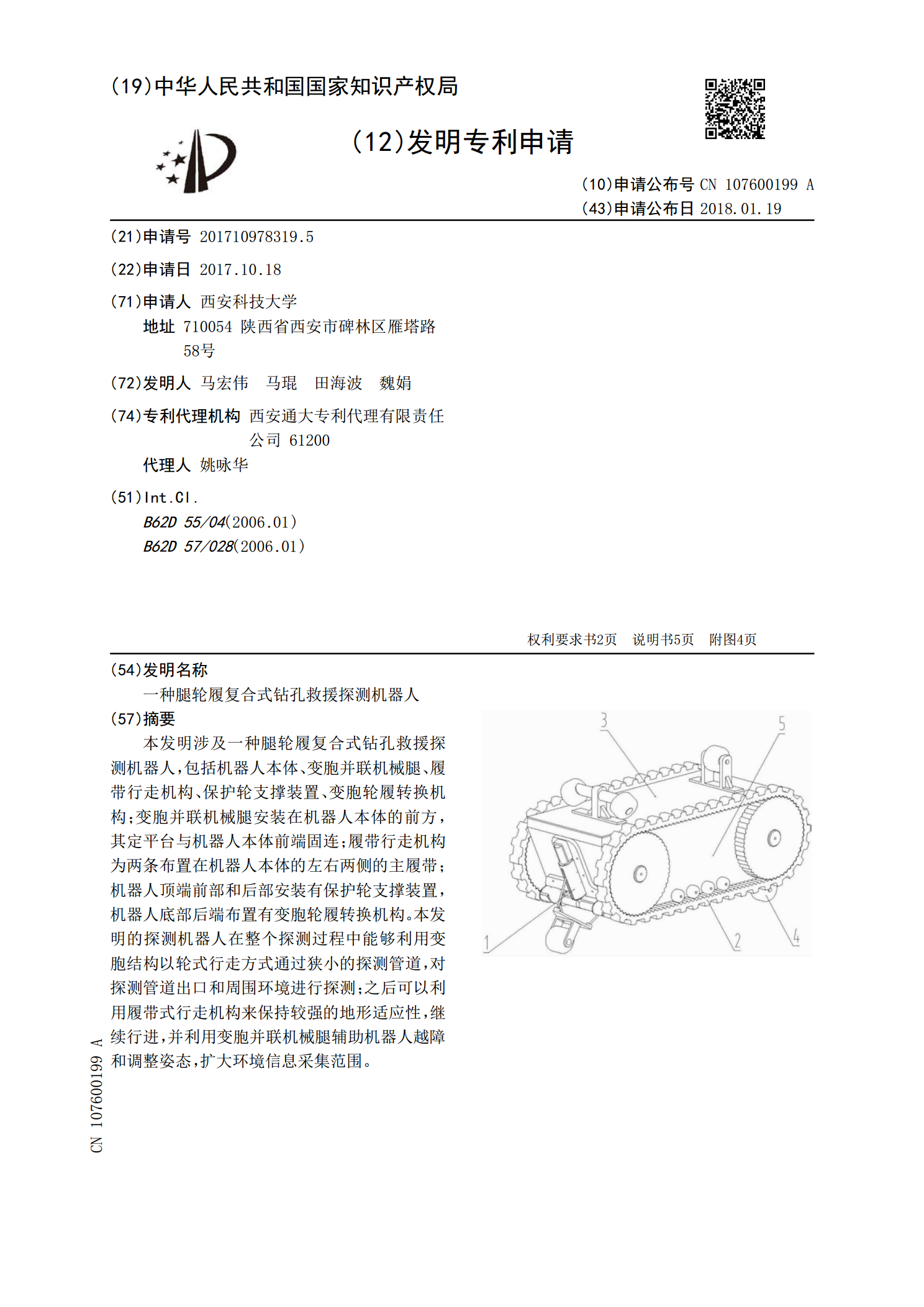
本发明涉及一种腿轮履复合式钻孔救援探测机器人,包括机器人本体、变胞并联机械腿、履带行走机构、保护轮支撑装置、变胞轮履转换机构;变胞并联机械腿安装在机器人本体的前方,其定平台与机器人本体前端固连;履带行走机构为两条布置在机器人本体的左右两侧的主履带;机器人顶端前部和后部安装有保护轮支撑装置,机器人底部后端布置有变胞轮履转换机构。本发明的探测机器人在整个探测过程中能够利用变胞结构以轮式行走方式通过狭小的探测管道,对探测管道出口和周围环境进行探测;之后可以利用履带式行走机构来保持较强的地形适应性,继续行进,并利