
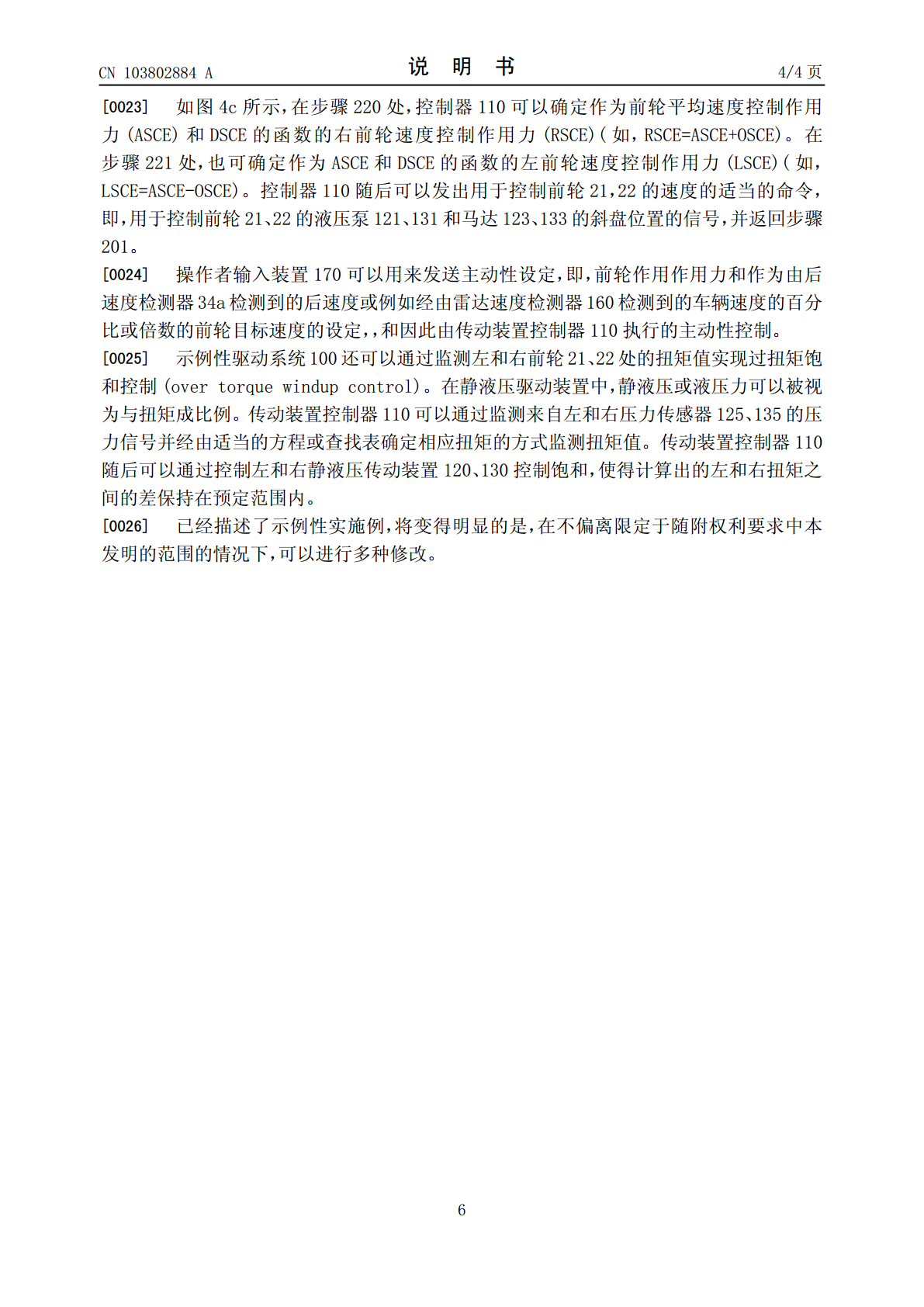
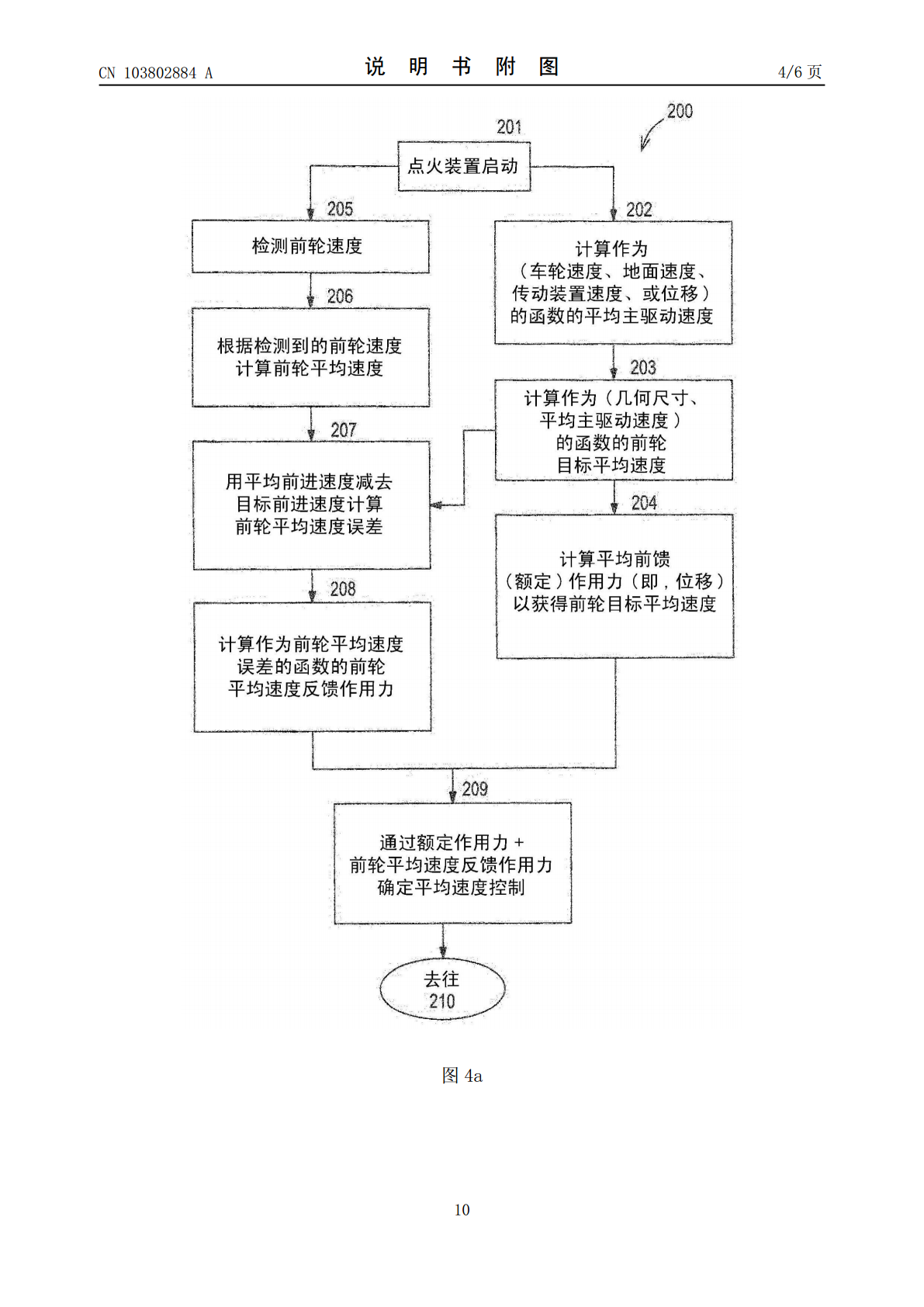
前轮驱动控制.pdf

骊蓉****23

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

前轮驱动控制.pdf
本发明公开了一种前轮动力系统,其使得能够独立地控制至每个车轮的动力以及获得对平均速度和前轮差速的直接控制。
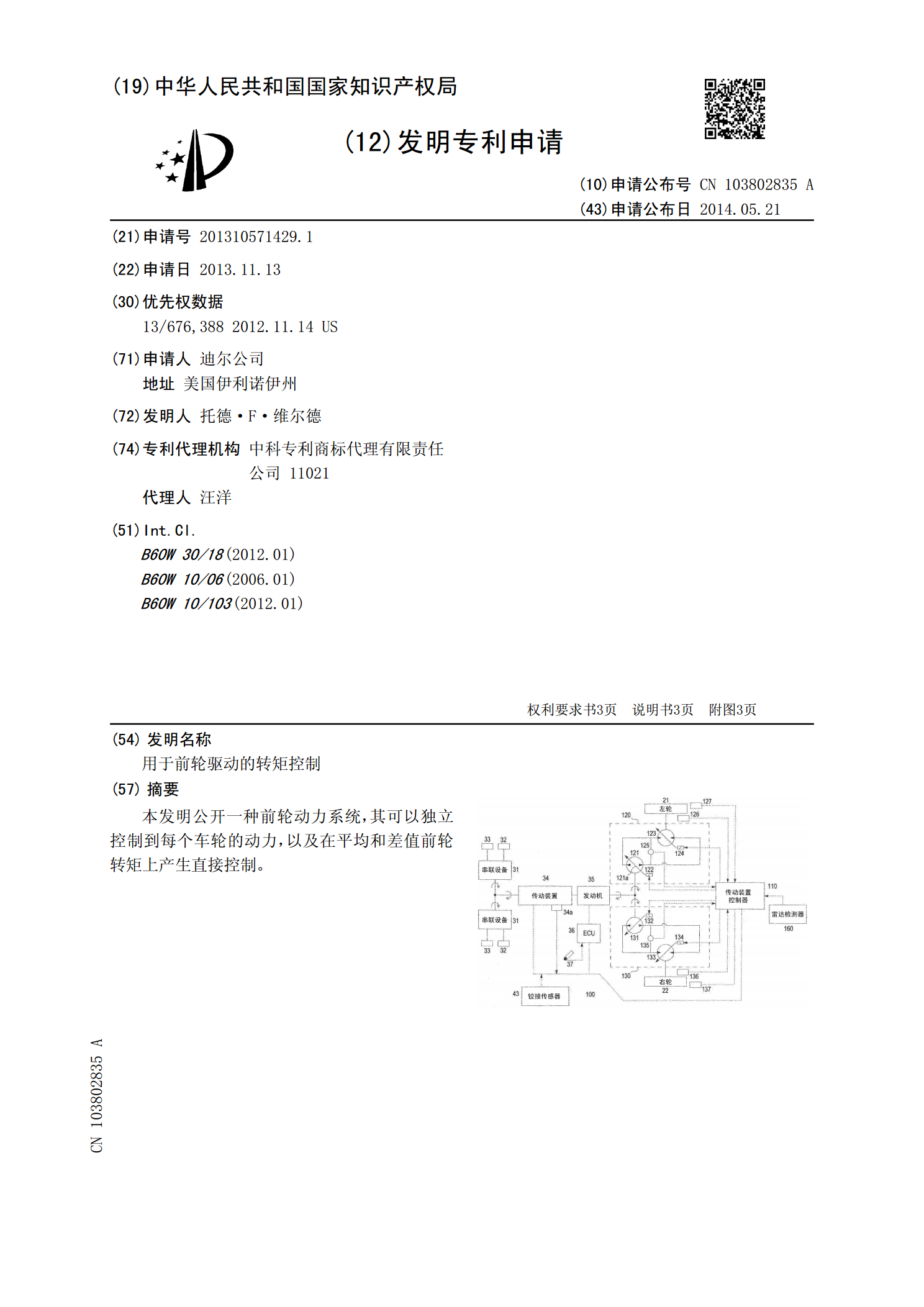
用于前轮驱动的转矩控制.pdf
本发明公开一种前轮动力系统,其可以独立控制到每个车轮的动力,以及在平均和差值前轮转矩上产生直接控制。
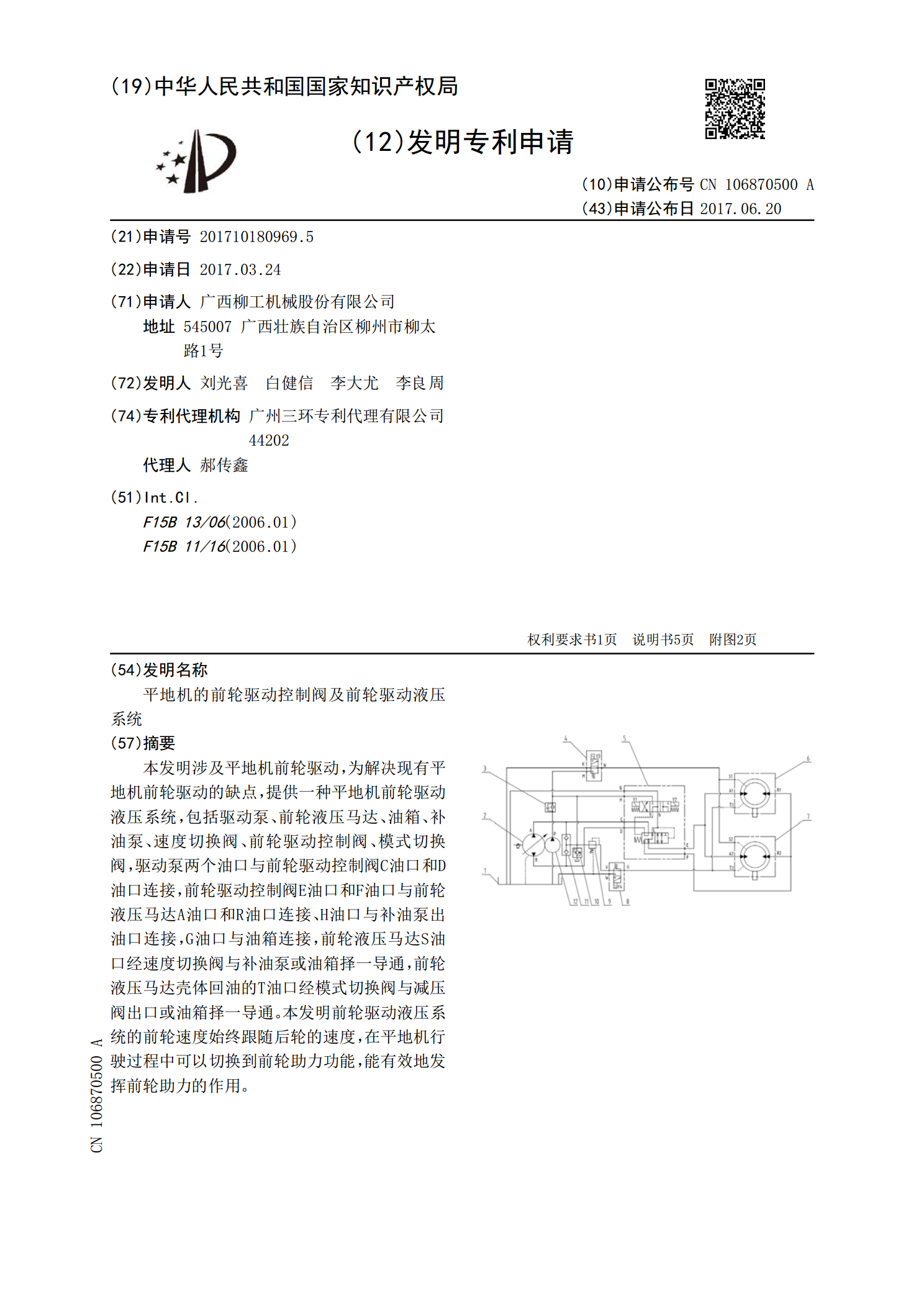
平地机的前轮驱动控制阀及前轮驱动液压系统.pdf
本发明涉及平地机前轮驱动,为解决现有平地机前轮驱动的缺点,提供一种平地机前轮驱动液压系统,包括驱动泵、前轮液压马达、油箱、补油泵、速度切换阀、前轮驱动控制阀、模式切换阀,驱动泵两个油口与前轮驱动控制阀C油口和D油口连接,前轮驱动控制阀E油口和F油口与前轮液压马达A油口和R油口连接、H油口与补油泵出油口连接,G油口与油箱连接,前轮液压马达S油口经速度切换阀与补油泵或油箱择一导通,前轮液压马达壳体回油的T油口经模式切换阀与减压阀出口或油箱择一导通。本发明前轮驱动液压系统的前轮速度始终跟随后轮的速度,在平地机行
平地机前轮驱动控制系统.pdf
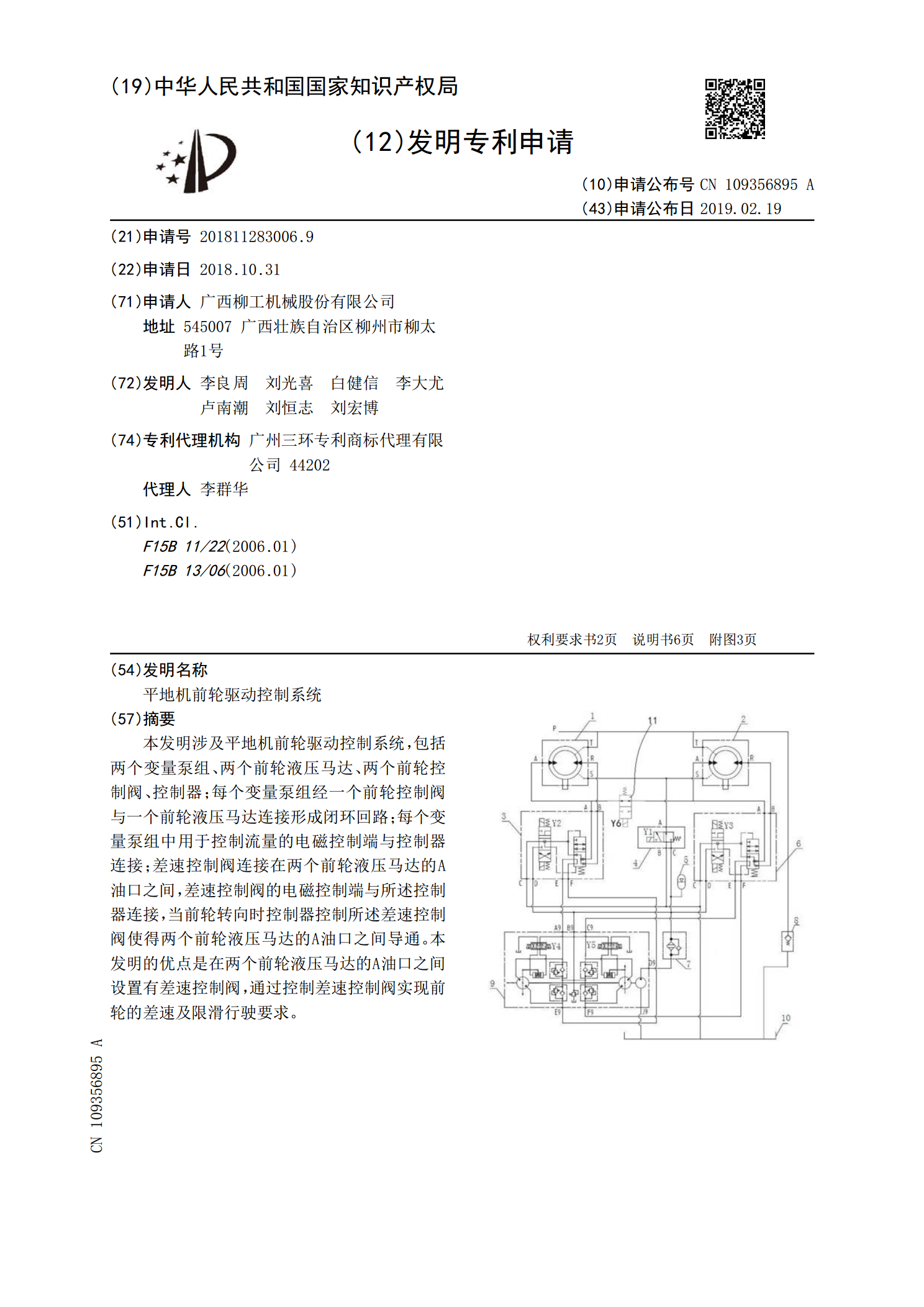
本发明涉及平地机前轮驱动控制系统,包括两个变量泵组、两个前轮液压马达、两个前轮控制阀、控制器;每个变量泵组经一个前轮控制阀与一个前轮液压马达连接形成闭环回路;每个变量泵组中用于控制流量的电磁控制端与控制器连接;差速控制阀连接在两个前轮液压马达的A油口之间,差速控制阀的电磁控制端与所述控制器连接,当前轮转向时控制器控制所述差速控制阀使得两个前轮液压马达的A油口之间导通。本发明的优点是在两个前轮液压马达的A油口之间设置有差速控制阀,通过控制差速控制阀实现前轮的差速及限滑行驶要求。

平地机前轮驱动控制系统.pdf
本发明涉及平地机前轮驱动控制系统,包括左右液压马达、左右驱动泵、控制器,左右驱动泵与对应左右液压马达连接形成闭式回路,左右驱动泵中用于控制流量的电磁控制端与控制器连接,控制器根据前轮转向角度分别计算左右前轮的转弯半径,根据平地机行走基准速度计算左右前轮滚动行走时的各自转速,分别输出相应电流控制左右驱动泵输出液压油驱动左右液压马达按照对应的左前轮和右前轮速度计算值转动,再根据左右前轮的实际速度值修正电流输入以适应转向需求。本发明的优点是在平地机转向时,根据前轮转向角度大小调节前轮马达所需流量以适应转向需求,