
用于评估车辆的轮胎参数的方法.pdf

是你****辉呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于评估车辆的轮胎参数的方法.pdf
本发明涉及一种用于评估车辆(2)的轮胎参数(48)的方法,包括以下步骤:-测量(14)车辆(2)的参考运动(32);-基于排除了待评估的轮胎参数(48)的模型(44)对车辆(2)的模型运动(46)建模(38);和-基于参考运动(32)和模型运动(46)的对比评估(50)车辆(2)的轮胎参数(44)。
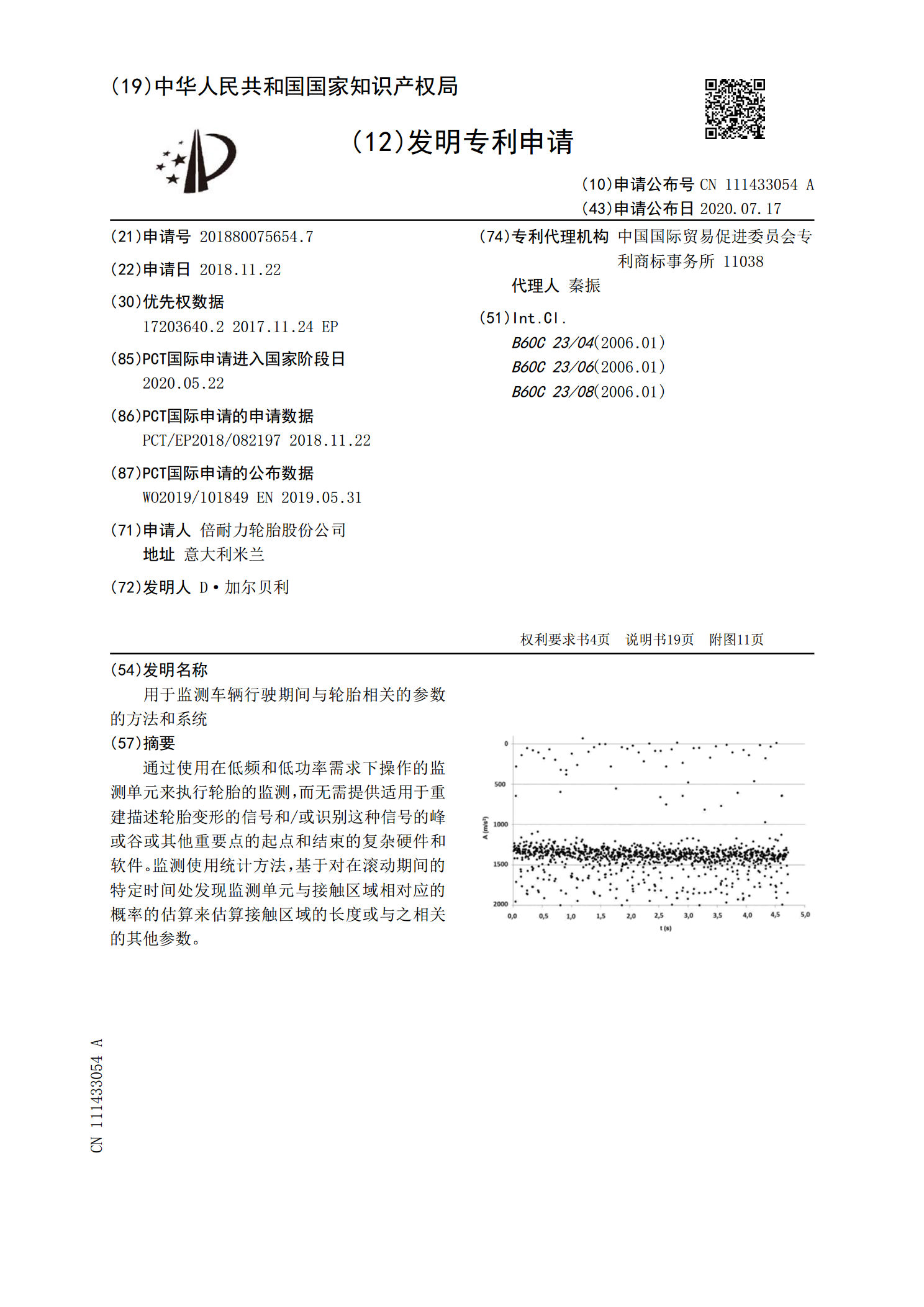
用于监测车辆行驶期间与轮胎相关的参数的方法和系统.pdf
通过使用在低频和低功率需求下操作的监测单元来执行轮胎的监测,而无需提供适用于重建描述轮胎变形的信号和/或识别这种信号的峰或谷或其他重要点的起点和结束的复杂硬件和软件。监测使用统计方法,基于对在滚动期间的特定时间处发现监测单元与接触区域相对应的概率的估算来估算接触区域的长度或与之相关的其他参数。

用于构建用于车辆车轮的轮胎的方法以及用于车辆车轮的轮胎.pdf
本发明涉及一种用于构建用于车辆车轮的轮胎的方法,所述方法包括:形成多个条状元件(13),使得各条状元件(13)的相对端边缘(24)根据至少一个切割角(t、t1、t2)进行切割;形成彼此径向叠置在成型鼓(2)的径向外部的铺设表面(14)上的至少一个第一增强层(5a)和一个第二增强层(5b),其中,各增强层(5a、5b)包括以相互接近的关系周向设置的接续续的条状元件(13),其中,各条状元件(13)的所述相对端边缘(24)彼此接续地形成所述第一增强层(5a)和所述第二增强层(5b)的轴向相对的相应边缘(Ba、
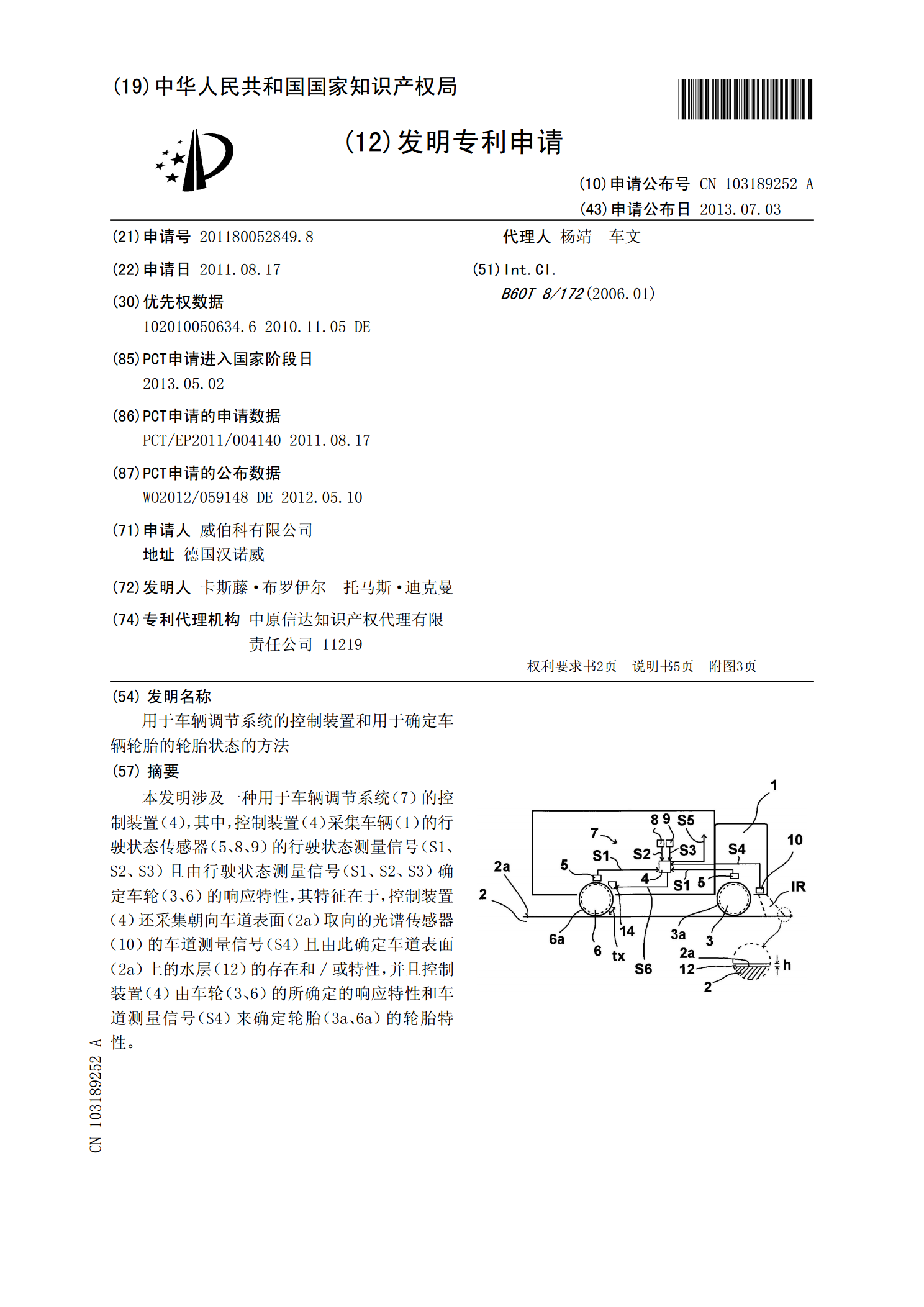
用于车辆调节系统的控制装置和用于确定车辆轮胎的轮胎状态的方法.pdf
本发明涉及一种用于车辆调节系统(7)的控制装置(4),其中,控制装置(4)采集车辆(1)的行驶状态传感器(5、8、9)的行驶状态测量信号(S1、S2、S3)且由行驶状态测量信号(S1、S2、S3)确定车轮(3、6)的响应特性,其特征在于,控制装置(4)还采集朝向车道表面(2a)取向的光谱传感器(10)的车道测量信号(S4)且由此确定车道表面(2a)上的水层(12)的存在和/或特性,并且控制装置(4)由车轮(3、6)的所确定的响应特性和车道测量信号(S4)来确定轮胎(3a、6a)的轮胎特性。
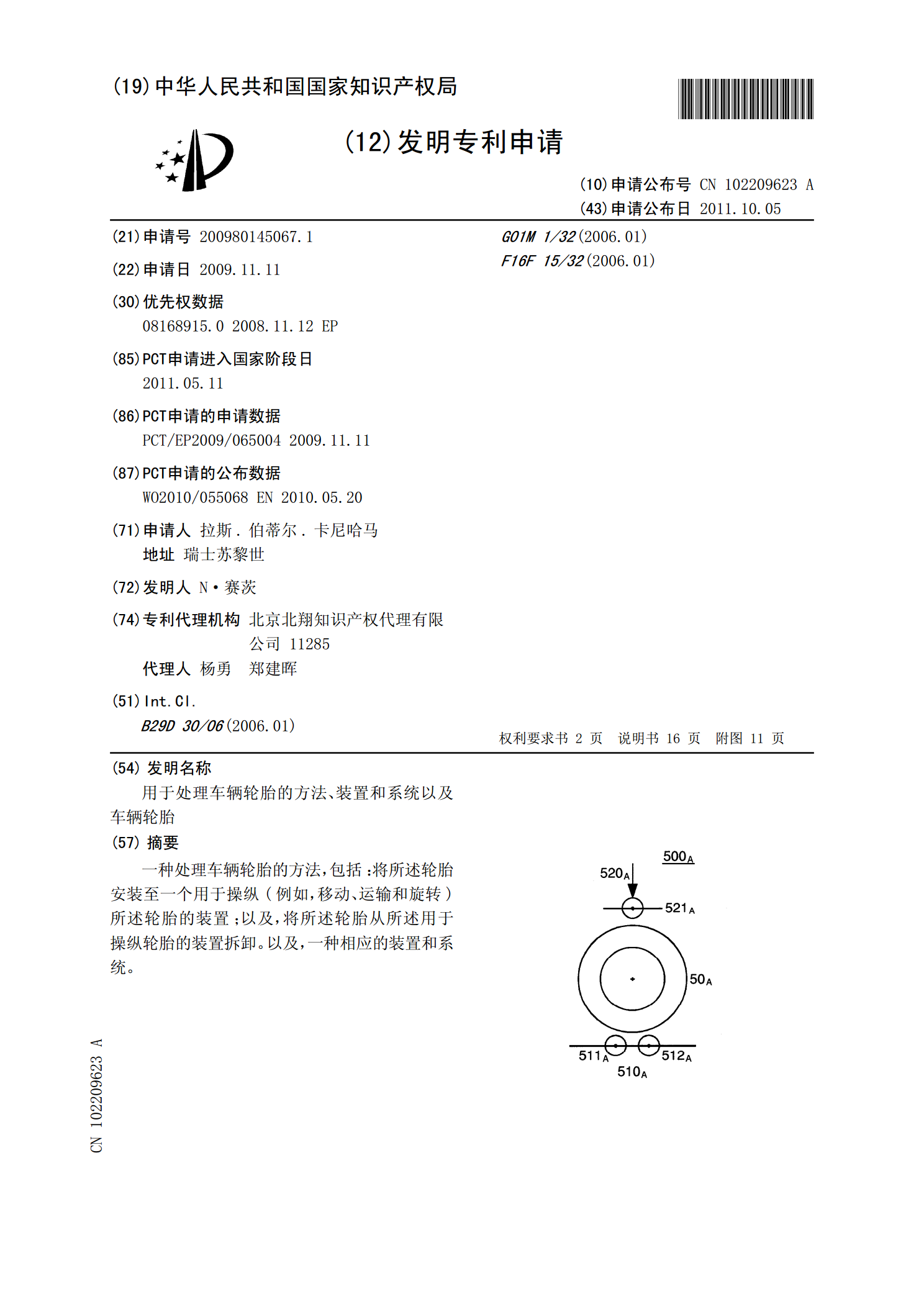
用于处理车辆轮胎的方法、装置和系统以及车辆轮胎.pdf
一种处理车辆轮胎的方法,包括:将所述轮胎安装至一个用于操纵(例如,移动、运输和旋转)所述轮胎的装置;以及,将所述轮胎从所述用于操纵轮胎的装置拆卸。以及,一种相应的装置和系统。