
一种轮履复合移动探测机器人.pdf

森林****来了


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮履复合移动探测机器人.pdf
本发明涉及一种轮履复合移动探测机器人,包括双目立体全景图像获取装置,控制器和轮履复合移动机器人,控制器包括自主导航控制系统,智能视频分析系统和微处理器,轮履复合移动探测机器人可根据双目全景立体图像获取装置所获得的路面情况自动控制其行驶方式,在路况较好的路面行驶时采用车轮,在路况较差的路面行驶时采用履带,实现行走机构用履带或用行走轮行驶的转换,且当使用履带行驶时,将主动行走轮和从动行走轮缩回在履带内;双目全景立体图像获取装置可将更直观、更立体的图像信息传送给控制中心,更清楚地了解现场情况,提供决策支持。
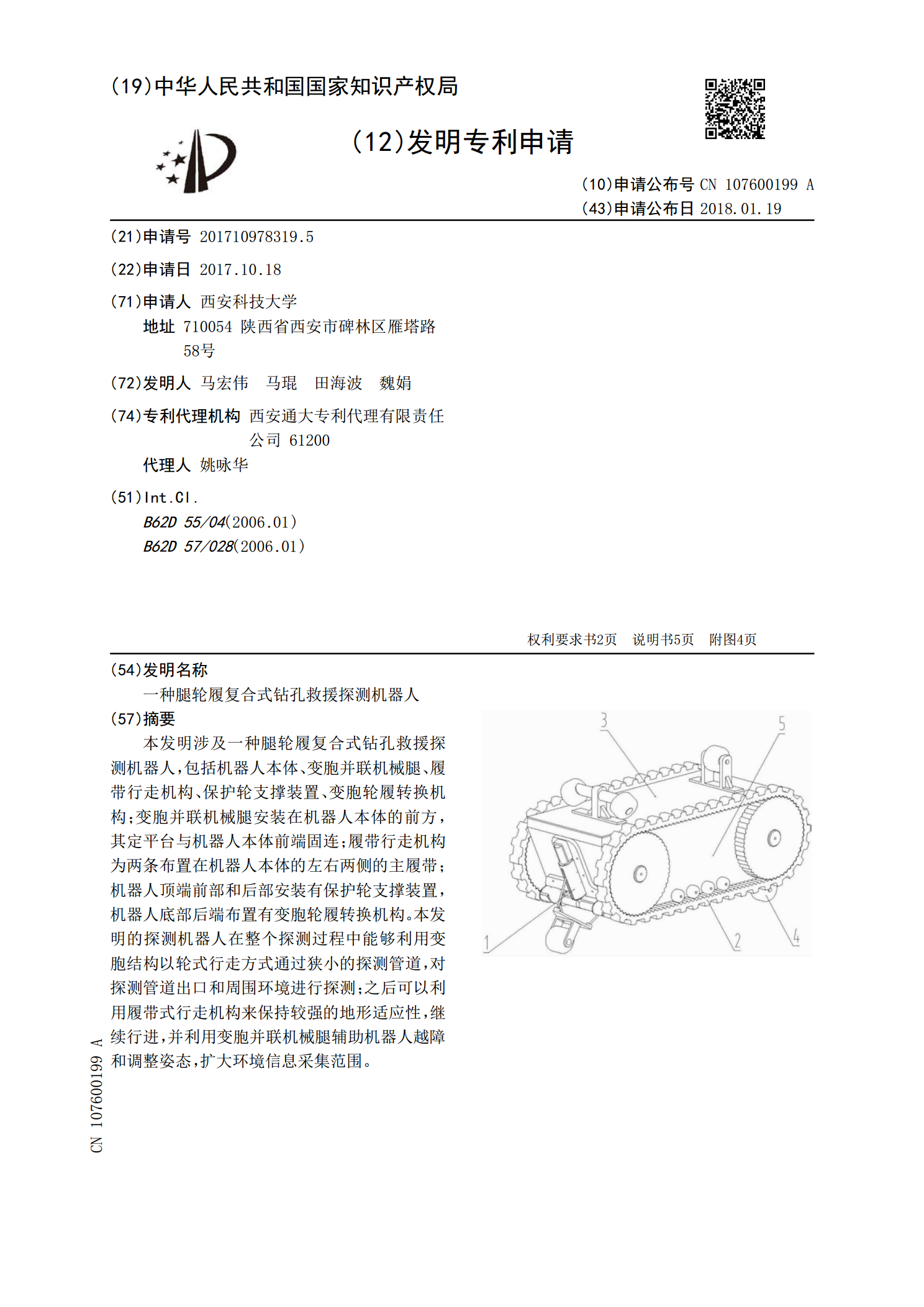
一种腿轮履复合式钻孔救援探测机器人.pdf
本发明涉及一种腿轮履复合式钻孔救援探测机器人,包括机器人本体、变胞并联机械腿、履带行走机构、保护轮支撑装置、变胞轮履转换机构;变胞并联机械腿安装在机器人本体的前方,其定平台与机器人本体前端固连;履带行走机构为两条布置在机器人本体的左右两侧的主履带;机器人顶端前部和后部安装有保护轮支撑装置,机器人底部后端布置有变胞轮履转换机构。本发明的探测机器人在整个探测过程中能够利用变胞结构以轮式行走方式通过狭小的探测管道,对探测管道出口和周围环境进行探测;之后可以利用履带式行走机构来保持较强的地形适应性,继续行进,并利

一种轮履复合移动机器人平台.pdf
本发明为一种轮履复合移动机器人平台,它包括行进系统、传动系统、动力系统、浮板式箱体、云台系统。所述行进系统固定在所述浮板式箱体的两侧,所述行进系统通过所述传动系统与所述位于浮板式箱体内的动力系统相连,所述云台系统位于所述浮板式箱体的上方并与所述动力系统相连;所述行进系统包括2组前后轮驱动同步带组件、4组翻转臂组件、4组轮胎组件。本发明所提出的移动机器人平台,结构独特,功能多样,行走可靠,便于拆卸,可广泛应用于特殊复杂环境的作业。
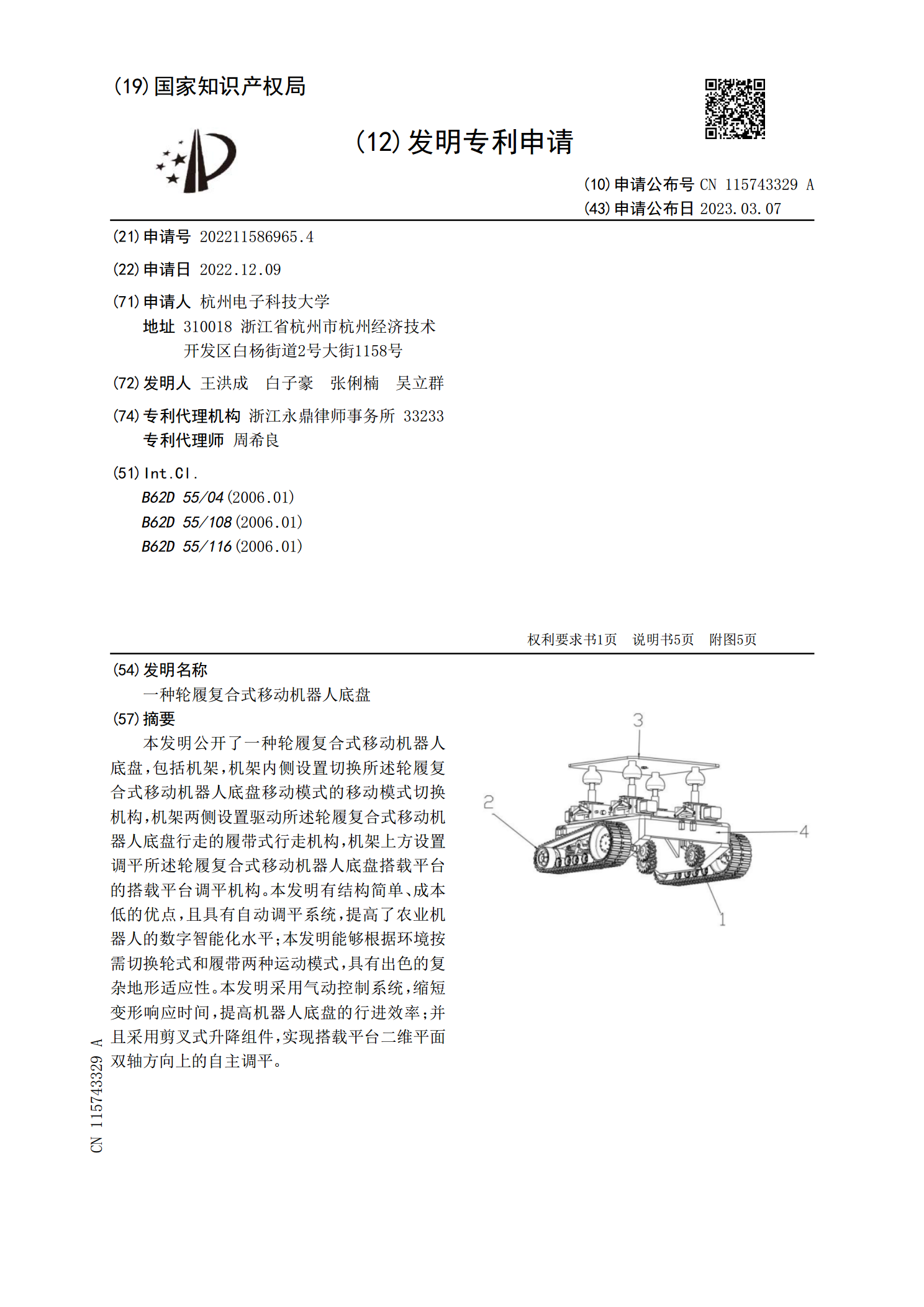
一种轮履复合式移动机器人底盘.pdf
本发明公开了一种轮履复合式移动机器人底盘,包括机架,机架内侧设置切换所述轮履复合式移动机器人底盘移动模式的移动模式切换机构,机架两侧设置驱动所述轮履复合式移动机器人底盘行走的履带式行走机构,机架上方设置调平所述轮履复合式移动机器人底盘搭载平台的搭载平台调平机构。本发明有结构简单、成本低的优点,且具有自动调平系统,提高了农业机器人的数字智能化水平;本发明能够根据环境按需切换轮式和履带两种运动模式,具有出色的复杂地形适应性。本发明采用气动控制系统,缩短变形响应时间,提高机器人底盘的行进效率;并且采用剪叉式升降
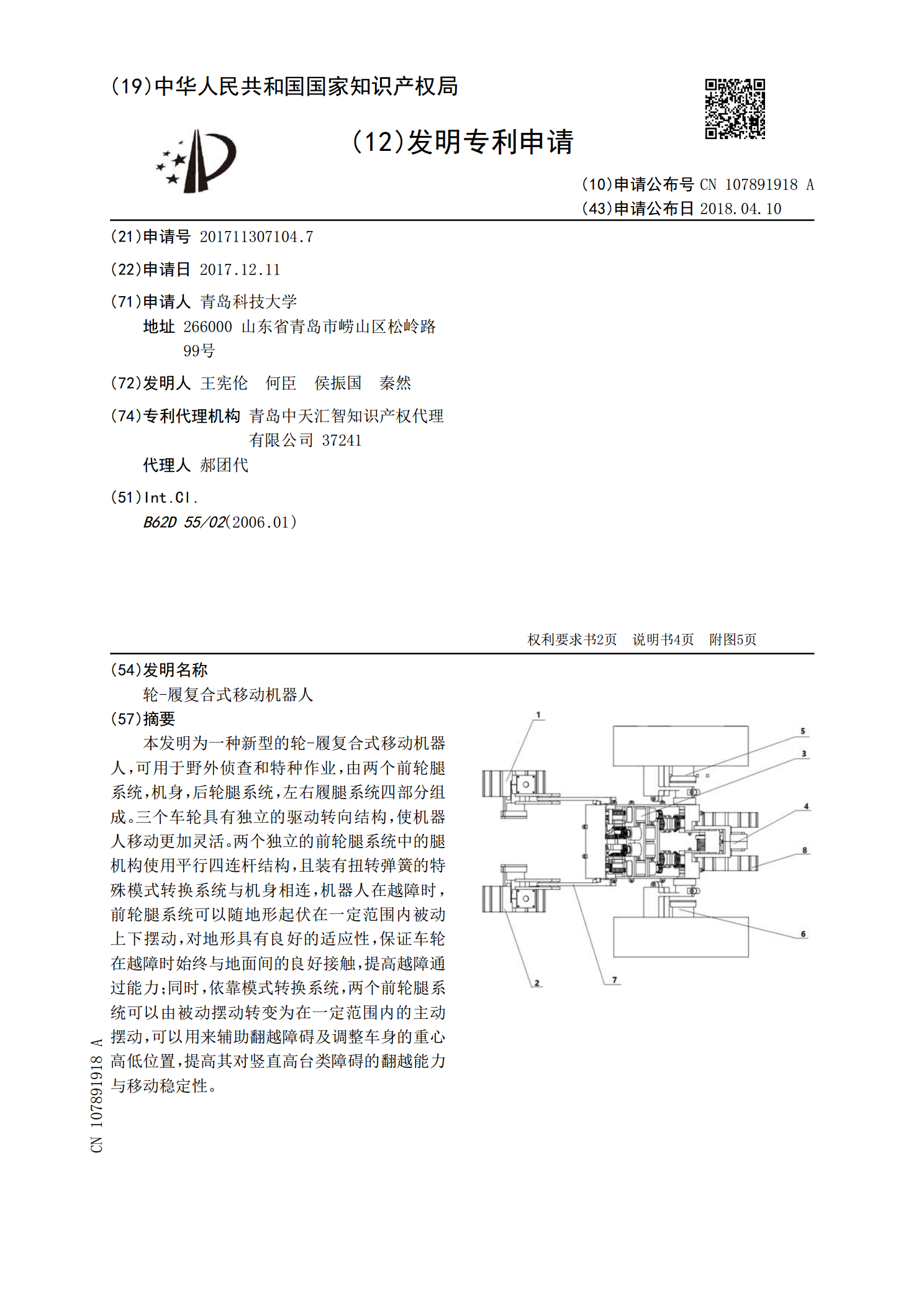
轮‑履复合式移动机器人.pdf
本发明为一种新型的轮‑履复合式移动机器人,可用于野外侦查和特种作业,由两个前轮腿系统,机身,后轮腿系统,左右履腿系统四部分组成。三个车轮具有独立的驱动转向结构,使机器人移动更加灵活。两个独立的前轮腿系统中的腿机构使用平行四连杆结构,且装有扭转弹簧的特殊模式转换系统与机身相连,机器人在越障时,前轮腿系统可以随地形起伏在一定范围内被动上下摆动,对地形具有良好的适应性,保证车轮在越障时始终与地面间的良好接触,提高越障通过能力;同时,依靠模式转换系统,两个前轮腿系统可以由被动摆动转变为在一定范围内的主动摆动,可以