预览加载中,请您耐心等待几秒...
预览加载中,请您耐心等待几秒...

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
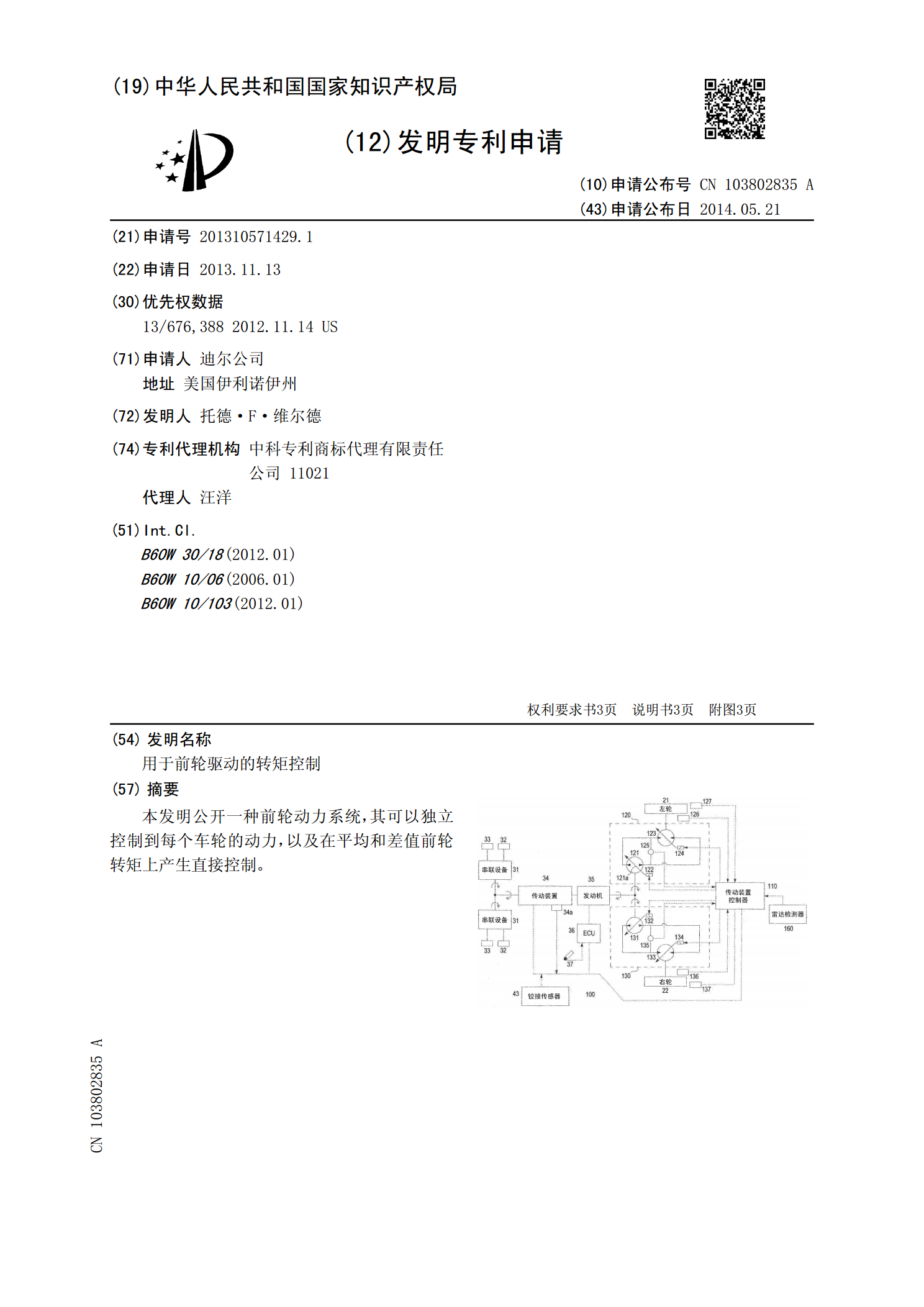
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号(10)申请公布号CNCN103802835103802835A(43)申请公布日2014.05.21(21)申请号201310571429.1(22)申请日2013.11.13(30)优先权数据13/676,3882012.11.14US(71)申请人迪尔公司地址美国伊利诺伊州(72)发明人托德·F·维尔德(74)专利代理机构中科专利商标代理有限责任公司11021代理人汪洋(51)Int.Cl.B60W30/18(2012.01)B60W10/06(2006.01)B60W10/103(2012.01)权权利要求书3页利要求书3页说明书3页说明书3页附图3页附图3页(54)发明名称用于前轮驱动的转矩控制(57)摘要本发明公开一种前轮动力系统,其可以独立控制到每个车轮的动力,以及在平均和差值前轮转矩上产生直接控制。CN103802835ACN103825ACN103802835A权利要求书1/3页1.一种用于车辆的驱动系统,所述车辆具有框架,所述驱动系统包括:前部,第一前轮、第二前轮、用于检测第一和第二前轮的转向角度的车轮角度传感器、用于为第一和第二前轮提供动力的前流体静压动力系统,该动力系统能够独立地向第一和第二前轮施加转矩;后部,包括后轮和后动力系统;发动机;操作者输入装置,用于检测和发出操作者对驱动系统的要求量;与操作者输入装置和车轮角度传感器通信的控制器,该控制器被连接到后驱动系统并且被可操作地连接到前流体静压动力系统,该控制器确定作为后驱动转矩的百分比的目标前轮转矩,该控制器基于来自前流体静压动力系统的压力和位移测量值确定反馈前轮转矩,该控制器确定作为目标前轮转矩和反馈前轮转矩之间的差值的函数的用于左前轮和右前轮的校正位移命令,该控制器确定作为至少测得的后部速度和驱动系统的要求量的函数的用于左前轮和右前轮的标称平均位移命令,该控制器通过使标称平均位移命令与校正位移命令相加来确定平均位移命令。2.根据权利要求1所述的驱动系统,进一步包括车轮角度传感器,用于检测第一和第二前轮的转向角度,其中控制器确定作为前轮驱动系统和车轮转向角的要求量的函数的目标差值转矩,控制器确定作为前轮动力系统处的当前位移和测得的压力的函数的基准差值转矩,控制器确定作为目标差值转矩和反馈差值转矩之差的函数的差值校正命令,控制器确定作为至少所述要求量、测得的后轮速度和转向角的函数的标称差值前轮位移命令,控制器随后通过将标称差值前轮位移命令和差值校正命令相加来计算用于第一和第二前轮的差值位移命令。3.根据权利要求2所述驱动系统,其中控制器确定作为平均位移命令和差值位移命令之和的用于第一前轮的流体静压命令位移。4.根据权利要求3所述驱动系统,其中控制器确定作为平均位移命令和差值位移命令之差的用于第二前轮的流体静压命令位移。5.根据权利要求1所述驱动系统,还包括后流体静压传动装置,其中控制器确定作为后流体静压传动装置处的压力和位移的函数的后驱动转矩。6.根据权利要求1所述驱动系统,还包括后齿轮传动系统,其中控制器确定作为发动机转矩与发动机上已知负载之和的差的后驱动转矩。7.根据权利要求6所述驱动系统,其中控制器估算作为当前燃料使用率和当前发动机转速的函数的发动机转矩。8.根据权利要求1所述驱动系统,其中前流体静压动力系统包括第一流体静压动力系统和第二流体静压动力系统,第二流体静压动力系统独立于第一流体静压动力系统。9.根据权利要求1所述驱动系统,其中操作者输入装置是油门调节器。10.根据权利要求1所述驱动系统,其中操作者输入装置是主动驱动调节器。11.根据权利要求1所述驱动系统,还包括用于感测车辆铰接的车辆铰接传感器,其中控制器确定作为至少测得的后速度、驱动系统的要求量、车轮转向角和铰接角的函数的用于第一和第二前轮的标称平均位移命令。12.根据权利要求11所述驱动系统,其中控制器确定作为前轮驱动系统和车轮转向角2CN103802835A权利要求书2/3页的要求量的函数的目标差值转矩,控制器确定作为前轮动力系统处的当前位移和测得的压力的函数的测得的或基准差值转矩,控制器确定作为目标和反馈差值转矩之差的函数的差值校正命令,控制器确定作为至少所述要求量、测得的后速度和转向角的函数的标称差值前轮位移命令,控制器随后通过将标称差值前轮位移命令和差值校正命令相加来计算用于第一和第二前轮的差值位移命令。13.一种作业车辆,该车辆具有框架和驱动系统,所述驱动系统包括:前部,第一前轮、第二前轮、用于检测第一和第二前轮的转向角的车轮角度传感器、第一动力系统,所述第一动力系统包括用于为第一前轮提供动力的第一流体静压传动系统和用于为第二前轮提供动力的第二流体静压传动系统,第一和第二流体静压传动系统能够独立于