
自导向运载平台及该运载平台导航控制方法.pdf

一吃****海逸


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自导向运载平台及该运载平台导航控制方法.pdf
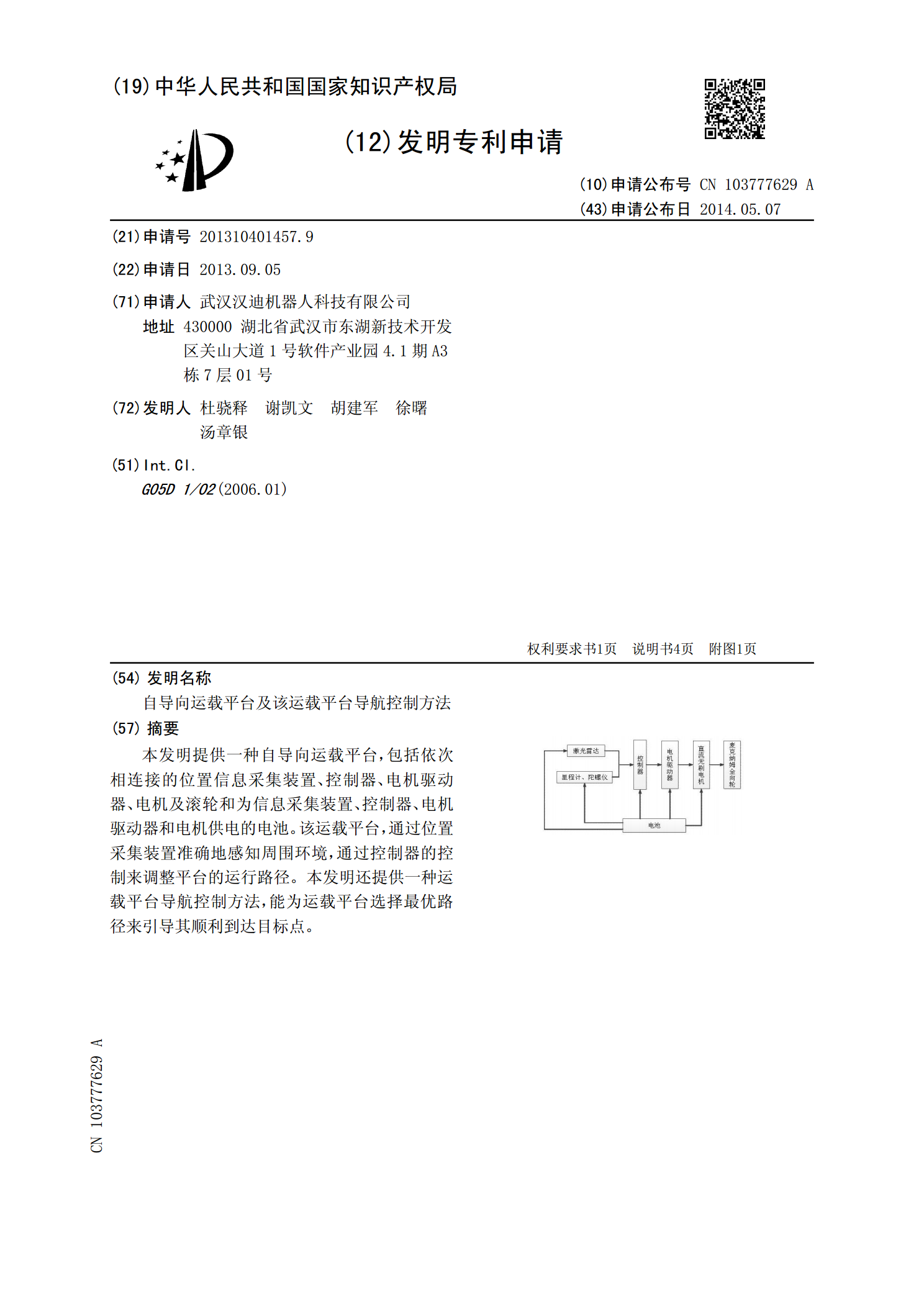
本发明提供一种自导向运载平台,包括依次相连接的位置信息采集装置、控制器、电机驱动器、电机及滚轮和为信息采集装置、控制器、电机驱动器和电机供电的电池。该运载平台,通过位置采集装置准确地感知周围环境,通过控制器的控制来调整平台的运行路径。本发明还提供一种运载平台导航控制方法,能为运载平台选择最优路径来引导其顺利到达目标点。
一种运载平台.pdf
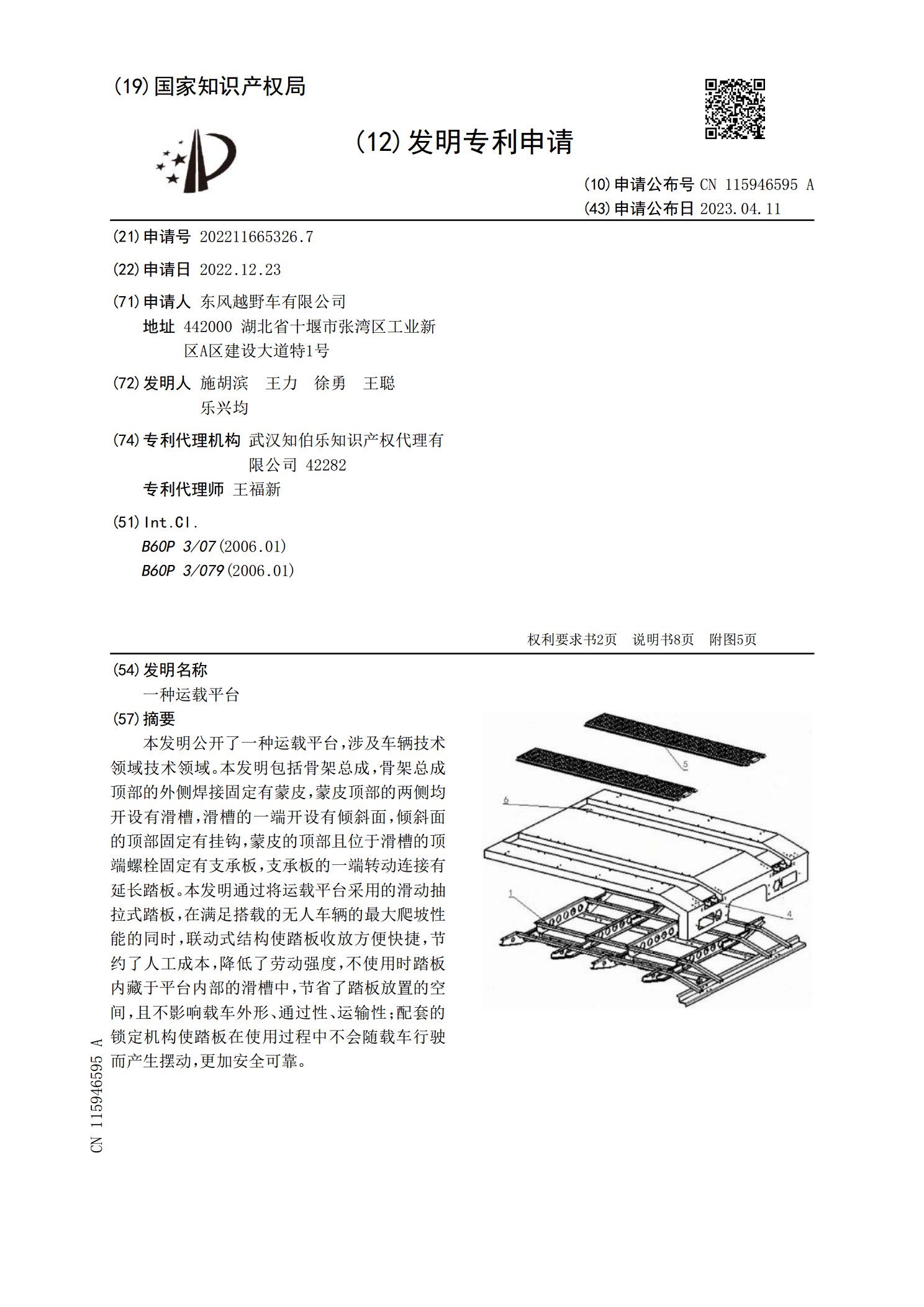
本发明公开了一种运载平台,涉及车辆技术领域技术领域。本发明包括骨架总成,骨架总成顶部的外侧焊接固定有蒙皮,蒙皮顶部的两侧均开设有滑槽,滑槽的一端开设有倾斜面,倾斜面的顶部固定有挂钩,蒙皮的顶部且位于滑槽的顶端螺栓固定有支承板,支承板的一端转动连接有延长踏板。本发明通过将运载平台采用的滑动抽拉式踏板,在满足搭载的无人车辆的最大爬坡性能的同时,联动式结构使踏板收放方便快捷,节约了人工成本,降低了劳动强度,不使用时踏板内藏于平台内部的滑槽中,节省了踏板放置的空间,且不影响载车外形、通过性、运输性;配套的锁定机构
一种桥梁检测运载车及运载平台系统.pdf
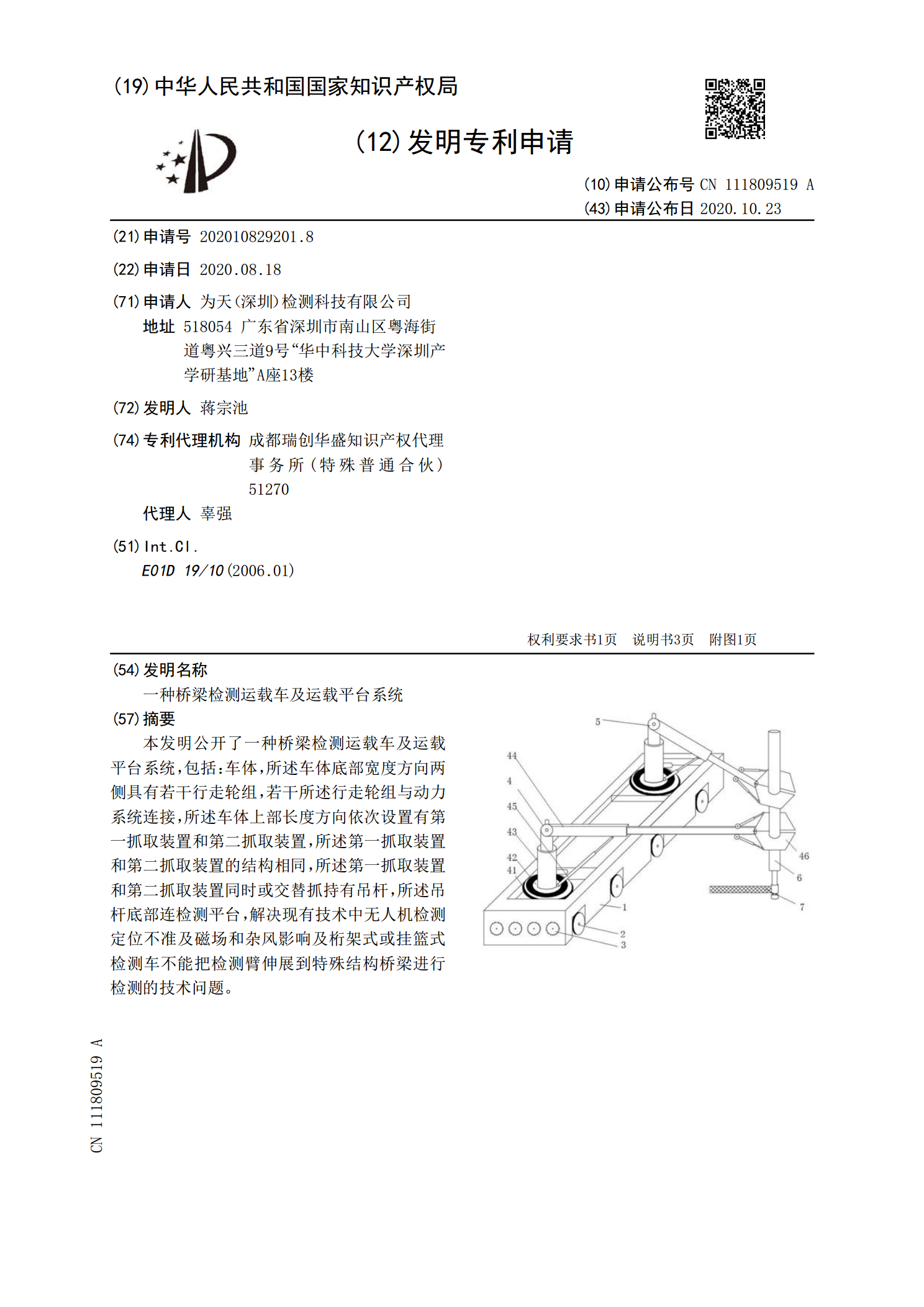
本发明公开了一种桥梁检测运载车及运载平台系统,包括:车体,所述车体底部宽度方向两侧具有若干行走轮组,若干所述行走轮组与动力系统连接,所述车体上部长度方向依次设置有第一抓取装置和第二抓取装置,所述第一抓取装置和第二抓取装置的结构相同,所述第一抓取装置和第二抓取装置同时或交替抓持有吊杆,所述吊杆底部连检测平台,解决现有技术中无人机检测定位不准及磁场和杂风影响及桁架式或挂篮式检测车不能把检测臂伸展到特殊结构桥梁进行检测的技术问题。
安葬工作系统及运载平台对位方法.pdf
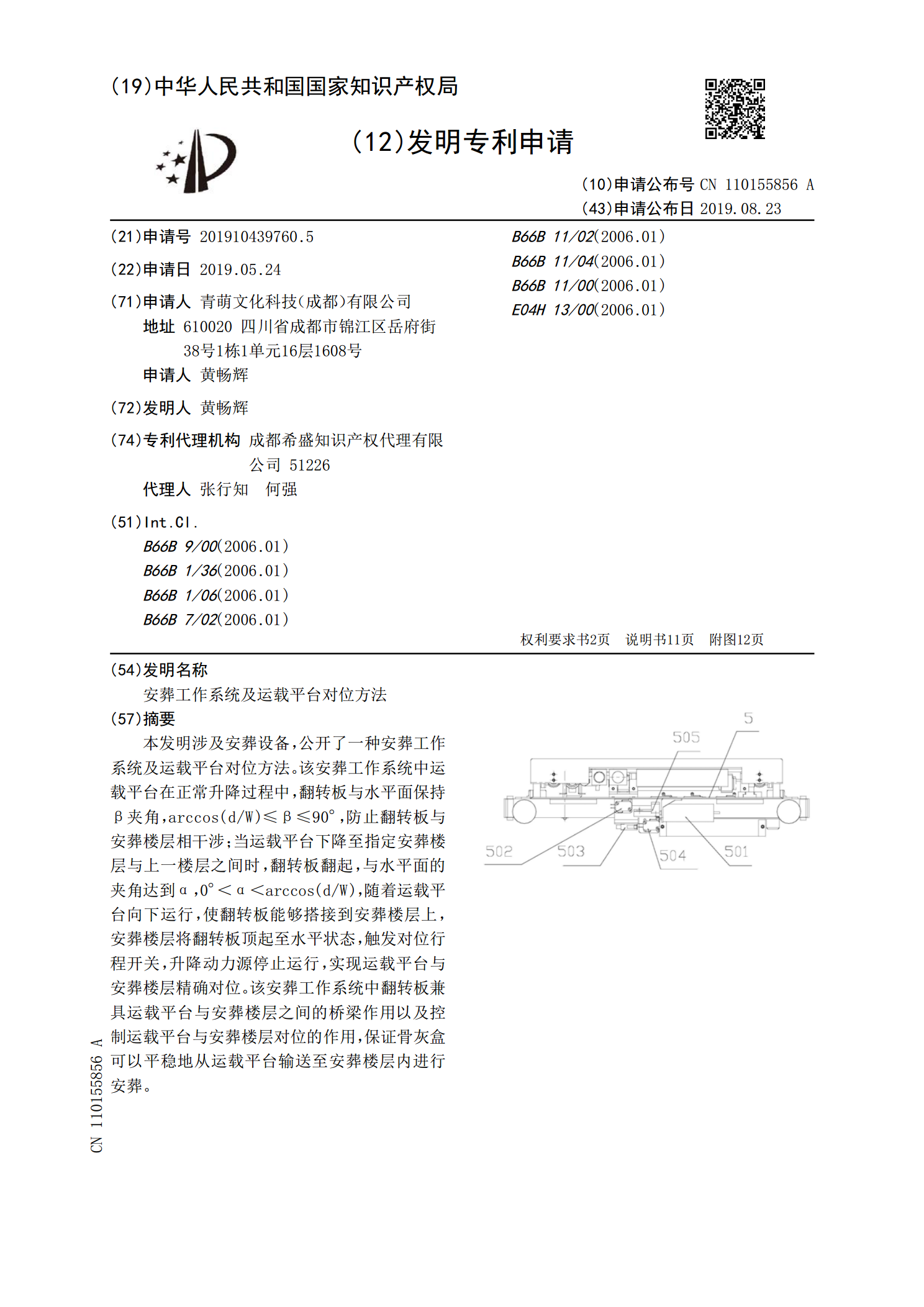
本发明涉及安葬设备,公开了一种安葬工作系统及运载平台对位方法。该安葬工作系统中运载平台在正常升降过程中,翻转板与水平面保持β夹角,arccos(d/W)≤β≤90°,防止翻转板与安葬楼层相干涉;当运载平台下降至指定安葬楼层与上一楼层之间时,翻转板翻起,与水平面的夹角达到α,0°<α<arccos(d/W),随着运载平台向下运行,使翻转板能够搭接到安葬楼层上,安葬楼层将翻转板顶起至水平状态,触发对位行程开关,升降动力源停止运行,实现运载平台与安葬楼层精确对位。该安葬工作系统中翻转板兼具运载平台与安葬楼层之间
一种负重运载平台.pdf
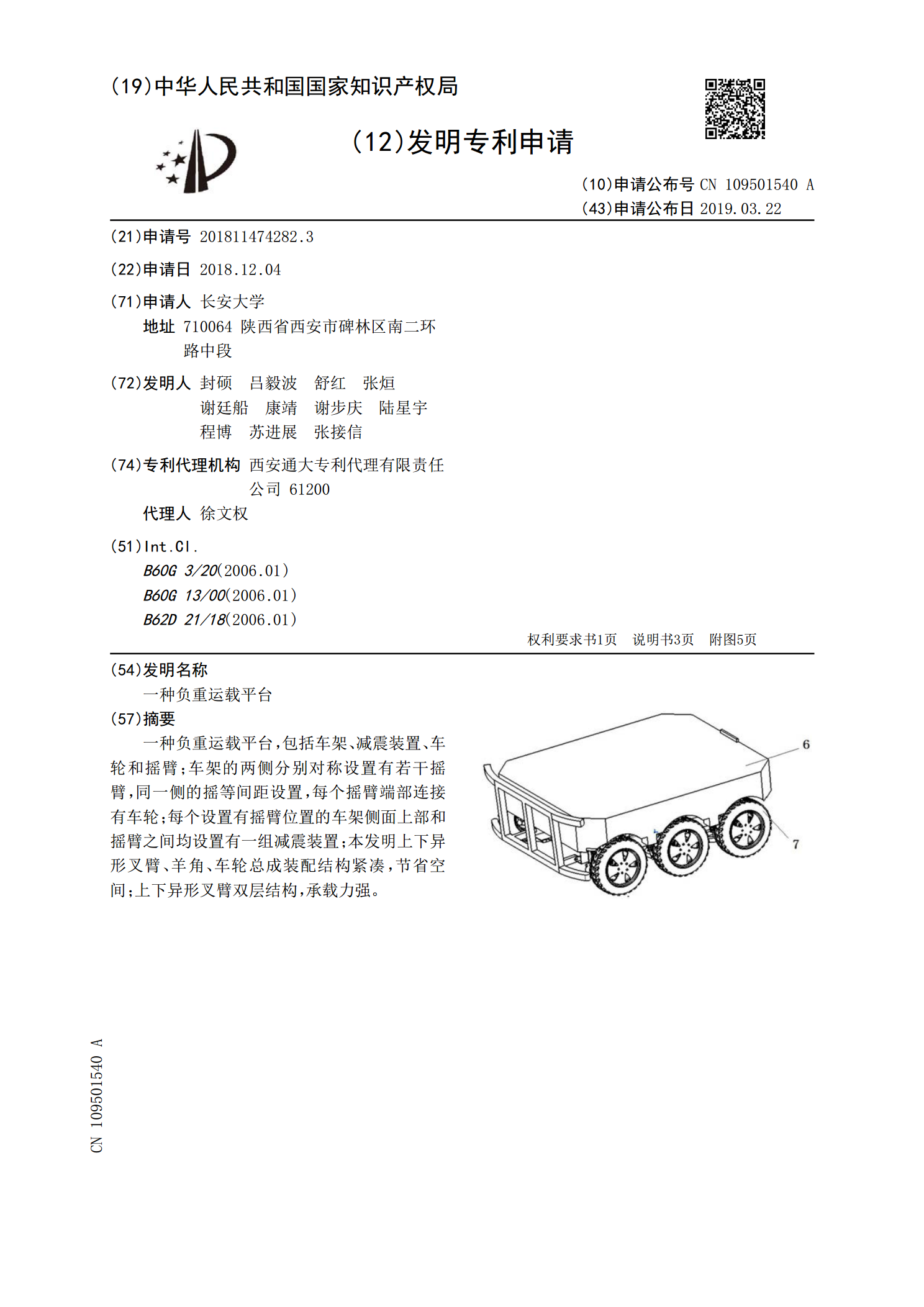
一种负重运载平台,包括车架、减震装置、车轮和摇臂;车架的两侧分别对称设置有若干摇臂,同一侧的摇等间距设置,每个摇臂端部连接有车轮;每个设置有摇臂位置的车架侧面上部和摇臂之间均设置有一组减震装置;本发明上下异形叉臂、羊角、车轮总成装配结构紧凑,节省空间;上下异形叉臂双层结构,承载力强。